Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras
Filippo Basso, Emanuele Menegatti, Alberto Pretto

TL;DR
This paper introduces a new calibration framework for RGB-D cameras that improves accuracy, is easy to use, and works across different sensor types, enhancing robotics applications like mapping and object recognition.
Contribution
A novel two-component error model and calibration protocol that unifies error sources and improves calibration accuracy for various RGB-D sensors.
Findings
Enhanced calibration accuracy over existing methods
Applicable to different RGB-D sensor technologies
Validated through extensive experiments and comparisons
Abstract
Color-depth cameras (RGB-D cameras) have become the primary sensors in most robotics systems, from service robotics to industrial robotics applications. Typical consumer-grade RGB-D cameras are provided with a coarse intrinsic and extrinsic calibration that generally does not meet the accuracy requirements needed by many robotics applications (e.g., highly accurate 3D environment reconstruction and mapping, high precision object recognition and localization, ...). In this paper, we propose a human-friendly, reliable and accurate calibration framework that enables to easily estimate both the intrinsic and extrinsic parameters of a general color-depth sensor couple. Our approach is based on a novel two components error model. This model unifies the error sources of RGB-D pairs based on different technologies, such as structured-light 3D cameras and time-of-flight cameras. Our method…
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24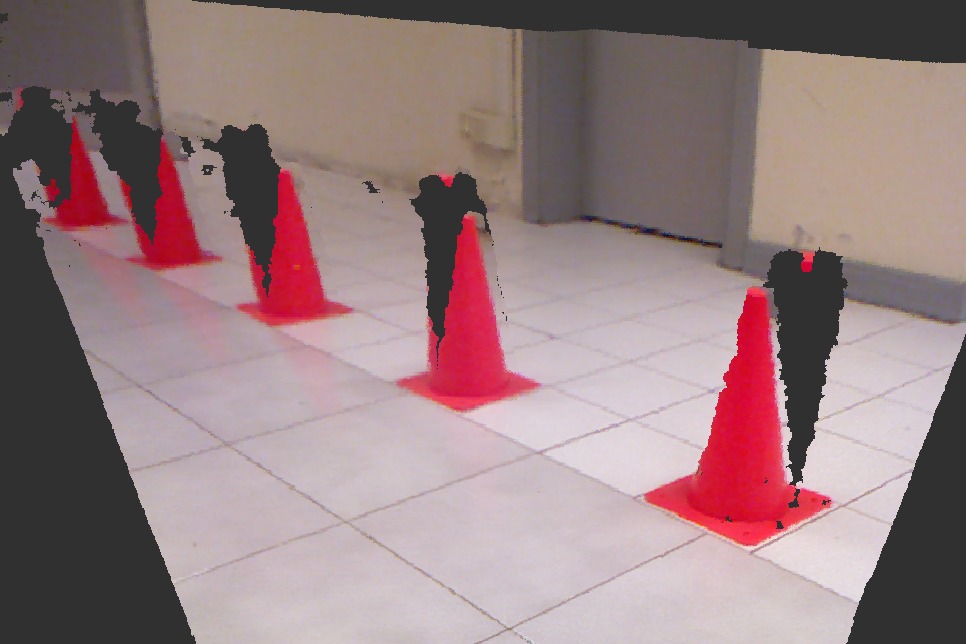 Figure 25
Figure 25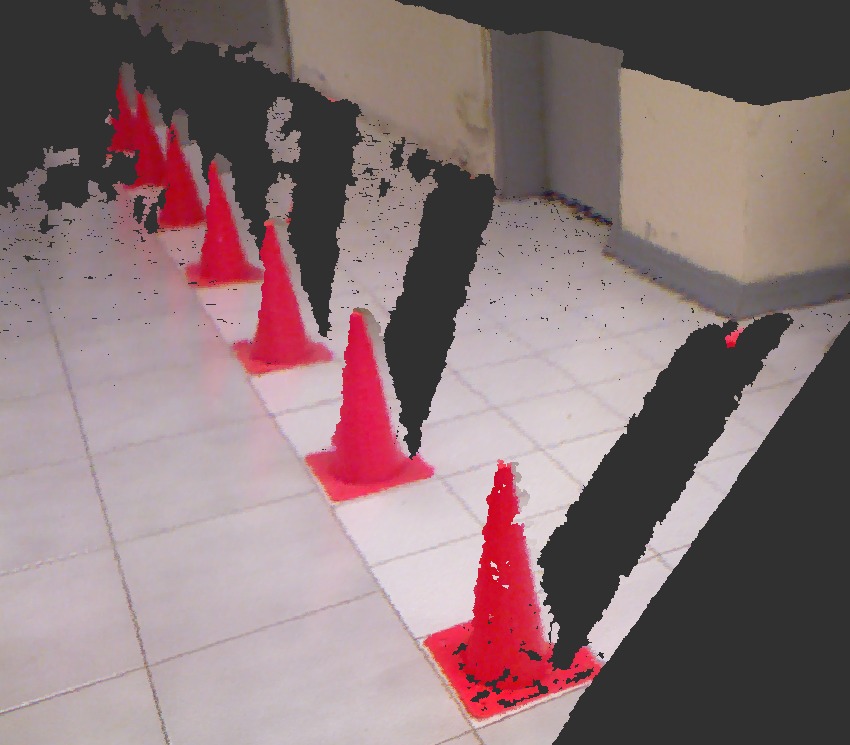 Figure 26
Figure 26 Figure 27
Figure 27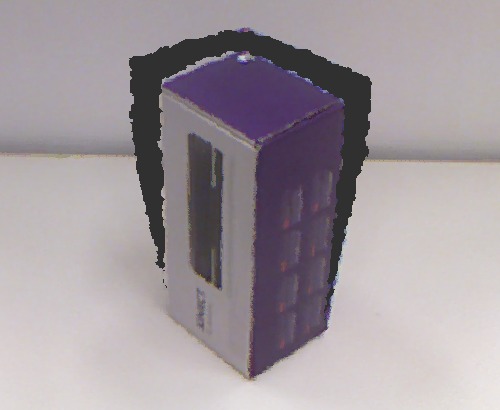 Figure 28
Figure 28 Figure 29
Figure 29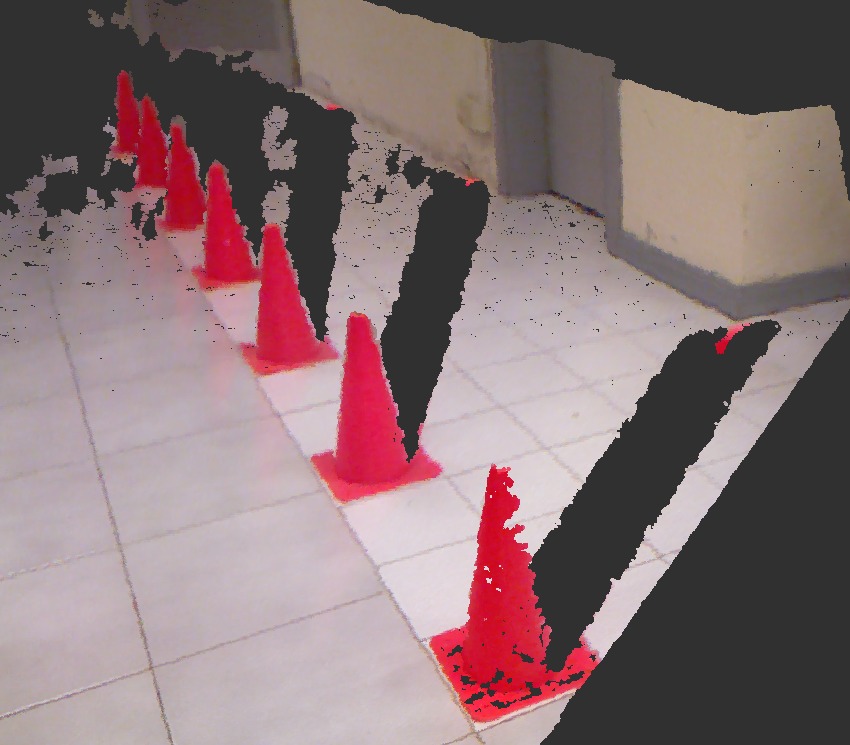 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35 Figure 36
Figure 36 Figure 37
Figure 37 Figure 38
Figure 38 Figure 39
Figure 39 Figure 40
Figure 40Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.