Orthogonal Polynomials related to g-fractions with missing terms
Kiran Kumar Behera, A. Swaminathan

TL;DR
This paper explores structural and qualitative properties of perturbed g-fractions, introducing gap g-fractions and analyzing their relation to hypergeometric functions and Pick functions.
Contribution
It introduces the concept of gap g-fractions and investigates their properties under different perturbations of g-parameters.
Findings
Introduction of gap g-fractions concept
Analysis of perturbations using tail sequences and Schur fractions
Identification of some Pick functions within the class
Abstract
The purpose of the present paper is to investigate some structural and qualitative aspects of two different perturbations of the parameters of -fractions. In this context the concept of \emph{gap} -fractions is introduced. While tail sequences of a continued fraction play a significant role in the first perturbation, Schur fractions are used in the second perturbation of the -parameters that are considered. Illustrations are provided using Gaussian hypergeometric functions. Using a particular gap -fraction, some members of the class of Pick functions are also identified.
Click any figure to enlarge with its caption.
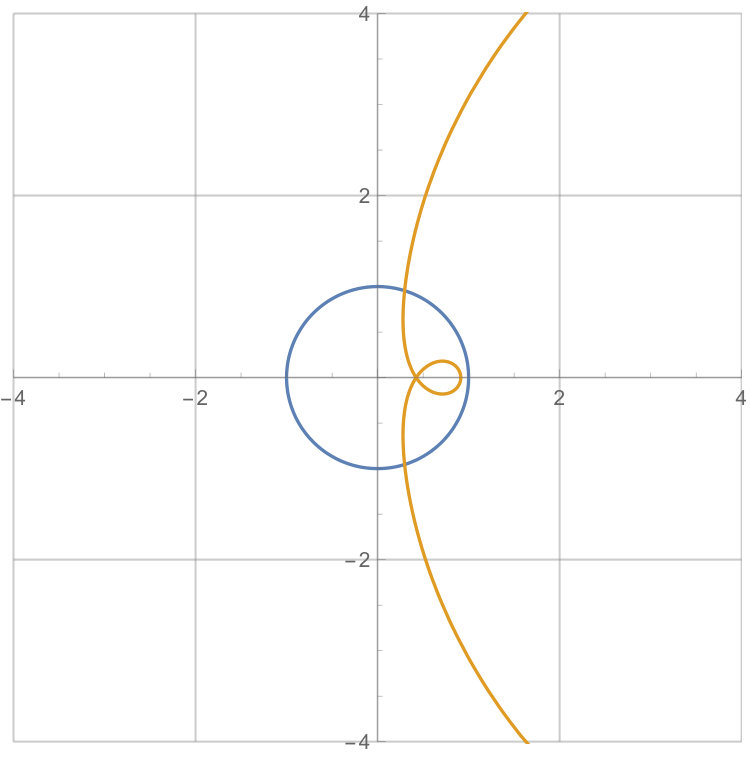 Figure 1
Figure 1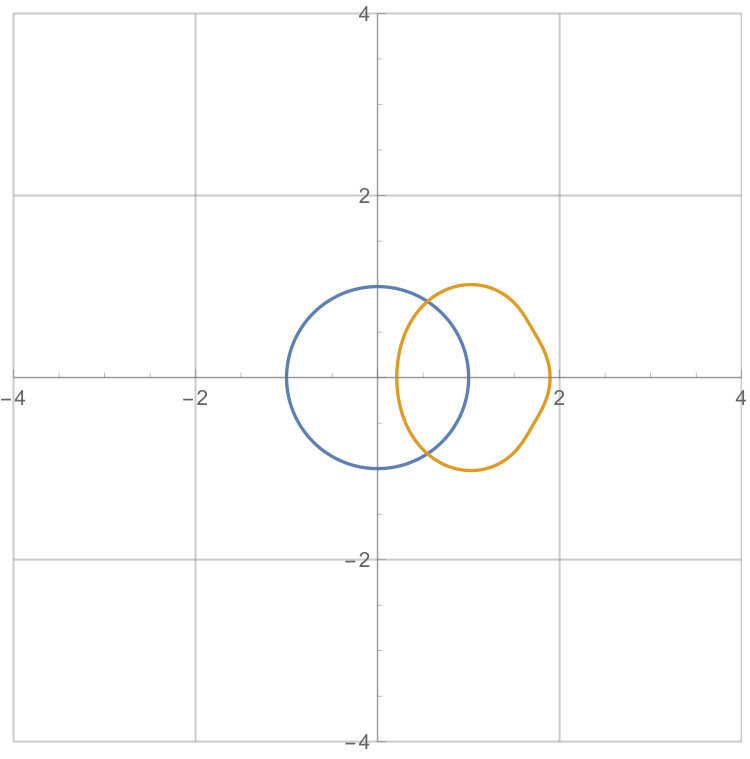 Figure 2
Figure 2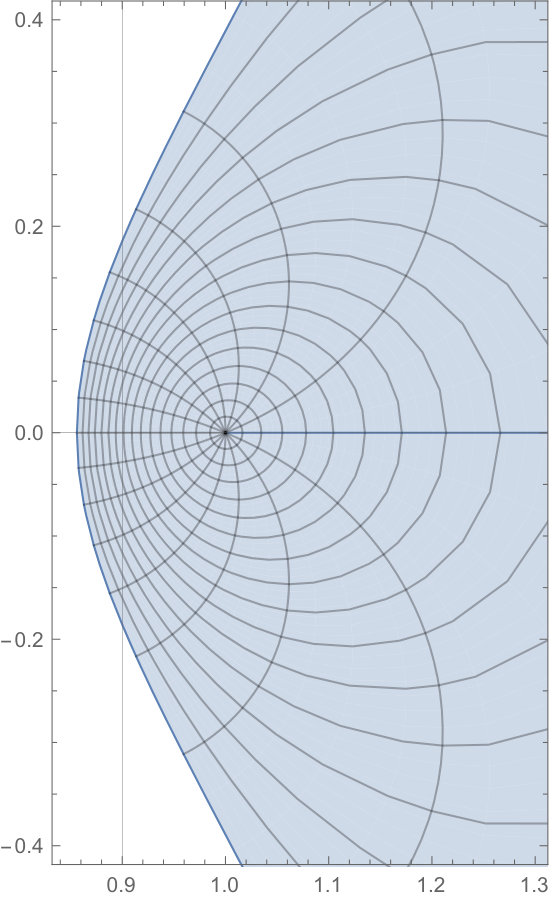 Figure 3
Figure 3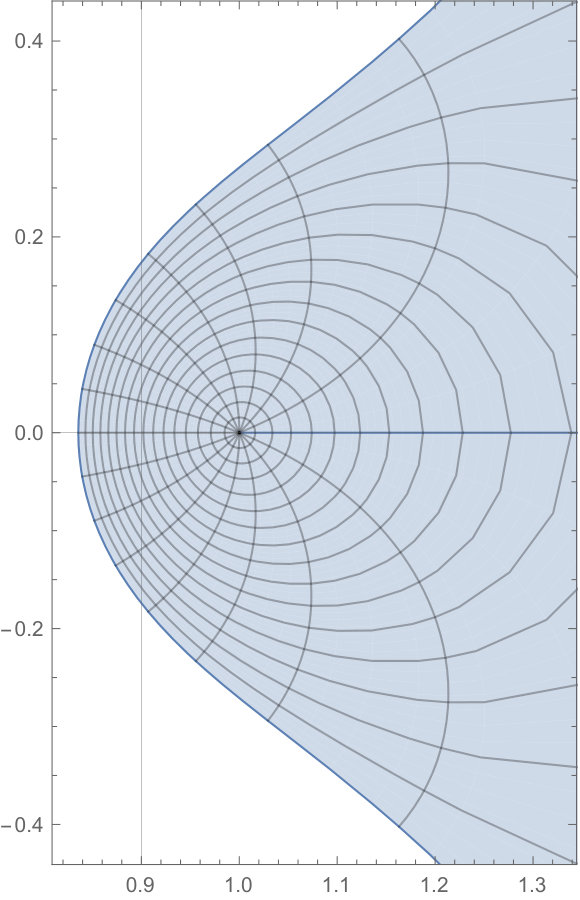 Figure 4
Figure 4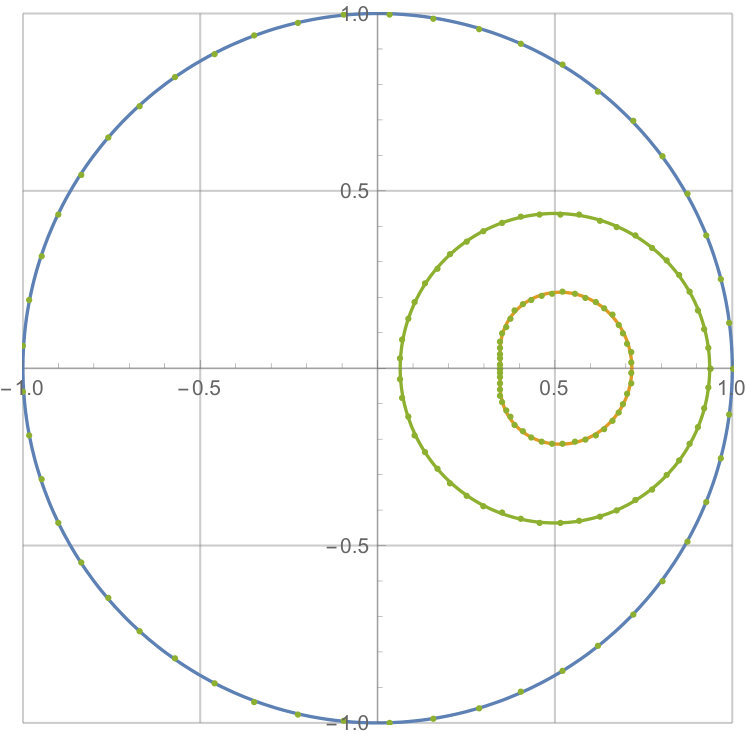 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMathematical functions and polynomials · Analytic and geometric function theory · Advanced Mathematical Identities
Orthogonal Polynomials related to -fractions with missing terms
Kiran Kumar Behera
Department of Mathematics
Indian Institute of Technology Roorkee-247 667, Uttarakhand, India
and
A. Swaminathan
Department of Mathematics
Indian Institute of Technology Roorkee-247 667, Uttarakhand, India
[email protected], [email protected]
Abstract.
The purpose of the present paper is to investigate some structural and qualitative aspects of two different perturbations of the parameters of -fractions. In this context the concept of gap -fractions is introduced. While tail sequences of a continued fraction play a significant role in the first perturbation, Schur fractions are used in the second perturbation of the -parameters that are considered. Illustrations are provided using Gaussian hypergeometric functions. Using a particular gap -fraction, some members of the class of Pick functions are also identified.
Key words and phrases:
Schur functions, Carathéodory function, -fractions, Subordination, Gaussian hypergeometric functions, Pick functions
1. Introduction
Given an arbitrary real sequence , a continued fraction expansion of the form
[TABLE]
is called a -fraction if the parameters , . It terminates and equals a rational function if for some . If , , the -fraction (1.9) still converges uniformly on every compact subsets of the slit domain (see [24, Theorem 27.5] and [11, Corollary 4.60]), and in this case, (1.9) will represent an analytic function, say .
Such -fractions are found having applications in diverse areas like number theory [21], dynamical systems [22], moment problems and analytic function theory [2, 12, 13]. In particular, [24, Theorem 69.2], the Hausdorff moment problem
[TABLE]
has a solution if and only if (1.9) corresponds to a power series of the form , . Further, the -fractions have also been used to study the geometric properties of ratios of Gaussian hypergeometric functions as well as their -analogues, (see the proofs of [12, Theorem 1.5] and [2, Theorem 2.2]). Among several such results, one of the most fundamental result concerning -fraction is [24, Theorem 74.1] in which holomorphic functions having positive real part in are characterised. Precisely, is positive if and only if has a continued fraction expansion of the form (1.9). Moreover, has the integral representation
[TABLE]
where is a bounded non-decreasing function having a total increase 1.
Many interesting results are also available in literature if we consider subsets of . For instance, let be the class of holomorphic functions having a positive real part on the unit disk . Such functions denoted by are called Carathéodory functions and have the Riesz-Herglotz representation [24, Theorem 73.1]
[TABLE]
where =. Further, if is such that and normalised by , then the following continued fraction expansion can be derived [23]
[TABLE]
where . Note that here .
Closely related to the Carathéodory functions are the Schur functions given by
[TABLE]
From (1.19), it is clear that maps the unit disk to the closed unit disk . In fact, if
[TABLE]
(1.19) describes a one-one correspondence between the classes of holomorphic functions and . The class studied by J. Schur [17], is the well-known Schur algorithm. This algorithm generates a sequence of rational functions from a given sequence of complex numbers lying in . Then, with , , satisfying some positivity conditions, , , where is a Schur function [9].
It is interesting to note that , where . Moreover, using these parameters , the following Schur fraction can be obtained [9]
[TABLE]
where is related to the occurring in (1.18) by , . Similar to -fractions the Schur fraction also terminates if for some . It may be noted that such a case occurs if and only if is a finite Blashke product [9].
Let and denote the partial numerator and denominator of (1.30) respectively. Then, with the initial values , , and , the following recurrence relations hold [9]
[TABLE]
[TABLE]
[TABLE]
The relations (1) and (1) are sometimes written in the more precise matrix form as
[TABLE]
It is also known that [16]
[TABLE]
Here, and in what follows, for any polynomial with complex coefficients and of degree . From (1), it follows that
[TABLE]
Further, the even approximants of the Schur fraction (1.30) coincide with the the approximant of the Schur algorithm, so that converges to the Schur function as .
From the point of view of their applications, it is obvious that the parameters of the -fraction (1.9) contain hidden information about the properties of the dynamical systems or the special functions they represent. One way to explore this hidden information is through perturbation; that is, through a study of the consequences when some disturbance is introduced in the parameter sequence . The main objective of the present manuscript is to study the structural and qualitative aspects of two perturbations. The first is when a finite number of parameters ’s are missing in which case we call the corresponding -fraction as a gap--fraction. The second case is replacing by a new sequence in which the term is replaced by . The first case is illustrated using Gaussian hypergeometric functions, where we use the fact that many -fractions converge to ratios of Gaussian hypergeometric functions in slit complex domains. The second case is studied by applying the technique of coefficient stripping [18] to the sequence of Schur parameters . This follows from the fact that the Schur fraction and the -fraction are completely determined by the related Schur parameters ’s and the -parameters respectively, and that a perturbation in produces a unique change in the and vice-versa.
The manuscript is organised as follows. Section 2 provides structural relations for the three different cases provided by the gap -fraction. A particular ratio of Gaussian hypergeometric functions is used to illustrate the results. The modified -fractions given in Section 2 has a shift in to and so on for any fixed . Instead, the effect of changing to any another value is discussed in Section 3. Illustrations of the results obtained in Section 2 leading to characterization of a class of ratio of hypergeometric functions such as Pick functions is outlined in Section 4.
2. Gap -fractions and structural relations
As the name suggests, gap--fractions correspond to the -sequence with missing parameters. We study three cases in this section and in each the concept of tail sequences of a continued fraction plays an important role. For more information on the tails of a continued fraction, we refer to [14, Chapter II].
For , let be the continued fraction (1.9) and
[TABLE]
Note that (2) is obtained from (1.9) by removing for some arbitrary which cannot be obtained by letting . Let,
[TABLE]
so that is the tail of . We note that [14, Theorem 1, p.56], the existence of guarantees the existence of . Further, if
[TABLE]
then, from (2) and (2.18) we obtain the rational function
[TABLE]
It is known [11, Theorem 2.1], that the approximant of (1.9) is given by the rational function
[TABLE]
and that
[TABLE]
Then,
[TABLE]
where the last equality follows from [11, eqn.(2.1.9)]. Denoting , , we have from (2.23)
[TABLE]
Note 1**.**
In the sequel, by we will mean the unperturbed -fraction as given in (1.9) with , . Further, as the notation suggests, the rational function is independent of the parameter and is known whenever is given. The information of the missing parameter at the position is stored in and hence the notation .
It may also be noted that the polynomials can be easily computed from the Wallis recurrence [11, eqn. (2.1.6)]
[TABLE]
with the initial values . Thus, we state our first result.
Theorem 2.1**.**
Suppose is given. Let denote the perturbed -fraction in which the parameter is missing. Then, with ,
[TABLE]
where , and are respectively, the partial denominator, the approximant and the tail of .
It may be observed that the right side of (2.24) is of the form
[TABLE]
with being well defined polynomials. Rational functions of such form are said to be rational transformation of and occur frequently in perturbation theory of orthogonal polynomials. For example, see [7, 25].
A similar result for the perturbed -fraction in which a finite number of consecutive parameters are missing can be obtained by an analogous argument that is stated directly as
Theorem 2.2**.**
Let be given. Let denote the perturbed -fraction in which the l consecutive parameters are missing. Then,
[TABLE]
where is the tail of .
The next result is about the perturbation in which only two parameters and are missing, where need not be .
Theorem 2.3**.**
Let be given. Let denote the perturbed -fraction in which two parameters and are missing, where we assume , . Then
[TABLE]
where is the perturbed tail of in which is missing and is given by
[TABLE]
where and are respectively, the partial denominator and approximant of the tail of . Here, is the tail of .
Proof.
Let
[TABLE]
so that is the perturbed tail of in which is missing. Then we can write
[TABLE]
where . Now, proceeding as in Theorem 2.1, we obtain
[TABLE]
Hence all that remains is to find the expression for or .
Now, let
[TABLE]
and . From (2.35) and [14, eqn.(1.1.4), p.57], we have
[TABLE]
It is clear that, the rational function is the approximant of the tail of . Then, using [14, eqn. (1.1.6), p. 57] we obtain
[TABLE]
Finally, using the fact that , we obtain
[TABLE]
where
[TABLE]
is the approximant of the tail of . ∎
As mentioned earlier, from (2.24), (2.2) and (2.26), it is clear that tail sequences play a significant role in deriving the structural relations for the gap -fractions. We now illustrate the role of tail sequences using particular -fraction expansions.
2.1. Tail sequences using hypergeometric functions
The Gaussian hypergeometric function, with the complex parameters , and is defined by the power series
[TABLE]
where and is the Pochhammer symbol.
Two hypergeometric functions and are said to be contiguous if the difference between the corresponding parameters is at most unity. A linear combination of two contiguous hypergeometric functions is again a hypergeometric function. Such relations are called contiguous relations and have been used to explore many hidden properties of the hypergeometric functions; for example, many special functions can be represented by ratios of Gaussian hypergeometric functions. For more details, we refer to [1].
Consider the Gauss continued fraction [24, p. 337] (with and )
[TABLE]
where
[TABLE]
Let , . We aim to find the ratio of hypergeometric functions given by the continued fraction
[TABLE]
For this, first note that from (2.44), we can write
[TABLE]
Now, replacing and in the contiguous relation [24, eqn. 89.6, p. 336] we obtain
[TABLE]
Hence, with , we have
[TABLE]
where the last equality follows from the relation
[TABLE]
which is easily proved by comparing the coefficients of on both sides. Finally, using the well known result [24, eqn. 75.3, p. 281], we obtain
[TABLE]
Note that the continued fraction (2.55) has also been derived by different means in [12] and studied in the context of geometric properties of hypergeometric functions.
For further analysis, we establish the following formal continued fraction expansion:
[TABLE]
Suppose for now, the left hand side of (2.64) is denoted by . Again using, Gauss continued fraction [24, eqn. 89.9, p. 337] with and , we arrive at
[TABLE]
In the relation (2.45), interchanging and and then replacing and , we get
[TABLE]
which implies
[TABLE]
As mentioned, the right hand side is only a formal expansion for the left hand side in (2.64). However, note the fact that the sequence ,
[TABLE]
satisfies the difference equation
[TABLE]
where
[TABLE]
Thus, using [14, Theorem 1, pp. 295-296], we can conclude that the right side of (2.64) indeed corresponds as well as converges to the left side of (2.64), which we state as
Proposition 2.1**.**
The following correspondence and convergence properties hold.
- (i)
With , , complex constants,
[TABLE] 2. (ii)
The continued fraction on the right side of (2.64) converges to the meromorphic function in the cut-plane where and . The convergence is uniform on every compact subset of .
We would like to mention here that the polynomial sequence corresponding to and that arises during the discussion of the convergence of Gauss continued fractions [14, p. 294] is given by
[TABLE]
Also note that the continued fraction used in the right side of (2.74) is
[TABLE]
Here, we recall that , , where are the parameters appearing in the Gauss continued fraction (2.44). The following result gives a kind of generalization of Proposition 2.1. The correspondence and convergence properties of the continued fractions involved can be discussed similar to the one for .
Proposition 2.2**.**
Let,
[TABLE]
Then,
[TABLE]
Proof.
The case has already been established in Proposition 2.1.
Comparing the continued fractions for and , , it can be seen that can be obtained for by shifting , and .
For , , we note that the continued fraction in right side of (2.83) is nothing but the Gauss continued fraction [24, eqn. 89.9, p. 337] with the shifts , and in the parameters. ∎
Instead of starting with , as the first partial numerator term in the continued fraction (2.83), a modification by inserting a new term changes the hypergeometric ratio given in Proposition 2.2, thus leading to interesting consequences. We state this result as follows.
Theorem 2.4**.**
Let
[TABLE]
Then,
[TABLE]
Proof.
Denoting,
[TABLE]
we find from [24, eqn. 75.3, p. 281],
[TABLE]
Hence, we need to derive the functions . For , , using (2.45) and , we find that
[TABLE]
Shifting , and in (2.46), we find that
[TABLE]
so that
[TABLE]
Repeating the above steps, we find that for , and , ,
[TABLE]
so that
[TABLE]
∎
For particular values of , further properties of the ratio of hypergeometric function can be discussed. One particular case and few ratios of hypergeometric functions are given in Section 4 with some properties. Before proving such specific case, we consider another type of perturbation in -fraction in the next section.
3. Perturbed Schur parameters
As mentioned in Section 1, the case of a single parameter being replaced by can be studied using the Schur parameters. It is obvious that this is equivalent to studying the perturbed sequence , where
[TABLE]
Hence, we start with a given Schur function and study the perturbed Carathéodory function and its corresponding -fraction. The following theorem gives the structural relation between the Schur function and the perturbed one. The proof follows the transfer matrix approach, which has also been used earlier in literature (see for example [3, 4]).
Theorem 3.1**.**
Let and be the partial numerators and denominators of the Schur fraction associated with the sequence . If and are the partial numerators and denominators of the Schur fraction associated with the sequence as defined in (3.3), then the following structural relations hold for , .
[TABLE]
where the entries of the transfer matrix are given by
[TABLE]
with
[TABLE]
Proof.
Let
[TABLE]
Then the matrix relation (1.40) can be written as
[TABLE]
with
[TABLE]
From (3.3), it is clear that
[TABLE]
Defining the associated polynomials of order as
[TABLE]
we have
[TABLE]
where denotes the matrix inverse of . Now, using (3) and (3.11) in (3.10), we get
[TABLE]
Again from (3),
[TABLE]
which means
[TABLE]
Using (3.13) in (3.12), we get
[TABLE]
which implies
[TABLE]
where denotes the matrix transpose of . After a brief calculation, and using the relations (1), it can be proved that the product precisely gives the transfer matrix leading to (3.8). ∎
As an important consequence of Theorem (3.1), we have,
[TABLE]
which implies,
[TABLE]
This gives the perturbed Schur function as,
[TABLE]
We next consider a non-constant Schur function of the form where and have a perturbation . Then
[TABLE]
The matrix entries are
[TABLE]
The transformed Schur function is a rational function given by
[TABLE]
where
[TABLE]
and
[TABLE]
This leads to the following easy consequence of Theorem 3.1.
Corollary 3.1**.**
Let , where denote the class of Schur functions. Then with the perturbation , the resulting Schur function is the rational function given by
[TABLE]
We now consider an example illustrating the above discussion.
Example 3.1**.**
Consider the sequence of Schur parameters given by and , . Then, as in [9, Example 6.3], the Schur function is with
[TABLE]
We study the perturbation . For the transfer matrix , the following polynomials are required.
[TABLE]
The entries of are
[TABLE]
Hence, the transformed Schur function using (3.15) is
[TABLE]
Observe that and are analytic in with and
[TABLE]
where is analytic in with . Further, by Schwarz lemma for unless is a pure rotation. In such a case the range of is contained in the range of . The function is said to be subordinate to and written as for [6, Chapter 6].
We plot the ranges of both the Schur functions below.
In Figure 1, the outermost circle is the unit circle while the middle one is the image of under which is again a circle with center at 1/2. The innermost figure is the image of under .
3.1. The change in Carathéodory function
Let the Carathéodory function associated with the perturbed Schur function be denoted by . Then, using (3.14), we can write
[TABLE]
Further, using the relation (1.19), we have
[TABLE]
where
[TABLE]
As an illustration, for the Schur function , it is easy to verify that
[TABLE]
We plot these Carathéodory functions below.
In Figures 2(a) and 2(b), the ranges of both the original and perturbed Carathéodory functions are plotted for . Interestingly, the range of is unbounded (Figure 2(a)) which is clear as is a pole of . However has simple poles at 5/2 and and hence with the use of perturbation we are able to make the range bounded (Figure 2(b)).
As shown in [23], the sequence satisfying the recurrence relation
[TABLE]
where and are the Schur parameters plays an important role in the -fraction expansion for a special class of Carathéodory functions. Let correspond to the perturbed Carathéodory function . Since only is perturbed, it is clear that remains unchanged for . The first change, to , occurs when is replaced by . Consequently, , , change to , , respectively. We now show that can be expressed as a bilinear transformation of for .
Theorem 3.2**.**
Let be the sequence corresponding to and that to . Then,
[TABLE]
where
- (i)
, (j=1). 2. (ii)
For ,
[TABLE]
Proof.
Consider first the expression
[TABLE]
Substituting and the given values of and , it simplifies to
[TABLE]
Since , (3.19) is proved for .
Next, let
[TABLE]
Substituting first the given values of and , the numerator becomes
[TABLE]
and then using, ,
[TABLE]
With similar calculations, we obtain
[TABLE]
This means
[TABLE]
where , thus proving (3.19) for . The remaining part of the proof is follows by a simple induction on . ∎
Remark 3.1**.**
With the condition , it is clear that (3.18) gives analytic self-maps of the unit disk. Similar to the changes in mapping properties obtained as a consequence of perturbation, it is expected that (3.19) may lead to interesting results in fractal geometry and complex dynamics.
Remark 3.2**.**
Since and are related by a bilinear transformation, it is clear that the expressions for and , , are not unique.
It is known that if is real for real , then the are real and , . Further, it is clear from (3.19) that whenever . In this case, the following -fraction is obtained for .
[TABLE]
where , , and .
4. A class of Pick functions and Schur functions
Let the Hausdorff sequence with be given so that there exists a bounded non-decreasing measure on [0,1] satisfying
[TABLE]
By [24, Theorem 69.2], the existence of is equivalent to the power series
[TABLE]
having a continued fraction expansion of the form
[TABLE]
where and , . Such functions are analytic in the slit domain and belong to the class of Pick functions. We note that the Pick functions are analytic in the upper half plane and have a positive imaginary part [5].
In the next result, we characterize some members of the class of Pick functions using the gap -fraction . The proof is similar to that of [12, Theorem 1.5] and follows from [12, Lemma 3.1], given earlier as [15, Corollary 2.1].
Theorem 4.1**.**
If with and , then the functions
[TABLE]
*are analytic in and each function map both the open unit disk and the half plane univalently onto domains that are convex in the direction of the imaginary axis. *
We would like to note here that by a domain convex in the direction of imaginary axis, we mean that every line parallel to the imaginary axis has either connected or empty intersection with the corresponding domain [6], (see also [2, 12]. ).
Proof of Theorem 4.1.
With the given restrictions on , and , has a -fraction expansion and hence by [24, Theorem 69.2], there exists a non-decreasing function with a total increase of 1 and
[TABLE]
which implies
[TABLE]
Now, if we define
[TABLE]
where , it can be easily seen that is again a non-decreasing map with . Further, using the contiguous relation
[TABLE]
we obtain
[TABLE]
and hence
[TABLE]
Further, noting that the coefficient of in is , we define
[TABLE]
and find that
[TABLE]
Finally from Gauss continued fraction (2.44), we conclude that has a -fraction expansion and so there exists a map which is non-decreasing, and
[TABLE]
Defining for
[TABLE]
so that , and using the fact that the coefficient of in is , we obtain
[TABLE]
Thus, with , , satisfying the conditions of [12, Lemma 3.1], [15, Corollary 2.1], the proof of the theorem is completed. ∎
Remark 4.1**.**
Ratios of Gaussian hypergeometric functions having mapping properties described in Theorem 4.1 are also found in [12, Theorem 1.5] but for the ranges and . Hence for the common range and , two different ratios of hypergeometric functions belonging to the class of Pick functions can be obtained leading to the expectation of finding more such ratios for every possible range.
It may be noted that the ratio of Gaussian hypergeometric functions in (2.55) denoted here as has the mapping properties given in Theorem 4.1, which is proved in [12, Theorem 1.5]. We now consider its -fraction expansion with the parameter missing. Using the contiguous relation (4.1) and the notations used in Theorems 2.1 and 2.4, it is clear that and
[TABLE]
Then
[TABLE]
Then, from Theorem 2.1,
[TABLE]
which implies
[TABLE]
that is is given as a rational transformation of a new ratio of hypergeometric functions. It may also be noted that for and , [12, Theorem 1.5], both and will map both the unit disk and the half plane univalently onto domains that are convex in the direction of the imaginary axis.
As an illustration, we plot both these functions in figures (3(a)) and (3(b)).
4.1. A class of Schur functions
From Theorem 2.4 we obtain
[TABLE]
where the last equality follows from the contiguous relation (4.1) Hence using [23, eqns. 3.3 and 5.1] we get
[TABLE]
where is the Schur function and and are related as . Similarly, interchanging and in (4.1) we obtain
[TABLE]
where .
Moreover, using the relation , , the related sequence of Schur parameters is given by
[TABLE]
We note the following particular case. For and , the resulting Schur parameters are , . Such parameters have been considered in [19] (when ) in the context of orthogonal polynomials on the unit circle. These polynomials are known in modern literature as Szegö polynomials and we suggest the interested readers to refer [20] for further information.
Finally, as an illustration we note that while the Schur function associated with the parameters is , that associated with the parameters is given by
[TABLE]
where .
We remark that in this section, specific illustration of the results given in Section 2 are discussed leading to characterizing a class of ratio of hypergeometric functions. Similar characterization of functions involving the function , given in Section 3 may provide some important consequences of such perturbation of -fractions.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] G. E. Andrews, R. Askey and R. Roy, Special functions , Encyclopedia of Mathematics and its Applications, 71, Cambridge Univ. Press, Cambridge, 1999.
- 2[2] Á. Baricz and A. Swaminathan, Mapping properties of basic hypergeometric functions, J. Class. Anal. 5 (2014), no. 2, 115–128.
- 3[3] K. Castillo, On perturbed Szegő recurrences, J. Math. Anal. Appl. 411 (2014), no. 2, 742–752.
- 4[4] K. Castillo, F. Marcellán and J. Rivero, On co-polynomials on the real line, J. Math. Anal. Appl. 427 (2015), no. 1, 469–483.
- 5[5] W. F. Donoghue, Jr., The interpolation of Pick functions, Rocky Mountain J. Math. 4 (1974), 169–173
- 6[6] P. L. Duren, Univalent functions, Grundlehren der Mathematischen Wissenschaften, 259, Springer-Verlag, New York(1983).
- 7[7] L. Garza and F. Marcellán, Szegő transformations and rational spectral transformations for associated polynomials, J. Comput. Appl. Math. 233 (2009), no. 3, 730–738.
- 8[8] M. E. H. Ismail, E. Merkes and D. Styer, A generalization of starlike functions, Complex Variables Theory Appl. 14 (1990), no. 1-4, 77-84.