The isoperimetric problem for Lens spaces
Celso Viana

TL;DR
This paper solves the isoperimetric problem in Lens spaces with large fundamental groups, identifying the isoperimetric surfaces as geodesic spheres or tori of revolution, and connects special cases to the Willmore conjecture proof.
Contribution
It provides a complete solution for large fundamental group Lens spaces and links specific cases to the Willmore conjecture, advancing geometric analysis in these spaces.
Findings
Isoperimetric surfaces are geodesic spheres or tori of revolution.
Solution applies to Lens spaces with large fundamental groups.
Special cases relate to the proof of the Willmore conjecture.
Abstract
We solve the isoperimetric problem in the Lens spaces with large fundamental group. Namely, we prove that the isoperimetric surfaces are geodesic spheres or tori of revolution about geodesics. We also show that the isoperimetric problem in L(3,1) and L(3,2) follows from the proof of the Willmore conjecture by Marques and Neves.
Click any figure to enlarge with its caption.
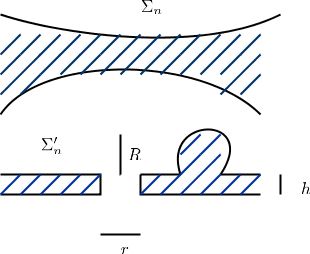 Figure 1
Figure 1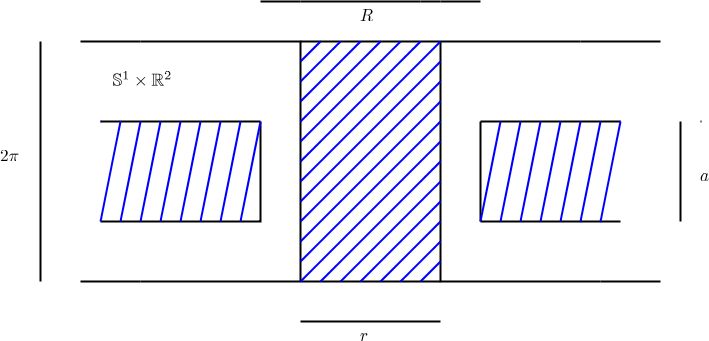 Figure 2
Figure 2 Figure 3
Figure 3Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsGeometric Analysis and Curvature Flows · Geometry and complex manifolds · Geometric and Algebraic Topology
The Isoperimetric Problem For Lens Spaces
Celso Viana
University College London UCL Union Building, 25 Gordon Street, London WC1E 6BT
Abstract.
We solve the isoperimetric problem in the Lens spaces with large fundamental group. Namely, we prove that the isoperimetric surfaces are geodesic spheres or tori of revolution about geodesics. We also show that the isoperimetric problem in and follows from the proof of the Willmore conjecture by Marques and Neves.
C.V. was supported by The EPSRC Centre for Doctoral Training in Geometry and Number Theory: The London School of Geometry and Number Theory
1. Introduction
The isoperimetric problem is a classical subject in Differential Geometry with its origin in ancient Greece. It consists in finding on a Riemannian manifold the regions that minimize the perimeter among sets enclosing the same volume. The solutions are called isoperimetric regions and their boundaries isoperimetric hypersurfaces. The Euclidean plane is historically the first space where the problem started to be investigated rigorously. It is now a well known fact that the round circles are the optimal curves for the problem. This geometric fact is often seen through the following classical inequality:
[TABLE]
where and stand for the length and the enclosed area of a simple closed curve respectively.
The framework of geometric measure theory and its tools work successfully well in tackling the aspects of existence and regularity of this variational problem. When is closed or homogeneous, then isoperimetric hypersurfaces do exist and are smooth up to a closed set of Hausdorff dimension . The regular part is a stable hypersurface of constant mean curvature. This major contribution to the isoperimetric problem was achieved thanks to the efforts of many people, including F. Almgren, R. Schoen, L. Simon, F. Morgan, and others (see [M] for a comprehensive list). Despite the long history of the problem, it remains largely open with few 3-manifolds where the problem is completely understood.
The simply connected space forms, , and , are the most appealing spaces to begin the study of the isoperimetric problem. It turns out that their symmetries are enough to characterize the geodesic spheres as the isoperimetric hypersurfaces.
A complete solution on with the standard product metric can be found in [PR]. For other homogeneous manifolds with certain product structure, such as , , and , see [HH], [PR], and [P] respectively. The case is also treated in [PR] and they show that when unduloids are minimizers rather than cylinders for certain volumes. One key idea exploited in the results listed above is the use of symmetry to reduce the problem to an ODE analysis. The case where is a flat torus is not solved in full; great progress can be found in [RR1] and in [HPRR]. More generally, it is known that boundaries of small isoperimetric regions in closed manifolds are nearly round spheres, see [MJ]. To finish this brief and not exhaustive account of results on the isoperimetric problem we mention that Bray and Morgan ( [B] and [BM]) classified the horizon homologous isoperimetric surfaces in the Schwarzschild manifold. The work in [B] highlighted the interesting relationship between isoperimetric surfaces and the concept of mass in general relativity.
We will be interested in spherical space forms in this paper. A significant result in this direction was given in [RR] where A. Ros and M. Ritoré solved the isoperimetric problem in the projective space . They show that the solutions are geodesic spheres or flat tori. Later, A. Ros [R] used the above result to give a proof of the Willmore conjecture in for the special case of surfaces that are invariant by the antipodal map.
The real projective space is a special case of an important family of Riemannian manifolds, namely the Lens spaces . These are elliptic space forms obtained as a quotient of by a finite group of isometries that are isomorphic to but which also depend on . They are, along with , characterized by having Heegaard genus one.
We give a complete solution for the isoperimetric problem in the Lens spaces with large fundamental group:
Theorem 1.1**.**
There exists a positive integer such that for every and every the isoperimetric surfaces in are either geodesic spheres or tori of revolution about geodesics.
The isoperimetric problem in dimension three was previously solved for only a finite number of non-diffeomorphic 3-manifolds.
We also add to the literature the observation that the proof of the Willmore conjecture by Marques and Neves [MN] can be applied to extend the work of Ros and Ritoré [RR], on the classification of stable CMC surfaces in , to and : 111 and are diffeomorphic but not isometric.
Theorem 1.2**.**
The immersed stable CMC surfaces in and are either geodesic spheres or flat tori. Moreover, the minimal Clifford torus is, up to ambient isometries, the only index one minimal surface in and .
The idea of the proof of Theorem 1.1 is as follows. Stability implies that every isoperimetric surface is connected and its genus is or . If follows from a classical result of Hopf that if the genus is 0, then it is a geodesic sphere. From [RR] we know that if the genus is 1, then it is flat, and this forces the surface to be of revolution about a geodesic. We are left to rule out other topological types. To do so we argue by contradiction. We assume that there exists a sequence of Lens spaces with increasing fundamental group containing isoperimetric surfaces of genus . After a suitable rescaling on the metrics we use compactness results to obtain a limit for the sequence of Lens spaces which will be a flat three manifold of rank one. In the same way, the sequence of isoperimetric surfaces will converge to a flat surface in the respective ambient manifold. The topology of the surfaces will force the limit to be an union of planes. On the other hand, the minimization property rules this configuration out.
The arguments in the proof of Theorem 1.1 generalize naturally for the Berger Spheres . This is a well known one parameter family of homogeneous metrics on the 3-sphere; the case corresponds to the round metric. All the Hopf fibers in have the same length . When is not too small, spheres are the only solutions of the isoperimetric problem, see [TU]. When is very small, it is pointed out in [TU] that some tori are better candidates to solve the isoperimetric problem rather than spheres for certain volumes.
Theorem 1.3**.**
There exists such that for every the isoperimetric surfaces in the Berger spheres are either rotationally invariant spheres or tori.
Remark 1.4**.**
It follows from the work in [MHH] and [PR] that the minimal Clifford torus in (resp. ) is isoperimetric for every (resp. ), see Section 3.
Acknowledgements. I am grateful to my advisor André Neves for his constant encouragement and support during the course of this work. I also thank Jason Lotay for many helpful comments on an earlier version of this manuscript.
2. Preliminaries
Let be an orientable Riemannian manifold of dimension . The -dimensional Hausdorff measure of a region is denoted by . Similarly, we denote the -dimensional Hausdorff measure of the hypersurface by . The class of regions considered here are those of finite perimeter, see [S].
2.1. Isoperimetric
A region is called an Isoperimetric region if
[TABLE]
In this case, the hypersurface is called an Isoperimetric hypersurface.
In general, the existence of isoperimetric surfaces is handled by a compactness theorem from geometric measure theory. For non-compact manifolds one needs to be careful since a minimizing sequence of regions of fixed volume may drift off to infinity. We recommend [M] for a recent reference on the regularity of isoperimetric hypersurfaces:
Theorem 2.1**.**
Let be a closed Riemannian manifold. For every there exists an isoperimetric region satisfying . Moreover, is smooth up to a closed set of Hausdorff dimension .
2.2. Stability
Isoperimetric hypersurfaces are stable critical points of the area functional for variations that preserve the enclosed volume; thus, the regular part of isoperimetric hypersurfaces has constant mean curvature. More generally, we say an isometric immersion has constant mean curvature (CMC) if it is a critical point of the area functional for volume preserving variations. Critical points are called stable CMC if the second derivative of the area is non-negative for such variations.
Equivalently, is stable if for every with compact support such that , we have
[TABLE]
is the unit normal vector of and is the second fundamental form of the immersion . The mean curvature of , denoted by , is defined by .
The study of immersed stable CMC hypersurfaces started in [BC] and [BCE] with a new characterization of the geodesic spheres in the simply connected space forms , and . The classification of stable CMC surfaces is often a way to approach the isoperimetric problem in reasonable spaces. With this purpose in mind, A. Ros and M. Ritoré in [RR] used the Hersch-Yau trick to study orientable stable CMC surfaces on three manifolds of positive Ricci curvature.
Theorem 2.2** (Ros-Ritoré [RR]).**
Let be a closed three manifold with positive Ricci curvature. If is a stable CMC immersion, then . Moreover, if or , then
[TABLE]
Proposition 2.3**.**
Let be a stable immersion with constant mean curvature into an elliptic space form . Then
- (1)
If or , then \big{(}1+H^{2}\big{)}|\Sigma|\leq 2\pi. 2. (2)
If or and , then is an embedding. Moreover, if , then the pullback of , through the covering map , is connected. 3. (3)
If or , then or .
Proof.
The first statement follows from the previous theorem since . Let be the induced map in fundamental groups. As has finite index there exists a finite covering such that Im\big{(}\psi_{*}\big{)}=K and \big{(}\phi\circ\psi\big{)}_{*}=0. This means there exists a lifting of this map into and we denote it by . It follows that \big{(}1+H^{2}\big{)}|\widetilde{\Sigma}|\leq|G|\,2\pi. If is not an embedding, then is not embedding either. By the work of Li and Yau [LY] the Willmore energy of the immersed surface , i.e. \mathcal{W}(\widetilde{\Sigma})=\int_{\widetilde{\Sigma}}\big{(}1+H^{2}\big{)}dvol_{\Sigma}, is strictly greater222The case is discussed in [RR]. than . Therefore, if , we obtain a contradiction and is an embedding. Moreover, for closed surfaces with genus greater than or equal to in the Willmore conjecture, recently proved in [MN], states that . Let be the pre-image of by the universal covering map, then
[TABLE]
Therefore, if , then and . In particular, if or , then there exist no stable CMC surface with . ∎
Definition \the\fnum.
For each we define the Clifford Torus as:
[TABLE]
Every flat tori with constant mean curvature in is congruent to a Clifford torus . This follows from the Rigidity theorem, pg. 49 in [C], for they have the same second fundamental form.
Corollary 2.4**.**
The stable CMC surfaces in and are totally umbilical spheres or flat tori. In addition, the index one minimal surfaces in and are congruent to the the projection of minimal Clifford torus.
Proof.
Let , , be in the conditions of the corollary. By Proposition 2.3, or . If , then it follows from the Hopf holomorphic quadratic differential that is totally umbilical. If , then it is proved in [RR] that is flat. ∎
2.3. Isoperimetric profile
The isoperimetric properties of can be encapsulated in a single function called the Isoperimetric profile. This is the function defined by
[TABLE]
We finish the section with some well known facts on the analytic nature of . These will be used later in Section 3.
Let be an isoperimetric region in such that for some . The function has left and right derivative and . In addition, if is the mean curvature of in the direction of the inward unit vector, then
[TABLE]
The second derivative also exists but weakly in the sense of comparison functions. More precisely, we say weakly at if there exists a smooth function such that , , and . In this sense we have
[TABLE]
The equations (2.4) and (2.5) are first presented on [BP]. We sketch the proof of (2.4) and (2.5).
Let be the variation of reparametrized in terms of the enclosed volume . In addition, let (resp. ) be the area of (resp. ). By the first variation formula for the area and volume we have and respectively. Since , we conclude that and also that . On the other hand, the second derivative of area for general variations implies the following:
[TABLE]
Hence, in the sense of comparison functions, (2.5) follows from:
[TABLE]
3. The Isoperimetric problem in the Lens Spaces
In order to define the Lens spaces, we first recall the round three sphere as:
[TABLE]
Fix integers with the following property and . Let be the group acting on as follows:
[TABLE]
The group acts freely and properly discontinuous on . The orbit space is a closed three manifold called the Lens space, it is denoted by .
The Hopf fibration, which is the Riemannian submersion defined by , can be extended naturally to . Indeed, the group acts on the set of Hopf fibers through the following cyclic action on :
[TABLE]
The Hopf fibration for is then defined as . The set is a two dimensional orbifold with conical singularities at the north and south pole.
The preimage of horizontal slices of via correspond to the Clifford torus described in (2.2). They are natural candidates to solve the Isoperimetric problem in .
3.1. Comments on Steiner Symmetrization for Lens Spaces
Steiner and Schwarz symmetrization theorems were proved in [MHH] for certain fiber bundles such as the Lens spaces. To explain this symmetrization procedure we restrict to the case where the Hopf fibration is a smooth Riemannian submersion.
The symmetrization consist of associating to each set of finite perimeter the set in the product manifold defined by replacing the slice of in each fiber with a ball of the same volume about the respective fiber in the product. The coarea formula for Riemannian submersions implies that encloses the same amount of volume as . It is proved in [MHH] that has no greater perimeter than .
One immediate consequence is that . Applying the classification of the isoperimetric problem on , [PR], we conclude that in a interval around . In particular, the minimal Clifford torus is isoperimetric in for every . The isoperimetric profiles, however, do not coincide as the profile of geodesic spheres on the respective spaces are different. Therefore, this technique is not enough to completely solve the isoperimetric problem.
It is important to point out that, for general Lens spaces , there is no analogue of [PR] for which is a manifold having codimension two singularities.
3.2. Some aspects of Lens Spaces
For every the injectivity radius of at satisfies , with equality only at points in the critical fibers. Indeed, for we have:
[TABLE]
However, is not true in general that as .
Example 3.1**.**
Let’s consider , . We show that the injectivity radius at points far away from the critical fibres are . If the round metric is scaled by the factor , then we have the Riemannian submersion:
[TABLE]
The fibers have constant length except the critical fibres which have length . The right hand side will converge, as , to . It follows from the coarea formula for Riemannian submersions that the volume of the geodesic ball in \big{(}L(k^{2},k+1),k^{2}g_{0},x_{k}\big{)} is bounded from below. Therefore, by Cheeger’s inequality, Lemma 51 in [PP], the injectivity radius of the sequence \big{(}L(k^{2},k+1),k^{2}g_{0},x_{k}\big{)} is bounded from below. This sequence converges to a flat .
If , then for some constant independent of . Thus intrinsic and extrinsic distances on are equivalent.
Lemma 3.2**.**
If and the extrinsic diameter of in is bounded from below, then .
Proof.
Let and recall that . Without loss of generality, let’s assume that . Hence, under the rescaled metric , the extrinsic diameter of is greater than or equal to . Let be a geodesic segment realizing the intrinsic diameter of . Thus, we can find disjoint balls , with , , and . Hence,
[TABLE]
Therefore, there exists such that:
[TABLE]
The first inequality follows from the Monotonicity Formula, Proposition 4.1 in the Appendix, applied to . This finishes the proof of the lemma. ∎
Let’s use the notation to represent the group acting on and its dependence on the parameter . By using the toroidal coordinate system for ,
[TABLE]
the action of on corresponds to the following action on :
[TABLE]
In these coordinates , the orbit at the point is given by:
[TABLE]
Lemma 3.3**.**
Given a sequence , there exist and a subsequence such that one of the following holds:
- (1)
For every , is becoming dense on as . 2. (2)
* is contained in integral curves of .*
Proof.
To prove the lemma it is enough to consider . If there is a subsequence for which the diameter of is going to zero as , then is clearly becoming dense on and item 1 is proved.
Let’s consider now the case where the diameter of in is bounded away from zero. From the equivalence between extrinsic and intrinsic distance and by Lemma 3.3 we conclude that the Euclidean injectivity radius satisfies . In particular, there exist such that
[TABLE]
Therefore, there exists such that infinitely often and is the Euclidean injectivity radius of at for this subsequence. Hence, the sub-orbit generated by the translation is contained in the line . It follows that the is contained in a union of equidistant lines parallel to the one described above by homogeneity. Modulo the number of such lines is finite, let’s denote it by . Modulo there are points of in each of these lines. Hence,
[TABLE]
Therefore, divides and is independent of . In other words, is contained in integral curves of . ∎
Theorem 1.1**.**
There exists a positive integer such that for every and every the isoperimetric surfaces in are either geodesic spheres or tori of revolution about geodesics.
Proof of Theorem 1.1.
Arguing by contradiction, let’s assume that there exists an infinite sequence of Lens spaces containing an isoperimetric surface of genus or for each .
We use the Cheeger-Gromov convergence for the sequence of Lens spaces:
Cheeger-Gromov Convergence : A sequence converges, in the sense of Cheeger-Gromov, to if the following two conditions hold true:
- (1)
There exists an exhaustion of by compacts , i.e. and . 2. (2)
There exists a family of diffeomorphism onto their images, , such that and in the topology.
We consider pointed manifolds with base points belonging to . By the Cheeger-Gromov compactness theorem we have that , where is a flat three manifold. The inclusion of into through the diffeomorphism is still denoted by .
Lemma 3.4**.**
Let as above. There exists a constant such that .
Proof.
Let be such that and define . Arguing by contradiction, let’s assume that . In local coordinates around we consider the surface on the Euclidean ball endowed with the rescaled metric . Therefore, converges to as . The surface now has the property that .
By the strong compactness for a sequence of isoperimetric surfaces with bounded second fundamental form, see Corollary 4.4 in the Appendix, there exists a subsequence converging to a properly embedded surface , the convergence is in the sense of graphs and with multiplicity one. Moreover, is also stable, i.e.:
[TABLE]
If is compact, then it has to be a round sphere by Alexandrov’s Theorem, which is a contradiction since strong convergence preserves topology. If is non-compact, then it has infinite area by the monotonicity formula: indeed, by Proposition 4.1 in the Appendix there exists a positive constant such that
[TABLE]
In particular, . As is properly embedded, it has infinite extrinsic diameter and the claim follows. Therefore, is totally geodesic by Da Silveira’s Theorem 4.6 in the Appendix, which is a contradiction since . ∎
Lemma 3.5**.**
Let as above, then is a flat manifold of rank at most one.
Proof.
Below we denote by . Let be the Clifford torus through enclosing a region . Under the scaling by we have that . If , then . Moreover, the second fundamental form of satisfies . The critical fiber is distant from by since is converging to a compact region in . Instead of using base points we choose new base points ; it follows that and . We claim that rank of is at most one:
[TABLE]
Let’s assume now that , consequently and . Recall the function , the distance from the Clifford torus through to the critical fiber with respect to the round metric. The unit vector field is orthogonal to for every and it is well defined on . Let be the geodesic whose velocity is and such that . Consider . By the triangle inequality under the metric . Applying the coarea formula for , , we obtain:
[TABLE]
where is from the mean value theorem for integrals. The last inequality is justified as follows. Either the extrinsic diameter of is going to infinity and is converging with multiplicity to a flat surface or the extrinsic diameter of is bounded. The former implies that . The latter implies that , which is a contradiction since . We have conclude that and rank of is at most one. ∎
The following lemma gives a description of for small volumes:
Lemma 3.6**.**
For large enough there exist and such that is given by the profile of spheres on and by the profile of flat tori on . Moreover, if is an isoperimetric surface such that , then .
Proof.
For each we consider the first volume, , for which there is transition on topology of isoperimetric surfaces from spheres to something else. If is the volume for which the profile of geodesic spheres intersect the profile of flat tori, then . The value of is computed by solving the following system of equations:
[TABLE]
The left hand sides (right hand sides) correspond to the enclosed volume and area of the Clifford torus (geodesic spheres of radius ), respectively. It follows that ; another way to see this is by recalling that the injectivity radius of is at every point. Therefore, .
Let be an isoperimetric surface with the property that . By Lemma 3.4 the sequence has bounded second fundamental form in ; thus, it strongly converges to a properly embedded surface of finite area in some orientable flat three manifold of rank at most one by Lemma 3.5. By the monotonicity formula, Proposition 4.1 in the Appendix, is a closed surface. It follows that the pre-image of in is contained in a solid cylinder. Hence, is an union of round spheres by Alexandrov’s Theorem or is a surface of revolution about the axis of the cylinder by Theorem 4.5 in the Appendix. Therefore, or . From the strong compactness for isoperimetric surfaces, see Corollary 4.4, we have that , and the existence of the desired . ∎
Claim**.**
Theorem 1.1 follows if we can show that the isoperimetric surfaces separating in two regions of the same volume are tori.
Proof.
By the strong compactness for isoperimetric surfaces, Corollary 4.4, there exists such that if is an isoperimetric surface enclosing volume , then is a flat torus. It follows from Lemma 3.6 and for large that the isoperimetric profile is given by the area of geodesic spheres for volumes in and by the area of flat tori for volumes in . In other words, if is the function defined by , where is the Clifford torus enclosing a volume equal to , then on . It follows that has a local maximum point at .
The claim will follow by exploring the weak differential equation for . From (2.6) we have
[TABLE]
Let be an isoperimetric surface such that . If is the unit normal variation of parametrized by the enclosed volume, then we define . Since , we have that has also a local maximum point at . Hence, , i.e., , and . Applying equation (2.6) for together with the Gauss equation and the Gauss-Bonnet theorem we obtain:
[TABLE]
Therefore, and in . ∎
By Lemma 3.3, the proof of Theorem 1.1 reduces to investigating the Cases I and II below.
Case I: There is a subsequence whose orbit of a point is contained in a finite number (independent of ) integral curves of a vector field .
We claim that the injectivity radius of at every point is . Indeed, let be the orbit of with respect to . As before, points of lie on the curve . Here, is the one parameter family of diffeomorphisms associated to :
[TABLE]
When ordered according the orientation of , those points determine a piecewise closed geodesic with . As , converges to . The claim now follows from :
[TABLE]
By the Cheeger-Gromov Compactness Theorem we obtain, up to subsequence, the following convergence:
[TABLE]
where is a flat three manifold of rank one by Lemma 3.5. By (3.3) we conclude that .
The curves represent integral curves of through ; they have bounded geodesic curvature and . Hence, the integral curves of converge to closed geodesics in under (3.4). As sets, they coincide with the standard fibers of .
By the Poincare-Hopf index theorem there exists a zero for the vector field since . Hence, we can choose the base points to satisfy , here is the unit normal vector of .
Lemma 3.7**.**
There exists a properly embedded surface such that with multiplicity one. Moreover, is totally geodesic and perpendicular to the standard fibers of .
Proof.
By Lemma 3.4 the sequence of isoperimetric surfaces has uniformly bounded second fundamental form. Applying the strong compactness theorem for isoperimetric surfaces, Corollary 4.4, we conclude that converges smoothly and with multiplicity one to a properly embedded stable CMC surface . If , then the monotonicity formula, Proposition 4.1, implies that the extrinsic diameter of and are bounded. This is impossible since the sequence separates in two regions of the same volume that goes to infinity as . Therefore, is a complete properly embedded stable CMC surface in with infinite area. Applying Da Silveira’s Theorem 4.6 once more, we obtain that is totally geodesic. As , we conclude that is orthogonal to the standard fibers of . ∎
We claim that separates . If it does not separate, then there exists a loop intersecting at a single point. As with multiplicity one, the same conclusion holds for , which contradicts the fact that separates . Therefore, there is such that , where is a flat plane for each .
Claim**.**
This configuration cannot be a limit of isoperimetric surfaces.
We regard as a slab in with height . Now, we construct a deformation of which decreases its area as follows. First, we cut off the solid cylinders obtained from the intersection of with a vertical solid torus of radius . To balance the enclosed volume we add a vertical solid torus of radius , see Figure 1 for the case . If is the distance between and , then the radius is given by:
[TABLE]
The boundary of this new region is denoted by and
[TABLE]
If is large enough, then has less area than . This is impossible since the strong multiplicity one convergence allow us to carry out this deformation of to which contradicts the fact that is an isoperimetric surface.
Case II: There is a subsequence where the orbit of a point is becoming dense on the Clifford torus containing such point.
We use geometric measure theory methods to analyse the pre-image sequence .
It is proved in [R2] that if has positive mean curvature, then
[TABLE]
Applying this formula to the sequence of isoperimetric surfaces, we conclude that the mean curvature of satisfy . We have used that separates into regions of the same volume.
As has area and mean curvature bounded, we apply Allard’s compactness theorem, Theorem 42.7 and Remark 42.8 in [S], to obtain an integral varifold that, up to subsequence, is . Recall that acts on via . We claim that is invariant: indeed, if and , then for each there is such that . On the other hand, as , there is such that and . It follows that and . In particular, where is a Clifford torus. The monotonicity formula implies that the convergence is also in Hausdorff distance; hence, we have that and . Since is invariant there exists for which . By taking the limit we obtain for some . As this is impossible, we conclude that and all are connected for large.
Now we consider , the space of 2-dimensional integral currents on . Each and . As is a region of finite perimeter ( is BV function with uniform bounded variation), then and as currents, is an open set of finite perimeter, see Theorem 6.3 and proof of Theorem 37.2 in [S]. Since we conclude that . Applying the Constancy theorem, Theorem 26.27 in [S], we conclude that is the handlebody bounded by the Clifford torus , and consequently .
We proved that for some positive integer . Since is isoperimetric, it follows that . Indeed,
[TABLE]
As is smooth, we have for sufficiently small that the density , where is from Theorem 4.2 in the Appendix. On the other hand, as is converging to with multiplicity one, then for large enough. Now we invoke the smooth version of Allard’s Regularity Theorem, Theorem 4.2, to concluded that the convergence is strong, i.e., graphical with multiplicity one. As strong convergence preserves topology, we conclude that . This completes the proof of Theorem 1.1. ∎
3.3. Berger Spheres
Let be the round metric on and the vector field on defined as . Recall that is tangent to the fibers of the Hopf fibration .
The Berger metrics are Riemannian metrics on defined as:
[TABLE]
The Riemannian manifolds are called the Berger spheres, they are denoted by . Geometrically, the metric shrinks the Hopf fibers to have length .
The Berger metrics are also homogeneous and their group of isometries has dimension four. It follows from the work of Abresch and Rosemberg [AR] that every constant mean curvature surface in admits a holomorphic quadratic differential. In particular, every CMC sphere in is rotationally invariant.
A precise study of closed orientable surfaces with constant mean curvature on the Berger spheres is given in [TU]. It is proved there the existence of with the following property: if , then every stable constant mean curvature surface in has genus zero or one. Moreover, if , then these stable CMC surfaces are totally umbilical spheres or the minimal Clifford torus, the latter only occurring when . In particular, rotationally invariant spheres are the only solutions of the isoperimetric problem in for .
Theorem 3.8**.**
There exists such that for every the isoperimetric surfaces in the Berger spheres are either rotationally invariant spheres or tori.
Proof.
Let’s assume that for every there exists an isoperimetric surface with or .
We rescale the metric of by the factor . The Hopf fibers have constant length equal to under the new metric . It follows that the injective radius of at a point is equal to for every .
Since is a local trivial fibration, we have that for each there exist a neighbourhood of and a diffeomorphism such that , where given by . Moreover, in the topology. Therefore, in the sense of Cheeger-Gromov we have:
[TABLE]
We pick the points with the property that , this means and are parallel at . These points exist by the Poincaré-Hopf index theorem. By Lemma 3.4 the inclusion of in \big{(}\mathbb{S}^{1}\times\mathbb{R}^{2},\phi_{\varepsilon}^{*}(\varepsilon^{-2}g_{\varepsilon})\big{)} has the following property:
[TABLE]
By the strong compactness theorem for isoperimetric surfaces, Corollary 4.4 in the Appendix, we can extract a subsequence, , which converges with multiplicity one to a properly embedded surface
If , then the monotonicity formula, Proposition 4.1, implies that is compact. We apply Theorem 4.5 to conclude that is either a round sphere or torus. This is impossible since we have strong convergence and . Therefore, is a complete non-compact surface with infinite area. Moreover, is also a stable CMC surface in :
[TABLE]
It follows from Theorem 4.6 that is totally geodesic. By the choice of we conclude that is orthogonal to the fibers of . Since separates , we also conclude that is an union of at least two totally geodesic planes. As shown in the proof of Theorem 1.1, this configuration cannot be a limit of isoperimetric surfaces. ∎
4. Appendix
In this Appendix we collect some background results for surfaces with constant mean curvature in 3-manifolds.
Proposition 4.1**.**
Let be a three manifold with bounded curvature, , and with positive lower bound on the injectivity radius . If is a smooth surface with mean curvature which satisfies , then there exists a positive constant such that
[TABLE]
for every and .
Proof.
See Chapter 7 in [CM]. ∎
Let be a CMC surface in a closed manifold . The density of at is given by
[TABLE]
Theorem 4.2** (Allard’s Regularity Theorem).**
Let be a closed manifold and . There exist and with the following property: if is a smooth embedded CMC surface satisfying
[TABLE]
for every and , then its second fundamental form is uniformly bounded, i.e., .
Proof.
See Theorem 1.1 in [W]. ∎
Let be a sequence of surfaces in a manifold . We say that converge to in the sense of graphs if near any point and for large the surface is locally a graph over an open set of and these graphs converge smoothly to the graph of . In addition, we say that satisfy local area bounds if there exist and such that for every .
A hypersurface is said to be weakly embedded if it admits only tangential self intersections.
Proposition 4.3**.**
Let be a sequence of embedded surfaces with constant mean curvature satisfying local area bounds and such that . Let’s assume that converges to a metric in the topology. If has an accumulation point, then we can extract a subsequence that converges to a properly weakly embedded CMC surface in .
Sketch of the Proof..
Let’s first recall the constant mean curvature equation for graphs. If is a surface with constant mean curvature in , then can be written locally as a graph over a neighbourhood :
[TABLE]
In coordinates where is the coordinate base associated to . Let be the coordinate base for , i.e., . The induced metric is expressed by . A simple computation gives:
[TABLE]
We also have
[TABLE]
where are the Christoffel symbols of . Therefore,
[TABLE]
Finally, the mean curvature equation is written as:
[TABLE]
Since and , then . The equation (4.2) is uniformly elliptic as long as .
Let be an accumulation point for the sequence . By the upper bound on the second fundamental form, , there exists such that for every we have that is locally a graph over a neighbourhood . Moreover, there exists for which . As , the Schauder estimates for solutions of elliptic equations, see [GT], imply that have estimates on , i.e., . Therefore, are uniformly bounded and equicontinuous.
As satisfy local area bounds, then . On the other hand, the monotonicity formula, Proposition 4.1, gives that , where is a connected component of . It follows that the number of components of is finite and independent of . By the Arzelà-Ascoli theorem we can extract a subsequence for which converges to for every . Moreover, also satisfies the constant mean curvature equation (4.2). As the set of accumulation points of is compact in we can cover this set by finite balls with . Repeating the arguments in each of these balls and applying a diagonal argument we obtain a properly immersed surface on with constant mean curvature . Since the surfaces are embedded, it follows that does not cross itself though it may have tangential self-intersections. Therefore, is properly weakly embedded in . ∎
Corollary 4.4**.**
Let be a sequence of isoperimetric surfaces with . Assume that converges, in the sense of Cheeger-Gromov, to a three manifold . There exists a properly embedded surface such that in the sense of graphs and the convergence is with multiplicity one.
Sketch of the Proof..
First we remark that satisfy local area bounds. Indeed, . By Proposition 4.3 we only need to rule out possibly multiplicities for the convergence and points where fails to be embedded.
If the multiplicity of the limit is bigger than two, then has several components getting arbitrarily close. This allow us to do a local cut and past deformation, as shown in Figure 2, that preserves the enclosed volume. If is the Euclidean metric, then and . Thus, if , then
[TABLE]
The deformation needed for the multiplicity two case is shown in Figure 3. The constraint on the enclosed volume implies that . Hence, if , then
[TABLE]
The construction to deal with points where has tangential self intersections is similar to the multiplicity two case. The corollary now follows since these constructions contradict the fact that is isoperimetric for every . ∎
Theorem 4.5** (Korevaar-Kusner-Solomon).**
If is a complete CMC surface properly embedded in a solid cylinder in , then is rotationally symmetric with respect to a line parallel to the axis of the cylinder.
Proof.
See [KKS]. ∎
Theorem 4.6** (Da Silveira).**
Let be a complete orientable surface conformally equivalent to a compact Riemann surface punctured at a finite number of points. Let be an operator on satisfying and . If has infinite area, then there exists a piecewise smooth function with compact support such that
[TABLE]
Proof.
See [DS]. ∎
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[A] F. J. Almgren. Existence and regularity almost everywhere of solutions to elliptic variational problems with constraints , Mem. AMS 165 (1976).
- 2[AR] U. Abresch and H. Rosenberg. Generalized Hopf differentials . Mat. Contemp. 28 (2005), 1-28.
- 3[B] H. Bray, The Penrose inequality in general relativity and volume comparison theorems involving scalar curvature (thesis). ar Xiv:0902.3241 v 1, (1998).
- 4[BC] J.L. Barbosa and M. do Carmo. Stability of hypersurfaces with constant mean curvature , Math. Z., 185, 339-353, 1984.
- 5[BCE] J.L. Barbosa, M. do Carmo, and J. Eschenburg. Stability of hypersurfaces with constant mean curvature in Riemannian manifolds , Math. Z., 197, 123-138, 1988.
- 6[BM] H. Bray and F. Morgan. An isoperimetric comparison theorem for Schwarzschild space and other manifolds , Proc. Amer. Math. Soc. 130:5 (2002), 1467-1472.
- 7[BP] C. Bavard and P. Pansu. Sur le volume minimal de R 2 superscript 𝑅 2 R^{2} , Ann. Sci. Ecole Norm. Sup. (4) 19 (1986), 479-490.
- 8[C] B.Y. Chen. Geometry of submanifolds . Pure and Applied Mathematics, No. 22. Marcel Dekker, Inc., New York, 1973. vii+298 pp.