Invariant incompressible surfaces in reducible 3-manifolds
Christoforos Neofytidis, Shicheng Wang

TL;DR
This paper investigates how the mapping class group influences invariant incompressible surfaces in reducible 3-manifolds and characterizes when such manifolds admit Anosov tori.
Contribution
It provides a classification of reducible 3-manifolds admitting Anosov tori based on their prime summands, answering a specific open question.
Findings
A reducible 3-manifold admits an Anosov torus iff a prime summand is the 3-torus, the mapping torus of -id, or a hyperbolic automorphism.
The study links the mapping class group action to the existence of special invariant surfaces.
The paper characterizes the structure of invariant incompressible surfaces under self-homeomorphisms.
Abstract
We study the effect of the mapping class group of a reducible 3-manifold on each incompressible surface that is invariant under a self-homeomorphism of . As an application of this study we answer a question of F. Rodriguez Hertz, M. Rodriguez Hertz and R. Ures: A reducible 3-manifold admits an Anosov torus if and only if one of its prime summands is either the 3-torus, the mapping torus of , or the mapping torus of a hyperbolic automorphism.
Click any figure to enlarge with its caption.
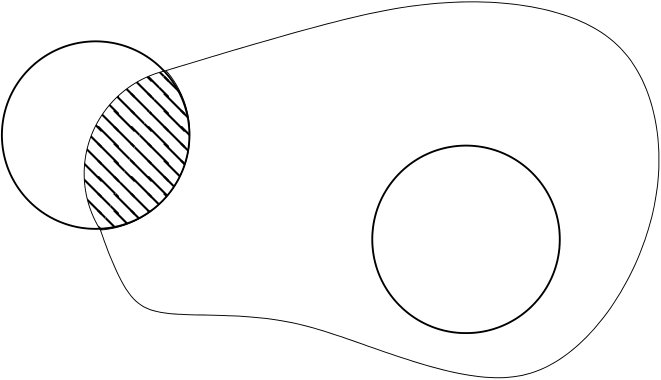 Figure 1
Figure 1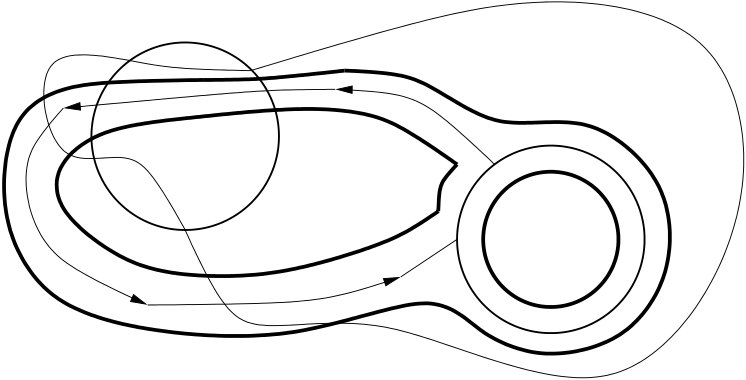 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Invariant incompressible surfaces in reducible 3-manifolds
Christoforos Neofytidis
Department of Mathematical Sciences, SUNY Binghamton, Binghamton NY 13902-6000, USA
and
Shicheng Wang
Department of Mathematics, Peking University, Beijing 100871, China
(Date: March 13, 2024)
Abstract.
We study the effect of the mapping class group of a reducible 3-manifold on each incompressible surface that is invariant under a self-homeomorphism of . As an application of this study we answer a question of F. Rodriguez Hertz, M. Rodriguez Hertz and R. Ures: A reducible 3-manifold admits an Anosov torus if and only if one of its prime summands is either the 3-torus, the mapping torus of , or the mapping torus of a hyperbolic automorphism.
2010 Mathematics Subject Classification:
57M50, 57N37, 37D20, 51H20
We would like to thank Professor Xuezhi Zhao for helpful conversations and comments. The first author gratefully acknowledges the hospitality and support of Peking University where part of this research was carried out.
1. Introduction
A closed oriented connected 3-manifold is called irreducible if every embedded 2-sphere in bounds a 3-ball; otherwise is called reducible. We say that an embedded closed oriented connected surface in is incompressible if whenever for an embedded disc , then bounds a disc in ; equivalently the homomorphism induced by inclusion is injective. We refer to [3] for standard notions and terminology on 3-manifolds.
If is a reducible 3-manifold, then by the Kneser-Milnor theorem it can be decomposed, uniquely up to diffeomorphism, into a finite connected sum
[TABLE]
where each is irreducible and .
The following fundamental result on the mapping class groups of reducible 3-manifolds was first announced in [2]. An elegant proof of this theorem was given by McCullough in [4, pp. 70–71]. As McCullough remarks, his proof is based on an argument of Scharlemann which appeared in [1, Appendix A].
Theorem 1.1**.**
([4, page 69]).* Let be a compact oriented connected 3-manifold. Then any orientation-preserving homeomorphism of is isotopic to a composite of the following four types of homeomorphisms:*
- (1)
homeomorphisms preserving summands;
- (2)
interchanges of homeomorphic summands;
- (3)
spins of summands;
- (4)
slide homeomorphisms.
In fact, the proof of Theorem 1.1 presented in [4, pp. 70-71] contains a finer form of that statement as follows:
Theorem 1.2**.**
Let be a compact oriented connected 3-manifold and be an orientation-preserving homeomorphism of . Then
[TABLE]
where is a finite composition of homeomorphisms of type 4 (slide homeomorphisms) and isotopies on , and each is a composition of finitely many homeomorphisms of type on .
Theorem 1.2 already implies that permutes the prime summands of . The main result of this paper is that can be chosen so that its restriction on each -invariant incompressible surface is the identity.
Theorem 1.3**.**
Let be an orientation-preserving homeomorphism of a closed oriented connected -manifold . If is an incompressible surface in with , then in Theorem 1.2 can be chosen to be the identity on .
An immediate consequence of Theorem 1.3 and its proof is the following:
Corollary 1.4**.**
Suppose is an orientation-preserving homeomorphism of a closed oriented connected 3-manifold and an -invariant incompressible surface. Then can be isotoped into a prime summand of so that preserves this prime summand and , where is a finite composition of slide homeomorphisms and isotopies.
Incompressible surfaces that are invariant under homeomorphisms play important roles in the study of 3-manifolds, in particular with respect to the effect of the induced action on their fundamental group. We say that an embedded 2-torus in a 3-manifold is an Anosov torus if there exists a diffeomorphism on such that and the induced action of over the fundamental group of is hyperbolic, or equivalently is (isotopic to) an Anosov map.
Motivated by problems in partially hyperbolic dynamics, F. Rodriguez Hertz, M. Rodriguez Hertz and R. Ures proved that only a few irreducible 3-manifolds admit Anosov tori:
Theorem 1.5**.**
([5, Theorem 1.1]).* A closed oriented connected irreducible 3-manifold admits an Anosov torus if and only if it is one of the following:*
- (1)
the 3-torus;
- (2)
the mapping torus of ;
- (3)
the mapping torus of a hyperbolic automorphism.
As pointed out in [5], it is easy to construct arbitrarily many different reducible 3-manifolds that admit Anosov tori. Indeed, once a manifold admits an Anosov torus, then the connected sum of with any other 3-manifold admits an Anosov torus as well; see [5, Remark 2.6]. Thus, in view of Theorem 1.5, the following interesting question arises, which was our inspiration for this paper:
Question 1*.*
([5, Question 1.4]). Let be a closed oriented connected reducible 3-manifold. If admits an Anosov torus, is one of its prime summands necessarily one of the 3-manifolds listed in Theorem 1.5?
As an application of Theorem 1.3, we answer Question 1 in the affirmative:
Theorem 1.6**.**
A closed oriented connected 3-manifold admits an Anosov torus if and only if one of its prime summands is one of the following:
- (1)
the 3-torus;
- (2)
the mapping torus of ;
- (3)
the mapping torus of a hyperbolic automorphism.
Outline
In Section 2 we recall the descriptions of the four types of homeomorphisms given in Theorem 1.1. In Section 3 we prove Theorem 1.3, Corollary 1.4 and Theorem 1.6.
2. Mapping class groups of reducible 3-manifolds
In this section we recall the isotopy types of the orientation-preserving homeomorphisms of -manifolds given in Theorem 1.1. We follow McCullough’s survey paper [4] for the description of the mapping class groups of reducible 3-manifolds. Suppose is a closed oriented reducible 3-manifold. By the Kneser-Milnor theorem, admits a non-trivial decomposition
[TABLE]
where the summands are irreducible and .
Consider the following construction of : Remove open 3-balls from a 3-sphere to obtain a punctured 3-cell with boundary components . For each summand , , choose a 3-ball and attach to along . For , let be a copy of attached to by identifying with and with to form an summand.
Using the above construction, we now describe the four types of homeomorphisms of given in Theorem 1.1. Note that two orientation-preserving homeomorphisms of are isotopic if and only if they induce the same permutation on the set of boundary components of .
1. Homeomorphisms preserving summands. These are the homeomorphisms that restrict to the identity on . They form a subgroup of isomorphic to Note that has two path components, that of the identity and that of a rotation about .
2. Interchanges of homeomorphic summands. Suppose and are orientation-preserving homeomorphic summands. Then we can construct a homeomorphism of fixing all other summands, leaving invariant, and interchanging and . Similarly, we can interchange two summands, leaving invariant.
3. Spins of summands. For each , we can construct a homeomorphism of fixing all other summands, leaving invariant, interchanging and , and restricting to an orientation-preserving homeomorphism that interchanges the boundary components of .
4. Slide homeomorphisms. For , let be obtained from by replacing with a 3-cell . Let be an arc in meeting only in its endpoints. Choose an isotopy of with and , so that moves around . A slide homeomorphism on that slides around is a homeomorphism defined by and . Choosing a different , it changes by an isotopy and, possibly, by a rotation about . Thus a choice of might determine two isotopy classes of a slide homeomorphism.
Similarly, we can slide either end of around an arc in .
Note, finally, that if and are two arcs meeting only in their endpoints, and is an arc representing the product of and in , then a slide of around is isotopic to a composite of slides around and . Similarly for sliding ends of ’s. It follows that the subgroup of generated by slide homeomorphisms is finitely generated.
3. Controlled slidings and isotopies
We now prove Theorem 1.3. Given a homeomorphism on , we will perform slide homeomorphisms and isotopies, controlling their effect on each -invariant incompressible surface.
Proof of Theorem 1.3.
Suppose is an incompressible surface in and is a homeomorphism so that .
The proof of the following lemma is straightforward:
Lemma 3.1**.**
For any homeomorphism , is an -invariant incompressible surface in .
Let be the union of the prime decomposition 2-spheres as described in Section 2. By a standard argument in 3-manifold topology, there is an isotopy of so that is disjoint from . Thus we can assume that , and so lies in some , say in (possibly after replacing by and by , according to Lemma 3.1). It is then clear that is not one of the summands. Also, implies that . Since , we have both
[TABLE]
We may assume that and meet transversely. The major part of the proof of Theorem 1.2 in [4] is to modify to reduce the number of components of by a sequence of slide homeomorphisms and isotopies so that , and finally make a further isotopy so that . And in Theorem 1.2 is the composition of those slides and isotopies.
Proposition 3.2**.**
Each factor of can be chosen so that it does not touch during its sliding/isotopy process.
Proof of Proposition 3.2.
We are going to prove this claim by examining at each step in the proof of Theorem 1.2 (Theorem 1.1) the effect of our choice of on .
Let be a circle of intersection that is innermost on , so that bounds a disc in with disjoint from .
Case 1. If , then separates a 3-ball from (since is a prime factor) and , where is a disk in . Since and , we conclude by (1) that . Since is incompressible, we indeed have . We choose a regular neighborhood of such that . Then there is an isotopy pulling into across with support in , eliminating (and possibly other circles of intersection as well). Clearly this isotopy process does not touch , therefore (1) still holds when we replace with . For simplicity, we will continue using to denote . We call the isotopy that we just performed a controlled isotopy; see Figure 1.
Similarly, if , , then can be eliminated by a controlled isotopy which does not affect .
Case 2. Suppose now and for some . We may assume that the interior of the other disc bounded by in intersects , otherwise it must lie in and so can be eliminated by a controlled isotopy as in Case 1. Thus we can choose an arc in with one endpoint in and the other endpoint in . Denote by the disc in which is the closure of the component of that does not contain the other endpoint of . The 2-sphere bounds a punctured 3-cell . Suppose (where ) is attached to . There is an arc with endpoints in which consists of three portions: First travels in to , then it goes through emerging in , following along near , and finally it travels through back to ; see Figure 2 (or Figure 1 in [4]).
Since and , we can choose the second portion of close enough to so that it does not touch . Moreover, the first portion and the third portion of also do not touch , since they stay in and meet the second portion at its end points, and lies in . So we conclude that does not touch . By (1) we have . Therefore we can further find a regular neighborhood (the region bounded by bold lines in Figure 2) such that . Now we quote the following fact whose proof follows rather directly from the definition, and which has been carefully presented in [7] with a fine figure illustration and precise formulas:
Lemma 3.3**.**
If is a slide homeomorphism along an arc with ends in , then is supported in a regular neighborhood .
Slide around , that is compose with the slide homeomorphism that slides around , to reduce a puncture in . By Lemma 3.3 and the fact that , we have that the sliding does not touch . Therefore (1) still holds when we replace with . Again, for simplicity we still use to denote . We call the slide homeomorphism that we just performed a controlled sliding (see Figure 2).
Similarly, we slide each end of an attached to without touching .
We continue performing controlled slidings for each attached to and each end of an attached to until we reach at the point where bounds a 3-ball in . Now can be eliminated by a controlled isotopy.
Finally, suppose , for some . If there is no arc in with one end in and the other end in , then can be eliminated by a controlled isotopy. If there is an arc in with one end in and the other end in , then we choose so that is not a boundary component of and slide as above summands attached to and each end of an attached to until is eliminated.
Repeating the above controlled slidings and controlled isotopies as far as needed, we reach .
Note that no component of (resp. of ) can bound a 3-ball in . For each , there are two cases (similarly for each ):
There is some . Since is a prime factor, each 2-sphere in which does not bound a 3-ball must be parallel to , that is to say, and bound a 3-manifold homeomorphic to in .
for some . By the same reason as above, must be parallel to .
Both cases imply that and bound a , a disjoint union of copies of , in . Clearly we can isotope to by pushing across the and then reach . Since (1) holds and is incompressible, we have for some regular neighborhood of , therefore the last isotopy can be made without touching . This finishes the proof of Proposition 3.2. ∎
We have now completed the proof of Theorem 1.3. ∎
Proof of Corollary 1.4.
Suppose is an incompressible surface in
[TABLE]
where each is irreducible and . As explained in the proof of Theorem 1.3 (cf. Lemma 3.1), we may assume that lies in .
Let be a composition of controlled slidings and isotopies as performed in Theorem 1.3 so that
[TABLE]
This means that permutes the prime factors of . Since moreover restricts to the identity on and , we deduce that . Since we conclude that
[TABLE]
∎
Proof of Theorem 1.6.
Let be a closed oriented connected -manifold and suppose is an Anosov torus, that is, there is a diffeomorphism such that and the induced homomorphism is hyperbolic.
Since every Anosov torus is incompressible [6], we can assume that lies in some , say in (cf. Lemma 3.1). By Theorem 1.3 and Corollary 1.4 there is a finite composition of slide homeomorphisms and isotopies so that
[TABLE]
We extend to a diffeomorphism We have
[TABLE]
and so is Anosov. Since is irreducible, must be one of the three types of 3-manifolds listed in Theorem 1.5. This finishes the proof. ∎
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] F. Bonahon, Cobordism of automorphisms of surfaces , Ann. Sci. École Norm. Sup. 16 (1983), 237–270.
- 2[2] E. César de Sá and C. Rourke, The homotopy type of homeomorphisms of 3-manifolds , Bull. Amer. Math. Soc. (N.S.) 1 , no. 1 (1979), 251–254.
- 3[3] J. Hempel, 3-manifolds , Princeton University Press And University of Tokyo Press, 1976.
- 4[4] D. Mc Cullough, Mappings of reducible 3-manifolds , Proceedings of the Semester in Geometric and Algebraic Topology, Warsaw, Banach Center (1986), 61–76.
- 5[5] F. Rodriguez Hertz, M. Rodriguez Hertz and R. Ures, Tori with hyperbolic dynamics in 3-manifolds , J. Mod. Dyn. 5 , no. 1 (2011), 185–202.
- 6[6] F. Rodriguez Hertz, M. Rodriguez Hertz and R. Ures, Partial hyperbolicity and ergodicity in dimension three , J. Mod. Dyn. 2 , no. 2 (2008), 187–208.
- 7[7] X. Zhao, On the Nielsen numbers of slide homeomorphisms on 3-manifolds. Topology Appl. 136 , no. 1-3 (2004), 169–188.