Yield Trajectory Tracking for Hyperbolic Age-Structured Population Systems
Kevin Schmidt, Iasson Karafyllis, Miroslav Krstic

TL;DR
This paper develops a control method for age-structured hyperbolic PDE population systems to track desired yield trajectories, accommodating seasonal variations, input constraints, and without requiring exact model parameters.
Contribution
It introduces a control approach using Lyapunov functionals and integral delay equations to achieve trajectory tracking in complex PDE systems with practical constraints.
Findings
Exponential convergence to desired yield trajectories demonstrated.
Controller works without exact model parameters or real-time age-profile measurements.
Numerical simulations validate the effectiveness of the proposed control scheme.
Abstract
For population systems modeled by age-structured hyperbolic partial differential equations (PDEs) that are bilinear in the input and evolve with a positive-valued infinite-dimensional state, global stabilization of constant yield set points was achieved in prior work. Seasonal demands in biotechnological production processes give rise to time-varying yield references. For the proposed control objective aiming at a global attractivity of desired yield trajectories, multiple non-standard features have to be considered: a non-local boundary condition, a PDE state restricted to the positive orthant of the function space and arbitrary restrictive but physically meaningful input constraints. Moreover, we provide Control Lyapunov Functionals ensuring an exponentially fast attraction of adequate reference trajectories. To achieve this goal, we make use of the relation between first-order…
Click any figure to enlarge with its caption.
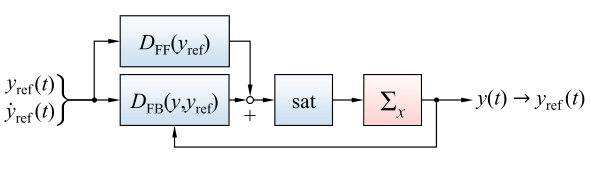 Figure 1
Figure 1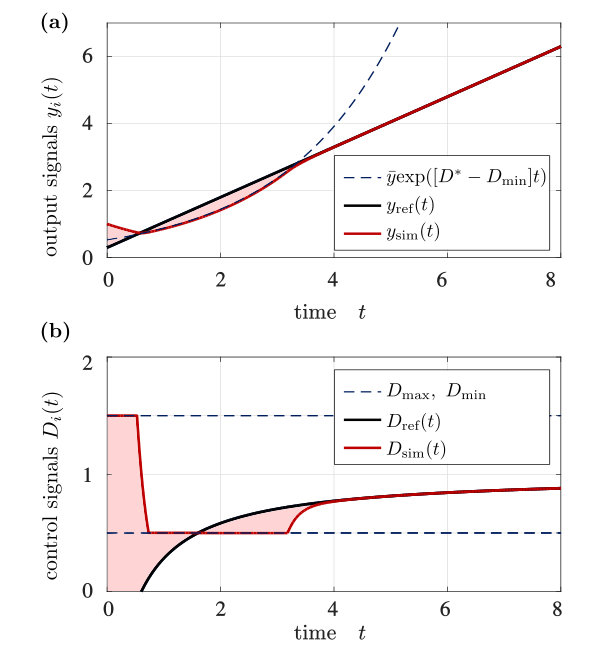 Figure 2
Figure 2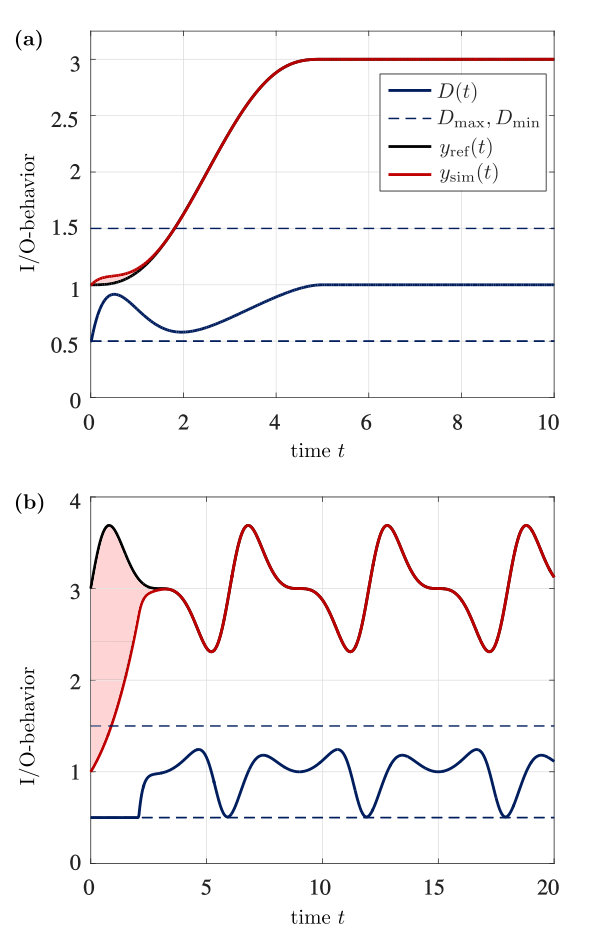 Figure 3
Figure 3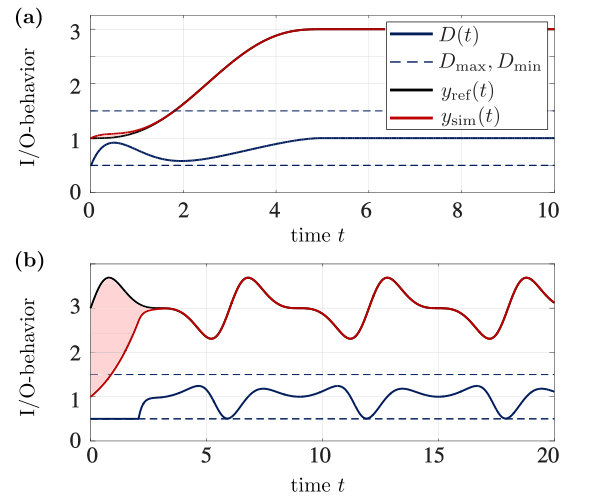 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7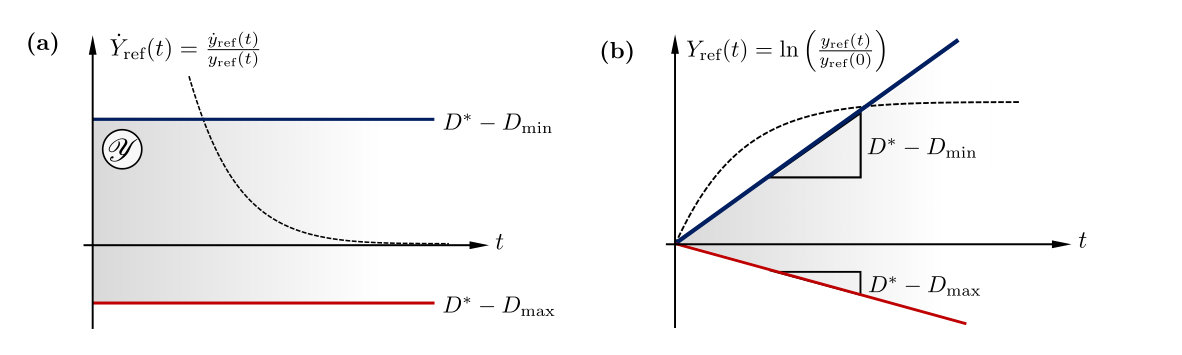 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.