Perfect phylogenies via branchings in acyclic digraphs and a generalization of Dilworth's theorem
Ademir Hujdurovi\'c, Edin Husi\'c, Martin Milani\v{c}, Romeo Rizzi and, Alexandru I. Tomescu

TL;DR
This paper introduces new formulations and algorithms for the minimum conflict-free row split problem in perfect phylogeny, connecting it to branchings in acyclic digraphs and generalizing Dilworth's theorem, with implications for computational complexity and optimization.
Contribution
It provides transparent formulations linking the problem to acyclic digraph branchings, extends Dilworth's theorem, and offers improved algorithms and complexity results.
Findings
Strengthened heuristic via a new min-max theorem in digraphs
Proved APX-hardness of the problems
Developed approximation and exponential-time algorithms
Abstract
Motivated by applications in cancer genomics and following the work of Hajirasouliha and Raphael (WABI 2014), Hujdurovi\'c et al. (IEEE TCBB, to appear) introduced the minimum conflict-free row split (MCRS) problem: split each row of a given binary matrix into a bitwise OR of a set of rows so that the resulting matrix corresponds to a perfect phylogeny and has the minimum possible number of rows among all matrices with this property. Hajirasouliha and Raphael also proposed the study of a similar problem, in which the task is to minimize the number of distinct rows of the resulting matrix. Hujdurovi\'c et al. proved that both problems are NP-hard, gave a related characterization of transitively orientable graphs, and proposed a polynomial-time heuristic algorithm for the MCRS problem based on coloring cocomparability graphs. We give new, more transparent formulations of the two…
Click any figure to enlarge with its caption.
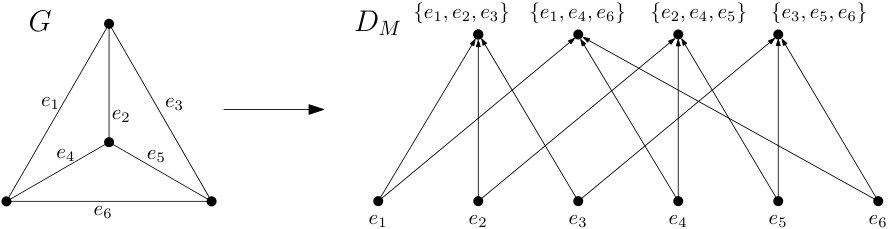 Figure 1
Figure 1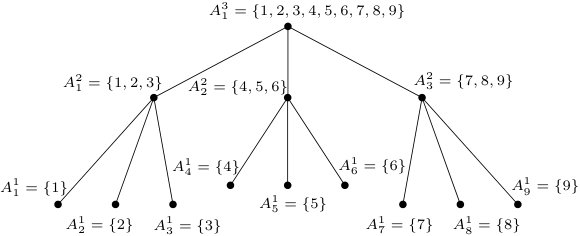 Figure 2
Figure 2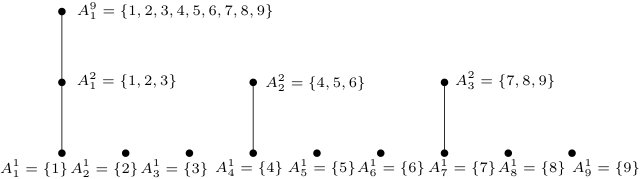 Figure 3
Figure 3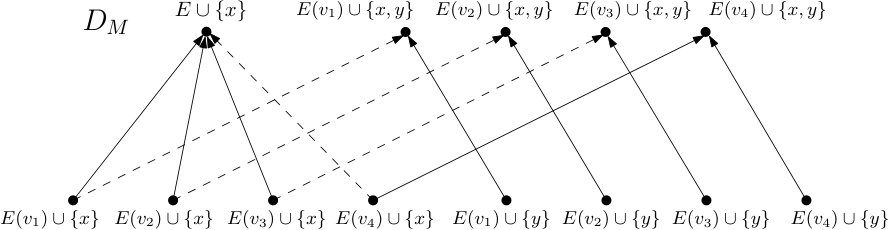 Figure 4
Figure 4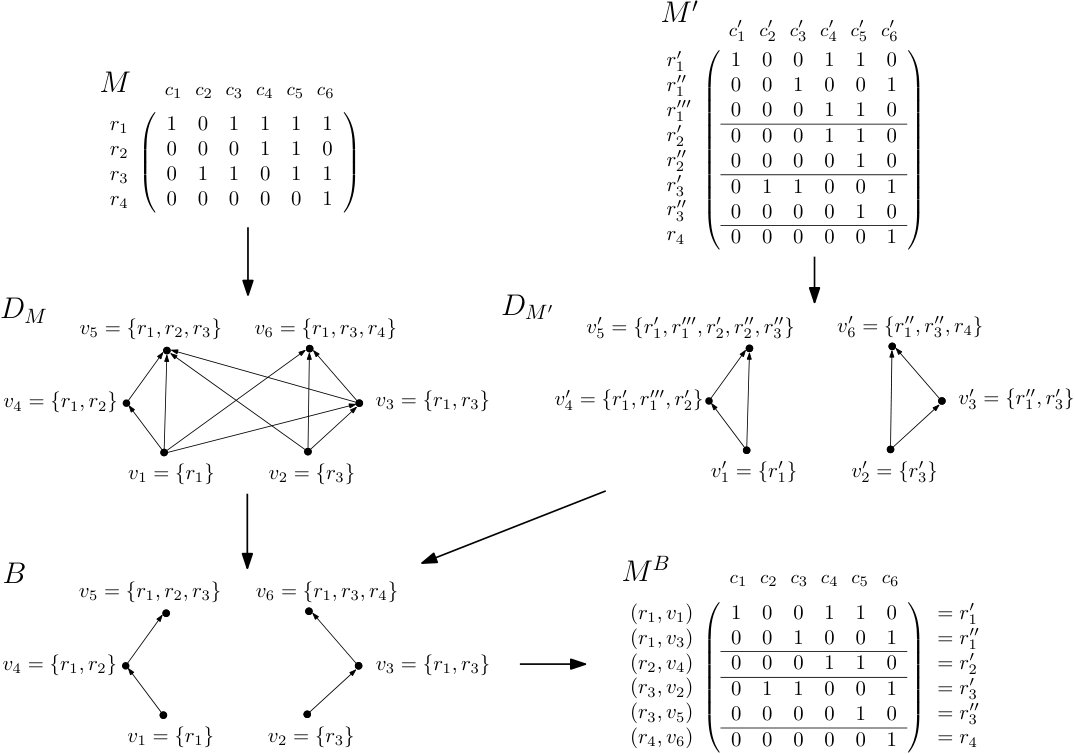 Figure 5
Figure 5 Figure 6
Figure 6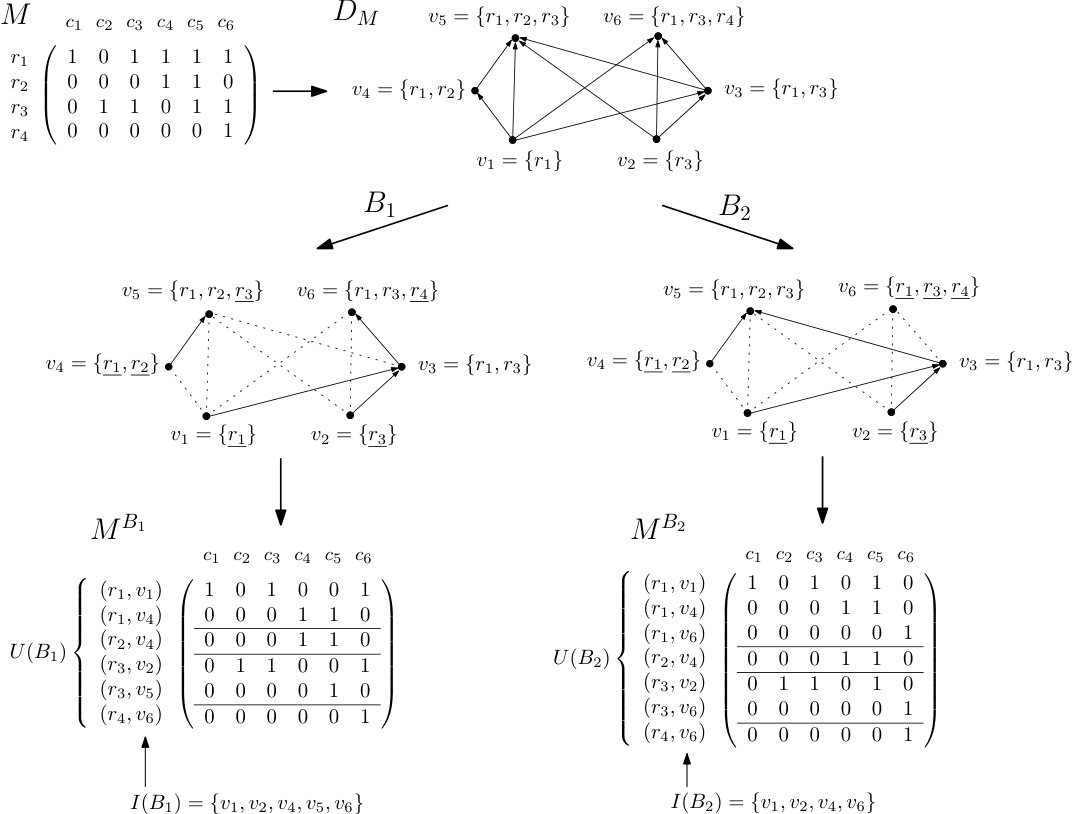 Figure 7
Figure 7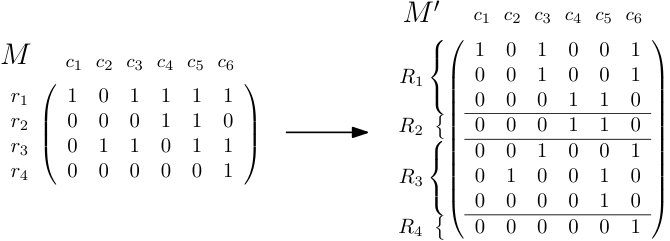 Figure 8
Figure 8 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Perfect phylogenies via branchings in acyclic digraphs
and a generalization of Dilworth’s theorem
Ademir Hujdurovića,b E-mail: [email protected]
Edin Husićc,b E-mail: [email protected]
Martin Milaniča,b E-mail: [email protected]
Romeo Rizzid E-mail: [email protected]
Alexandru I. Tomescue E-mail: [email protected]
Abstract
Motivated by applications in cancer genomics and following the work of Hajirasouliha and Raphael (WABI 2014), Hujdurović et al. (IEEE TCBB, to appear) introduced the minimum conflict-free row split (MCRS) problem: split each row of a given binary matrix into a bitwise OR of a set of rows so that the resulting matrix corresponds to a perfect phylogeny and has the minimum possible number of rows among all matrices with this property. Hajirasouliha and Raphael also proposed the study of a similar problem, in which the task is to minimize the number of distinct rows of the resulting matrix. Hujdurović et al. proved that both problems are NP-hard, gave a related characterization of transitively orientable graphs, and proposed a polynomial-time heuristic algorithm for the MCRS problem based on coloring cocomparability graphs.
We give new, more transparent formulations of the two problems, showing that the problems are equivalent to two optimization problems on branchings in a derived directed acyclic graph. Building on these formulations, we obtain new results on the two problems, including: (i) a strengthening of the heuristic by Hujdurović et al. via a new min-max result in digraphs generalizing Dilworth’s theorem, which may be of independent interest, (ii) APX-hardness results for both problems, (iii) approximation algorithms, and (iv) exponential-time algorithms solving the two problems to optimality faster than the naïve brute-force approach. Our work relates to several well studied notions in combinatorial optimization: chain partitions in partially ordered sets, laminar hypergraphs, and (classical and weighted) colorings of graphs.
a University of Primorska, UP IAM, Koper, Slovenia
b University of Primorska, UP FAMNIT, Koper, Slovenia
c London School of Economics, Department of Mathematics, London, United Kingdom
d University of Verona, Department of Computer Science, Verona, Italy
e Helsinki Institute for Information Technology HIIT, Department of Computer Science, University of Helsinki, Finland
Keywords: Perfect phylogeny, Minimum Conflict-Free Row Split problem, branching, acyclic digraph, chain partition, Dilworth’s theorem, min-max theorem, approximation algorithm, APX-hardness
1 Introduction
A perfect phylogeny is a rooted tree representing the evolutionary history of a set of objects. The objects bijectively label the leaves of the tree and there are binary variables called characters, each labeling exactly one edge of the tree. For each leaf, the set of characters that appear on the unique root-to-leaf path is the set of characters taking value at the object labeling the leaf. While every perfect phylogeny naturally corresponds to an binary matrix having objects as rows and characters as columns, the perfect phylogeny problem asks the opposite question: Does a given binary matrix correspond to a perfect phylogeny? The perfect phylogeny problem and various generalizations of it have been extensively studied in computational biology. In this paper we study two combinatorial optimization problems, both generalizations of the perfect phylogeny problem, first considered by Hajirasouliha and Raphael [18] and motivated by applications in cancer genomics.
Following the work [18], Hujdurović et al. [20] introduced the minimum conflict-free row split problem, which can be informally stated as follows: given a binary matrix , split each row of into a bitwise OR111Here, OR denotes the usual binary OR function, assuming that value true is represented by and value false by [math], that is, if and only if at least one of and has value . of a set of rows so that the resulting matrix corresponds to a perfect phylogeny and has the minimum number of rows among all matrices with this property. To state the problem formally, we need two definitions.
Definition 1.1**.**
Given a matrix , three distinct rows , , of and two distinct columns and of , we denote by the submatrix of formed by rows , , and columns , (in this order). Two columns and of a binary matrix are said to be in conflict if there exist rows of such that
[TABLE]
We say that a binary matrix is conflict-free if no two columns of are in conflict.
Definition 1.2**.**
Let . Label the rows of as . A binary matrix is a row split of if there exists a partition of the set of rows of into sets such that for all , is the bitwise of the binary vectors in . The set of rows of is said to be the set of split rows of row (with respect to ).
For simplicity, we defined a row split as a binary matrix for which a suitable partition of rows exists. However, throughout the paper we will make a slight technical abuse of this terminology by considering any row split of as already equipped with an arbitrary (but fixed) partition of its rows satisfying the above condition. For an example of these notions, see Fig. 1. For the sake of clarity, from now on we omit displaying the zeros in binary matrices.
We denote by the minimum number of rows in a conflict-free row split of . Formally, the minimum conflict-free row split problem is defined as follows:
MinimumConflict-FreeRowSplit (MCRS):
Input: A binary matrix .
Task: Compute .
We will also consider a variant of the problem, proposed by Hajirasouliha and Raphael [18], in which the task is to compute a row split of such that the number of distinct rows in is minimized. Let denote the minimum number of distinct rows in a conflict-free row split of . Similarly as above, we consider the corresponding optimization problem.
MinimumDistinctConflict-FreeRowSplit (MDCRS):
Input: A binary matrix .
Task: Compute .
The connection between conflict-free matrices and perfect phylogenies is well known: the rows of a binary matrix are the leaves of a perfect phylogeny if and only if is conflict-free (see [9, 17]). Moreover, if this is the case, then the corresponding tree can be retrieved from in time linear in the size of [16]. The intuition behind the fact that a conflict-free matrix corresponds to a perfect phylogeny is that one can map each row to a leaf of a tree, and each column to an edge, so that each row has a exactly on those columns that are mapped to the edges on the path from the root to the leaf corresponding to the row. The forbidden matrix from Definition 1.1 as a submatrix leads a contradiction, since then the two distinct edges and to which columns and are mapped, respectively, are such that appears both before, and after, on a root-to-leaf path. We refer to [18, 20] and to references therein for further details on the biological aspects of the MCRS and the MDCRS problems.
Another well studied family of combinatorial objects closely related to the MCRS and the MDCRS problems are laminar set families. A set family is said to be laminar if every two sets satisfy , , or . The connection with laminar families follows from the fact that a binary matrix is conflict-free if and only if the sets of rows indicating the positions of ones in the columns of form a laminar family. This connection will be exploited in Section 4.2. Laminar families of sets play an important role in network design problems [22], in the study of packing and covering problems [13, 5, 27], and in several other areas of combinatorial optimization, see, e.g., [28].
In [20], the MCRS and the MDCRS problems were proved NP-hard, a related characterization of transitively orientable graphs was given, and a polynomial-time heuristic algorithm was proposed for the MCRS problem based on coloring cocomparability graphs (that is, complements of transitively orientable graphs). Following [20], the main aim of this paper is to further advance the understanding of structural and computational aspects of the MCRS and the MDCRS problems.
Our results and techniques. The first and main result of this paper is a result showing that the MCRS and the MDCRS problems can be equivalently formulated as two optimization problems on branchings in a directed acyclic graph derived from the given binary matrix, the so-called containment digraph. (Precise definitions of these notions and the corresponding problems will be given in Section 2.) These equivalencies lead to more transparent formulations of the two problems. We will ascertain the applicability and usefulness of these novel formulations by deriving the following results and insights about the MCRS and the MDCRS problems:
- •
We prove a new min-max result on digraphs strengthening Dilworth’s theorem on chain partitions and antichains in partially ordered sets. This result is described in Section 3.1, which can be read independently of the rest of the paper. This result, besides being interesting on its own as a generalization of a classical min-max result, connects well to the MCRS problem via the problem’s branching formulation. The constructive, algorithmic proof of the result shows that a related problem is polynomially solvable: a problem in which only a subset of all branchings of the containment digraph is examined, namely the so-called linear branchings (branchings corresponding to chain partitions of the partial order underlying the containment digraph). This approach leads to a new heuristic for the MCRS problem, improving on a previous heuristic from [20].
- •
We strengthen the NP-hardness results for the two problems to APX-hardness results.
- •
We complement the inapproximability results with three approximation algorithms: a -approximation algorithm for the MDCRS problem (implying that the problem is APX-complete) and two approximation algorithms for the MCRS problem, the approximation ratios of which are expressed in terms of two parameters of the containment digraph, corresponding to the height and the width of the underlying partial order, respectively.
- •
The branching formulations allow for the development of faster exact exponential-time solutions for the two problems, when compared to a direct brute-force approach that follows directly from the problems’ definitions.
Comparison with related work. In [18], Hajirasouliha and Raphael introduced the so-called Minimum-Split-Row problem, in which only a given subset of rows of the input matrix needs to be split and, roughly speaking, the task is to minimize the number of additional rows in the resulting conflict-free row split. All results from [18] actually deal with the variant of the problem in which all rows need to be split (some perhaps trivially by setting ); in this case, the optimal value of the Minimum-Split-Row problem coincides with the difference , where is the number of rows of . In the same paper, a lower bound on the value of was derived and, in the concluding remarks of the paper, a study of the MDCRS problem was suggested. In subsequent works by Hujdurović et al. [20], the MCRS problem was introduced and several claims from [18] were proved incorrect, including an NP-hardness proof of the Minimum-Split-Row problem (which would imply NP-hardness of the MCRS problem). However, it was shown in [20] that the MCRS problem is indeed NP-hard, as is the MDCRS problem. Moreover, a polynomially solvable case of the MCRS problem was identified and an efficient heuristic algorithm for the problem on general instances was proposed, based on coloring cocomparability graphs.
The results of this paper improve on the previously known results about the two problems: NP-hardness results are strengthened to APX-hardness results, approximation algorithms for the two problems are proposed, and the heuristic algorithm for the MCRS problem given by Hujdurović et al. from [20] is improved. The key tools leading to most of these results are the newly proposed branching formulations and the new min-max theorem strengthening Dilworth’s theorem. The min-max theorem has a constructive algorithmic proof, leading to a polynomial-time algorithm to compute a chain partition of a given partially ordered set equipped with a monotone weight function such that the of sum of the maximum weights in the chains is minimized. This result contrasts with known results in the literature implying that two natural variants of the problem are NP-hard: (i) the variant in which the chains used in the partition have to be of bounded size [29, 25], and (ii) the variant in which the weight function is not necessarily monotone, which corresponds to a variant of the graph coloring problem known as Weighted Coloring (see, e.g., [15, 8, 6, 3]), in the class of cocomparability graphs. We refer to the remarks following Corollary 3.5 in Section 3.1 for more details. See also Figure 10 in Section 5, where we summarize the relations between the problems introduced in this paper and several problems studied in the literature, along with the corresponding complexity results.
Structure of the paper. The branching formulations of the two problems are given in Section 2. A strengthening of Dilworth’s theorem and its connection to the MCRS problem is discussed in Section 3. APX-hardness proofs and approximation algorithms are presented in Section 4. We conclude the paper with a summary and some questions for future research in Section 5.
Remark on notation. A binary matrix is a matrix having rows and columns, and all entries [math] or . Each row of such a matrix is a vector in ; each column is a vector in . We will usually denote by and the (multi)sets of rows and columns of , respectively. The entry of at row and column will be denoted by or when appropriate. For brevity, we will often write “the number of distinct rows (resp., columns) of ” to mean “the maximum number of pairwise distinct rows (resp., columns) of ”. Two rows (resp., columns) are considered distinct if they differ as binary vectors. All binary matrices in this paper will be assumed to contain no row whose all entries are [math].
In our proofs and constructions we will often simplify the binary matrix under consideration by working instead with the matrix denoted by , obtained by taking from exactly one copy from each set of identical columns.
An extended abstract of this work appeared in the proceedings of WG 2017 [19].
2 Formulations in Terms of Branchings in Directed Acyclic Graphs
In this section, we are going to formulate the MCRS and the MDCRS problems in terms of branchings in directed acyclic graphs (DAGs). First, we give the necessary definitions.
Definition 2.1**.**
Let be a DAG. A branching of is a subset of such that is a digraph in which for each vertex there is at most one arc leaving .
The following construction (see, e.g., [18]) can be performed on any given binary matrix and results in a directed acyclic graph. Given a column , the support of is the set defined as and denoted by . Given a binary matrix , the containment digraph of is the directed acyclic graph with vertex set and arc set where is the relation of proper inclusion of sets. See Fig. 2 for an example.
Let be a binary matrix, let be the containment digraph of , and let be a branching of . For a vertex , we denote by the set of all vertices such that . A source of is a vertex not entered by any arc of . For a vertex , an element (that is, a row of ) is said to be covered in with respect to (or just -covered) if . (When it is clear to which branching we are referring to, we will say just that “ is covered in ”.) Analogously, we say that is uncovered in with respect to if is not covered in . A -uncovered pair is a pair such that is a row of , is a vertex of (that is, the support of a column of ), , and is uncovered in with respect to . For a row of , we will denote by the set of all -uncovered pairs with first coordinate , and by the set of all -uncovered pairs. To illustrate these notions, we elaborate further on the example from Fig. 2 in Fig. 3, where two branchings and of the arc set of are depicted, together with uncovered pairs with respect to each of the two branchings.
For a branching , we say that a vertex is -irreducible if there exists some element that is uncovered in with respect to (equivalently, if ). In particular, every source of is -irreducible. We denote by the set of all -irreducible vertices; see Fig. 3 for an example.
We denote by the minimum number of elements in over all branchings of . Similarly, we denote with the minimum number of elements in over all branchings of . The corresponding optimization problems are the following:
MinimumUncoveringBranching (MUB):
Input: A binary matrix .
Task: Compute .
MinimumIrreducingBranching (MIB):
Input: A binary matrix .
Task: Compute .
The announced equivalence between the MCRS and the MUB problems, and between the MDCRS and the MIB problems is captured in the following theorem. We denote by any real number such that there exists an algorithm for multiplying two binary matrices (e.g., [23]).
Theorem 2.1**.**
For every binary matrix with exactly distinct columns, the following holds:
Any branching of can be transformed in time to a conflict-free row split of with exactly rows and with exactly distinct rows. 2. 2.
Any conflict-free row split of can be transformed in time to a branching of such that is at most the number of rows of and is at most the number of distinct rows of .
Consequently, for every binary matrix , we have and .
Results presented in Sections 3.2, 4.1, and 4.3 will rely on Theorem 2.1. Before giving a proof of the theorem, let us discuss one further consequence of it. The theorem allows for the development of faster exact exponential-time solutions for the two problems, when compared to a direct brute-force approach that follows directly from the problems’ definitions. Consider the simple approach of enumerating all possible branchings of and selecting the best one. Denoting by the set of vertices of of out-degree at least one and disregarding polynomial factors, the time complexity of this approach is of the order , where is the number of distinct columns of the input matrix . On the other hand, the time complexity of the straightforward approach to the two problems based on generating all possible row splits of cannot even be expressed as a function of only. A row with ones has at least as many splits as the number of partitions of a -element set, which is the quantity counted by the Bell number and clearly bounded from below by . Thus, for a matrix with rows, each with at least ones, the total number of row splits of is at least .
Theorem 2.1 will be proved in two steps. First, we show how to split the input matrix in a conflict-free way, given a branching of its containment digraph; the number of rows (resp., distinct rows) of the resulting row split equals the number of -uncovered pairs (resp., -irreducible vertices). Second, we show that any conflict-free row split of can be reduced, by possibly deleting some rows, into a row split of obtained from some branching of (as in the first step).
The proof of the first part of Theorem 2.1 relies on the notion of a -split, defined as follows.
Definition 2.2**.**
Let be a binary matrix with rows and columns . For a branching of , we define the -split of , denoted by , as the matrix with rows indexed by the elements of the set , and columns , as follows. Let and for all , let (so ). For a vertex , we denote by the set of all vertices in reachable by a directed path from in (note that . For all and all , set:
[TABLE]
Note that if , then . See Fig. 3 for an example of a binary matrix with two branchings and of its containment digraph and the corresponding row splits.
In the following lemma we show that the -split of is a conflict-free row split of and compute the number of rows (resp., the number of distinct rows) of .
Lemma 2.2**.**
Let be a binary matrix without duplicated columns, a branching of , and let be the -split of . Then is a conflict-free row split of with rows, splitting each row of into rows of indexed by . Moreover, the number of distinct rows in is .
Proof.
It is clear that the number of rows in is . For a row of , we claim that is the bitwise OR of the rows of indexed by the set . Suppose that . Then . We claim that there exists a vertex such that and . If , we can choose and we are done. If this is not the case, then is covered in , and hence for some such that . Now if , then we repeat the argument with replaced by a “covering” in-neighbor. The procedure has to terminate after finitely many steps. Hence, we may assume that . This implies that . Suppose now that . Then and therefore , for every . This shows that is bitwise OR of the rows of indexed by , and therefore is row split of matrix .
Suppose that two columns and of are in conflict. Then there exist row indices, and in such that and . Since , we have and , that is, and are reachable by a directed path from in . Since is a branching, this is only possible if or ; we may assume without loss of generality that . Since , it follows that . This further implies that . Since , it follows that , which contradicts the fact that . The obtained contradiction shows that is conflict-free.
It remains to prove that the number of distinct rows in is . Note that for any row in we have . Let . It is not difficult to see that for such that and , the rows of indexed by and are equal. Hence the number of distinct rows in is at most . To complete the proof we construct a set of size of pairwise distinct rows of . For every , let be an arbitrary element of the (non-empty) set . Since is uncovered in with respect to , the pair is an element of . We claim that the rows of indexed by over all are pairwise distinct. Suppose that there exist and in such that and the rows of indexed by and are equal. Since and the two rows are equal, we infer that . Therefore and . Since is a DAG, it follows that , a contradiction. This shows that there are exactly distinct rows in . ∎
The following lemma, exemplified in Fig. 4, is the key to the converse direction.
Lemma 2.3**.**
There exists an algorithm that takes as input a binary matrix without duplicated columns and a conflict-free row split of , and computes in time a branching of such that can be obtained from by removing some rows.
Proof.
Denote the rows of with and the columns with . Let be the set of split rows of , and let be the column of corresponding to . For , let and . We claim that for every , if is an arc in then is an arc in . Suppose that is an arc in and is not an arc in . It follows that and . Let . Then for some . Since , it follows that and consequently , a contradiction.
We say that an arc is elementary in if there exists no such that both and are arcs of . Let be the subset of the arc set of defined by if and only if and is an elementary arc of . We claim that is a branching of . Suppose that and , for . Then, both and are elementary arcs of , which implies that . Since and is conflict-free, it follows that or vice versa. By definition of , we obtain that . However, since , we may assume that there exists some , and therefore, there exists , such that . Since we have , contrary to the fact that . We conclude that is a branching.
Next, we prove that can be obtained from by removing some rows, or, equivalently, that there exists a one-to-one mapping assigning to each row of an identical row of . Every row of is indexed by an element of . Every element of is of the form with for some and . To define a mapping as above, it suffices to show that there exists a row of such that and is equal to the row of indexed by , or more precisely that if and only if . First, observe that implies that there exists some such that .
Assume that . Since and is conflict-free, it follows that either or . Suppose that is a proper subset of and therefore there exists a non-trivial -path consisting only of elementary arcs of . Since is an element of , the set is non-empty, which implies that the path corresponds to a non-trivial -path in , therefore . Since , and , it follows that . However, this contradicts the fact that . Therefore, and consequently . We proved that implies that .
Suppose now that . If , then and , as desired. If , then since , it follows that . Combining this with the fact that , we conclude that . This completes the proof that the row of is equal to the row of indexed by .
The above considerations imply the existence of a mapping assigning to each row of an identical row of . In fact, any mapping as defined above is also one-to-one, which can be seen as follows. First, two rows of indexed by elements of with distinct first coordinates, say and , will be mapped to rows of from and , respectively, and by construction the sets and are disjoint. Second, suppose we have two rows of indexed by elements of with identical first coordinates but distinct second coordinates, say and . The last part of the proof of Lemma 2.2 implies that no two rows of indexed by pairs that differ in the values of their second coordinates are identical. Consequently, the images of rows of indexed by and are also not identical (as binary vectors), and therefore they correspond to different rows of .
We conclude that can be obtained from by deleting some rows.
It remains to estimate the time complexity of computing branching . First, we compute the containment digraph in time . Second, we compute the set of elementary arcs of in time using the algorithm of Aho et al. [1]. Finally, branching can be computed from in time . The claimed running time follows. ∎
Now we have everything ready to prove Theorem 2.1.
Theorem 2.1 (restated)****.
For every binary matrix with exactly distinct columns, the following holds:
Any branching of can be transformed in time to a conflict-free row split of with exactly rows and with exactly distinct rows. 2. 2.
Any conflict-free row split of can be transformed in time to a branching of such that is at most the number of rows of and is at most the number of distinct rows of .
Consequently, for every binary matrix , we have and .
Proof.
Let be a branching of . By Lemma 2.2, it suffices to show that , the -split of , can be computed in time . This can be achieved as follows. First, we compute the reduced matrix in time using radix sort. Second, we compute the containment digraph in time by performing pairwise comparisons of columns of . Third, we compute the set in time by checking for each of the vertices , each of the elements , and each of the in-neighbors of in whether . Fourth, in time we compute for each the set . Finally, in time we compute the matrix using the definition. Note that , hence and the claimed time complexity follows.
Now, let be a conflict-free row split of .
Consider first the case when is without duplicated columns. In this case and by Lemma 2.3, in time a branching of can be computed such that , the -split of , can be obtained from by removing some rows. Since (resp., ) equals the number of rows (resp., the number of distinct rows) of , this implies that is at most the number of rows of and is at most the number of distinct rows of .
Consider now the general case. Let be a set of columns of such that the matrix can be identified with the submatrix of obtained by considering only the columns in . Let be the submatrix of obtained by considering only the columns in . Then, is a conflict-free row split of . Note that matrix can be computed in time proportional to its size, , plus the number of columns, , plus the time it takes to compute , which can be done in time using radix sort. Since is without duplicated columns, we have by the previous case that in time a branching of can be computed such that is at most the number of rows of and is at most the number of distinct rows of . Since the number of rows of equals the number of rows of , this immediately implies that is at most the number of rows of . Also, by construction, any two distinct rows of correspond to a pair of distinct rows of and hence the number of distinct rows of is at most the number of distinct rows of . This implies that is at most the number of distinct rows of . The total time complexity is , which establishes the second part of the theorem.
Finally, we show that and . Let be a branching of such that . By the first part of the theorem, there exists a conflict-free row split of with rows, therefore . Conversely, if is a conflict-free row split of with rows, then there exists a branching of such that is at most the number of rows of (that is, ). This implies . Therefore, . The proof of equality is analogous. ∎
3 A Strengthening of Dilworth’s Theorem and its Connection to the
Minimum Conflict-Free Row Split Problem
By Theorem 2.1, the MCRS problem can be concisely formulated in terms of a problem on branchings in a derived digraph. As shown by Hujdurović et al. in [20], the MCRS problem is NP-hard; consequently, the MUB problem is also NP-hard. In this section we show that a related problem in which we examine only a subset of all the branchings of the containment digraph of the input binary matrix is polynomially solvable. This will be achieved by deriving, in Section 3.1, a min-max theorem generalizing the classical Dilworth’s theorem on partially ordered sets, which may be of independent interest. The resulting heuristic algorithm will be described in Section 3.2 (see also Remark 4.13 on p. 4.13).
3.1 A Min-Max Relation Strengthening Dilworth’s Theorem
This section can be read independently of the rest of the paper.
Consider a pair where is a DAG and is a weight function of . (We use for the set of non-negative integers.) The weight function is called monotone if for every .
In , a non-trivial path is a directed path with at least one arc. We denote by the transitive closure of , that is, the DAG on the same vertex set as having an arc if and only if there exists a non-trivial path in from to . A chain in is a sequence of vertices such that for all ; sometimes we regard as the set of its vertices . The price of chain is given by . A family of vertex-disjoint chains is called a chain partition of if every vertex of is contained in precisely one chain of . The price of chain partition is defined as . Consider the following problem.
MinimumPriceChainPartition:
Input: A DAG and a monotone weight function of .
Task: Compute a chain partition of such that the price is minimum possible.
In this section we give a polynomial-time algorithm and a min-max characterization for the above problem. As can be expected, the notion of antichain will play a main role in this min-max characterization. An antichain of is a set of vertices such that is an independent set (that is, a set of pairwise non-adjacent vertices) in ; in other words, no non-trivial path of has both endpoints in . Note that for any chain and any antichain . The width of , denoted by , is the maximum cardinality of an antichain in .
A classical theorem of Dilworth states that equals the minimum number of chains in a chain partition of [7]. Moreover, a chain partition of into chains can be computed in time where , is any real number such that there exists an algorithm for multiplying two binary matrices (e.g., ), and the notation ignores logarithmic factors. Indeed, by applying the approach of Fulkerson [12] (see also [26, 24]), a minimum chain partition of can be computed by solving a maximum matching problem in a derived bipartite graph having vertices. This can be done in time using the algorithm of [21].222Alternatively, one could use the bipartite matching algorithm from [10] to obtain the (incomparable) running time of where is the number of edges in the transitive closure of . For the sake of simplicity of presentation, we state the theorem with the running time resulting from using the Ibarra-Moran algorithm.
For later use, we summarize these facts as follows.
Theorem 3.1** (Dilworth’s theorem).**
Every DAG admits a chain partition of size . Such a chain partition can be computed in time .
Our characterization will be a refinement of Dilworth’s theorem and its algorithmic proof makes use of Dilworth’s theorem as a subroutine. We must introduce one further notion however. A tower of antichains of is a sequence of antichains of , , with . The value of an antichain is given by and the value of tower is defined as .
To appreciate the purpose of this notion, we begin with a simple observation.
Lemma 3.2**.**
Let be a DAG, let be a chain partition of , and let be a tower of antichains of . Then, even if the weight function is not monotone.
Proof.
For every chain and every antichain we have that . Moreover, if , then . Indeed, if , then
[TABLE]
Since is a chain partition of , then , and we can always rename its chains as in such a way that, for every , chain intersects the antichain . At this point,
[TABLE]
∎
For the case of monotone weight functions, the following min-max strengthening of Dilworth’s theorem holds.
Theorem 3.3**.**
Let be a DAG and let be a monotone weight function of . Then admits a chain partition and a tower of antichains such that . Such a pair can be computed in time .
Proof.
The proof is by induction on . Clearly, the statement holds for . As for the inductive step, let and consider a vertex without any incoming arcs and such that for all . Such a vertex exists since the subgraph of induced by the set of vertices achieving the minimum value of is acyclic. Let , and consider a chain partition of and a tower of antichains of such that .
Two cases are possible. If then let be obtained from by adding a chain comprising the sole vertex and let be obtained from by adding any antichain of such that . Since , we infer that and hence . Therefore, closing the induction in this case.
Assume therefore that . Let be an antichain in with and let be the set of vertices of from which there is a non-trivial path to a vertex of . Notice that since is not an antichain and is a source vertex of . The DAG is an acyclic subgraph of of width at least , since is a subset of its vertex set. Moreover, while the width of an arbitrary induced subgraph can in general increase with vertex removal, this is not the case for , because any path in between two vertices of is also a path in , by the choice of . It follows that the DAG is of width ; hence, by the inductive hypothesis, it admits a chain partition with . (Indeed, we could just take for every .) Also the acyclic subgraph of has width ; hence, by Dilworth’s theorem it admits a chain partition covering all its vertices. Now we construct our chain partition for : let . After a possible renaming of the chains in the two chain partitions, we can assume that and for every , and hence define the chain . (Indeed, will be the last vertex of and the first vertex of , thus this chaining of chains can be performed.) Note that is a chain partition of with Clearly, is a valid tower of antichains for .
The above proof of the existence of a pair of a chain partition and a tower of antichains of satisfying is constructive and can be turned into a time algorithm for computing such a pair . Indeed, at each step of the algorithm, we delete one vertex, make one recursive call to the algorithm, compute the set and the acyclic subgraph together with a chain partition covering all its vertices. The time complexity of each step is dominated by computing . By Theorem 3.1, this can be done in time . The claimed time complexity of follows. ∎
To see that Theorem 3.3 is a strengthening of Dilworth’s theorem, consider an arbitrary DAG and let be the weight function of that is constantly equal to . Then, the price of any chain is and the price of a chain partition equals its cardinality. Moreover, the value of any antichain is , and consequently the value of any tower of antichains is . Since is a lower bound on the cardinality of any chain partition, applying Theorem 3.3 to gives exactly the statement of Dilworth’s theorem for .
We would also like to emphasize that due to the non-linearity of the definitions of the price of a chain and the value of an antichain, Theorem 3.3 is incomparable with the classical weighted generalization of Dilworth’s theorem due to Frank [11].
Remark 3.4**.**
The monotonicity assumption in Theorem 3.3 is necessary. If we drop it, the price and the value may diverge. Consider the DAG on vertex set , with and , with , and where the arcs are according to set inclusion. Here, whereas .
On the other hand, a simple application of Dilworth’s theorem shows that the monotonicity assumption is not necessary in the case of -weight functions.
Lemma 3.2 and Theorem 3.3 imply the following.
Corollary 3.5**.**
MinimumPriceChainPartition* can be solved optimally in time . More specifically, in the stated time a minimum price chain partition of can be found with the additional property that (hence is simultaneously a minimum price chain partition and a minimum size chain partition of ).*
Two remarks are in order here, showing that the result of Corollary 3.5 is sharp in two ways. First, let us note that the variant of the MinimumPriceChainPartition problem in which the chains used in the partition have to be of bounded size was studied by Moonen and Spieksma in [25], who described a practical application encountered at Bruynzeel Storage Systems, a manufacturing company in the Netherlands, to a problem of optimally loading pallets on a truck.333The upper bound on the size of chains relates to the fact that trucks are of bounded height. Moonen and Spieksma referred to the problem as “Minimum Weight Partition into -chains” (where is the upper bound on the size of the chains) and showed that the problem is APX-hard even in the case of unit weights, strengthening the previous NP-hardness result from [29].
Second, the variant of MinimumPriceChainPartition where the weight function is not restricted to be monotone is NP-hard. This follows from the fact that the Weighted Coloring problem is NP-hard in the class of interval graphs, as shown by Escoffier et al. [8]. The input to the Weighted Coloring problem is a graph and a weight function and the task is to find a partition of into independent sets minimizing the value of . The Weighted Coloring problem in interval graphs finds applications in distributed computing in transportation networks and in dynamic storage allocation in computer processes [15]. Given an interval graph represented by an interval model and a weight function , the Weighted Coloring problem given is equivalent to the problem of finding a chain partition of the DAG with vertex set and arc set of minimum price with respect to . The claimed NP-hardness follows.
3.2 Connection with the Minimum Conflict-Free Row Split Problem
We will now describe a heuristic algorithm for the MCRS problem based on Theorem 3.3 and its algorithmic proof. The basic idea is to search for an optimal solution only among linear branchings, where a branching of is said to be linear if it defines a subgraph of maximum in- and out-degree at most one, that is, a disjoint union of directed paths. Note that such branchings correspond bijectively to chain partitions of .
We denote with the minimum number of elements in over all linear branchings of . We now introduce the following problem, referred to as MinimumUncoveringLinearBranching: Given a binary matrix , compute a linear branching of such that .
For a binary matrix , define a function with (recall that vertices of are pairwise distinct subsets or ). By definition of , we have whenever is an arc in . This implies that is a monotone weight function of . It is not difficult to see that for a linear branching and its corresponding chain partition , we have . Since linear branchings correspond bijectively to chain partitions, it follows that MinimumUncoveringLinearBranching is a special case of MinimumPriceChainPartition. Using Theorem 3.3, we obtain that a linear branching of with can be computed in time . This proves the following theorem.
Theorem 3.6**.**
MinimumUncoveringLinearBranching* can be solved to optimality in time .*
Note that Theorem 3.6 yields a heuristic polynomial-time algorithm for the MUB problem, and consequently for the MCRS problem. We are now going to explain why this algorithm improves on the heuristic for the latter problem by Hujdurović et al. from [20]. For the sake of simplicity of exposition, suppose that the input matrix does not have any pairs of identical columns. (It is not difficult to see that this assumption is without loss of generality.) In this case, the algorithm from [20] returns a row split of the input matrix naturally derived from an optimal coloring of the complement of the underlying undirected graph of , which is a cocomparability graph and thus an optimal coloring can be computed efficiently, see, e.g., [14]. Such optimal colorings correspond bijectively to minimum chain partitions of ; each color class corresponds to a chain. In the terminology of branchings, the conflict-free row split of the input matrix returned by the heuristic from [20] is exactly the -split of (cf. Definition 2.2) where is the linear branching of corresponding to a minimum chain partition of .
In the above approach, any proper coloring could be used instead of an optimal coloring of the derived cocomparability graph. In branching terminology, choosing a proper coloring of the derived cocomparability graph so that the number of rows of the output row split is minimized corresponds exactly to MinimumUncoveringLinearBranching, which can be solved optimally by Theorem 3.6. Thus, the heuristic algorithm for the MCRS problem that returns the -split of where is an optimal solution to MinimumUncoveringLinearBranching always returns solutions that are at least as good as those computed by the algorithm by Hujdurović et al. from [20]. Moreover, note that by Corollary 3.5, digraph has a minimum price chain partition that is also minimum with respect to size. This implies the existence of an optimal solution to MinimumUncoveringLinearBranching on such that the corresponding chain partition is of size and, equivalently, the existence of an optimal coloring of the derived cocomparability graph that minimizes the number of rows in the derived conflict-free row split of over all proper colorings of the derived graph.
Remark 3.7**.**
As discussed in [18, 20], the main motivation for the MCRS problem comes from cancer genomics, with the goal to reconstruct, from a set of given mixed tumor samples, a simplest possible mutational history of the tumor, represented by a rooted tree (without any restriction on the shape of the tree). Without going into details, let us note that the output of the heuristic algorithm for the MCRS problem given by Theorem 3.6 corresponds to a simplest possible reconstruction of the mutational history within a restricted space of rooted trees, namely within the space of rooted trees such that the root is the only node that is allowed to have more than one non-leaf child.
4 (In)approximability Issues
In this section we will discuss (in)approximability properties of the four problems studied in this paper, giving both APX-hardness results and approximation algorithms. The approximation ratios of some of our algorithms will be described in terms of the following parameters of the input matrix. Recall that the width of a DAG is the maximum cardinality of an antichain in . The height of a DAG is the maximum number of vertices in a directed path contained in . The width and the height of a binary matrix are denoted by and by , respectively, and defined as the width, resp. the height, of the containment digraph of .
4.1 Hardness Results
Our main inapproximability results are summarized in the following theorem, which shows hardness already for very restricted input instances.
Theorem 4.1**.**
The MUB and the MIB problems (and consequently the MCRS and the MDCRS problems) are APX-hard, even for instances of height .
The above result implies that none of the four problems admits a polynomial-time approximation scheme (PTAS), unless P = NP. Proving that a problem is APX-hard also provides a different proof of NP-hardness.
The APX-hardness for the two branching problems is established by developing -reductions from the vertex cover problem in cubic graphs, which is known to be APX-hard [2]. The APX-hardness of the other two problems then follows from Theorem 2.1. Recall that is a class of problems approximable to within a constant factor in polynomial time. A problem is said to be APX-hard if every problem in reduces to by an approximation-preserving reduction. Another way to prove that a problem is APX-hard is to show that an APX-complete problem is -reducible to . For the sake of self-containment, we recall the definition of -reducibility; for further background on APX-hardness, we refer to [4].
Definition 4.1**.**
Let and be two NP-hard optimization problems. Problem is said to be -reducible to problem if there exists a polynomial-time transformation mapping instances of to instances of and constants such that for every instance of the following conditions hold:
- •
,
- •
for every feasible solution of with objective value we can compute in polynomial time solution for with objective value such that .
To simplify the description of the hardness reductions of this section, we will use the notion of a column hypergraph of a given binary matrix . This notion is closely related to the containment digraph of and will find a further application in Section 4.2. Recall that a set family (or a hypergraph) is a pair where is a set and is a subset of the power set . Elements of are the vertices of ; elements of are its hyperedges. The column hypergraph of a binary matrix is the hypergraph having the rows of as vertices and the support sets of the columns of as hyperedges. Formally, has vertex set and hyperedge set . Note that the set of hyperedges of the column hypergraph of equals the vertex set of the containment digraph .
We split the proof of Theorem 4.1 into two parts.
Proposition 4.2**.**
MinimumUcoveringBranching* is APX-hard, even for instances of height . Consequently, MinimumConflict-FreeRowSplit is APX-hard, even for instances of height .*
Proof.
We will prove the proposition using the fact that the vertex cover problem is APX-hard on cubic graphs [2]. Recall that a graph is cubic if every vertex of is incident with exactly three edges and that a vertex cover of a graph is a subset such that . For all , we define as a set of all edges in incident with . In symbols, . We say that a graph is cubic if for every it holds .
We will construct an -reduction from the vertex cover problem in cubic graphs to the MUB problem on instances of height . Let be a cubic graph. Let and be two new vertices not in . Let and let be the hypergraph with vertex set and edge set
[TABLE]
Let be a binary matrix without duplicated columns such that the column hypergraph of is isomorphic to . Note that is of height . See Fig. 5 for an example construction, representing the containment digraph of the binary matrix derived from the complete graph .
We denote by the vertex cover number of , that is, the minimum size of a vertex cover in . The APX-hardness of MinimumUcoveringBranching will be a consequence of the following claim and its proof.
Claim. .
Proof of the claim.
We split the proof of the equality into two parts, proving each of the two inequalities separately.
First, we prove the inequality . Let be a minimum vertex cover of . Define a branching of as follows:
[TABLE]
See Fig. 6 for an example.
It is clear from the construction that is indeed a branching. Since is a vertex cover, every is covered in with respect to . It is now not difficult to see the set of uncovered pairs with respect to equals
[TABLE]
Since we have for all , this implies , as claimed.
Now we prove the inequality . Let be a branching of such that . For every source vertex in and every element it holds that is uncovered in . Since the source vertices are exactly the vertices of the form and , we have exactly uncovered pairs corresponding to the source vertices. The minimality of implies that all arcs of the form are in . Therefore, for every , element is the only possibly uncovered element in vertex .
We show that we may assume that vertex is not irreducible, that is, that all its elements are covered in . Suppose first that is not covered in . Then does not contain any arc of the form , and therefore, by minimality, contains all arcs of the form . Replacing one of these arcs with the arc results in a branching such that , hence in an optimal branching covering . Now, suppose that there exists some such that . Let be an endpoint of in and consider the vertex . Since is not covered in , the arc is not in . The optimality of implies that . Now, replace the arc with the arc . This results in a branching such that . Moreover, since removing the arc makes uncovered in , but adding the arc makes element covered in . Therefore, repeating the above procedure will eventually result in an optimal branching with respect to which is not irreducible, as claimed.
Define . The fact that every is covered in implies that is a vertex cover of . Moreover, for every , element is the only uncovered element in vertex , and for every , all elements in are covered. This implies that the total number of uncovered pairs by equals , implying , which proves the claimed inequality .
This completes the proof of the claim. ∎
We now complete the proof by showing that the above reduction is an -reduction. Since is cubic, every vertex in a vertex cover of covers exactly edges, hence . This implies that , hence the first condition in the definition of -reducibility is satisfied with . The second condition in the definition of -reducibility states that for every branching of we can can compute in polynomial time a vertex cover of such that for some . We claim that this can be achieved with . Indeed, the second part of the proof of above claim shows how one can transform in polynomial time any branching of into a vertex cover of such that . Therefore, . This shows that the vertex cover problem in cubic graphs is -reducible to the MinimumUcoveringBranching and completes the proof. ∎
Proposition 4.3**.**
The MIB problem is APX-hard, even for instances of height . Consequently, the MDCRS problem is APX-hard, even for instances of height .
Proof.
We construct an -reduction from the vertex cover problem in cubic graphs to the MIB problem. Let be a cubic graph. Let be a binary matrix without duplicated columns such that its column hypergraph is isomorphic to , where . See Fig. 7 for an example construction, representing the containment digraph of the binary matrix derived from the complete graph .
To prove APX-hardness, we will show that . This will suffice: since every vertex in a vertex cover covers at most three edges, we have , which will imply that . Similar arguments as those used at the end of the proof of Proposition 4.2 can then be used to infer that the given reduction is an -reduction, thus completing the proof of the theorem.
We split the proof of into two parts. First we show that . Let be any minimum vertex cover of . Define a set of arcs of as . We first claim that is branching of . Indeed, if this was not the case, then there would exist an edge and two distinct vertices such that . This would imply that and and consequently . By definition of , none of and is in , contradicting the fact that is vertex cover.
Let . We claim that implies that . Suppose for a contradiction that with . Since , the definition of implies that , for every , in particular, every element of is -covered in . Hence , a contradiction. This shows that . Together with this implies that . It follows that , as claimed.
Next we show that by showing that . Let be a branching of such that . Define a set with . We claim that is a vertex cover of . Suppose that this does not hold, that is, that there exists , such that and . Since , it follows that . By construction, every element of of the form is -irreducible, unless contains all the three arcs leading to . Consequently, contains all the three arcs leading to , and similarly for . In particular, we infer that , contradicting the fact that is a branching in . Since is the disjoint union of and and we have , implying that . ∎
Theorem 4.1 (restated)****.
The MUB and the MIB problems (and consequently the MCRS and the MDCRS problems) are APX-hard, even for instances of height .
Proof.
The theorem combines the statements of Propositions 4.2 and 4.3. ∎
4.2 -Approximating and via Laminar Set Families
The result of Theorem 4.1 raises the question whether the four problems (MCRS, MDRCS, MUB, and MIB) admit constant factor approximations. In this section, we show that this is the case for the MDRCS and the MIB problems. This will be achieved by proving a lower and an upper bound for , which will together imply a simple -approximation algorithm.
The lower bound is based on a connection between conflict-free matrices and laminar set families and an upper bound on the size of a laminar family in terms of the size of the ground set. Recall that a hypergraph is said to be laminar if every two hyperedges satisfy , , or . Recall also that the column hypergraph of a binary matrix is the hypergraph with vertex set and hyperedge set .
The following observation follows immediately from definitions.
Observation 4.4**.**
A binary matrix is conflict-free if and only if its column hypergraph is laminar.
The following upper bound on the size of a laminar hypergraph is well known, see, e.g., [28].
Theorem 4.5**.**
Every laminar hypergraph satisfies .
Observation 4.4 and Theorem 4.5 imply the following.
Corollary 4.6**.**
Every conflict-free binary matrix with rows satisfies , where is the number of distinct columns of .
The claimed -approximation will be based on three lemmas.
Lemma 4.7**.**
If is a conflict-free row split of , then the number of distinct columns of is at least as large as the number of distinct columns of .
Proof.
It suffices to prove that each two distinct columns of are still distinct after performing the row split. Let be two distinct columns of and the corresponding columns of . Then, without loss of generality, there exists a row of such that, and . Let be the set of split rows of with respect to . Then for every it holds . Since the rows in split , there exists some with . This gives us and , showing that columns and are distinct. ∎
The following lemma shows that the value of is invariant under deleting one of a pair of identical columns.
Lemma 4.8**.**
For every binary matrix it holds that
[TABLE]
[TABLE]
Proof.
Since is submatrix of , it follows that and, similarly, that . Conversely, since any conflict-free row split of can be transformed to a conflict-free row split of with the same number of rows (by duplicating some columns) it follows that and . We have shown that and . Moreover, since the containment digraphs and are the same, we infer that and . ∎
Corollary 4.6 and Lemmas 4.7 and 4.8 together with a simple row splitting strategy imply the following.
Lemma 4.9**.**
For every binary matrix , we have , where is the number of distinct columns of .
Proof.
Let . First, we prove that or, equivalently, that . Let be a row split of with exactly distinct rows. Let be the number of distinct columns of . Let be a new matrix obtained from by taking one row from each set of identical rows. It is not difficult to see that is conflict-free, with exactly distinct columns. Further on, by Corollary 4.6 it holds and hence by Lemma 4.7 it holds , as claimed.
It remains to show . By Lemma 4.8 it suffices to show that . Let be the row split of obtained by splitting each row with ones into rows, each with exactly one non-zero entry. By construction, has exactly columns and therefore at most distinct rows. It follows that , as desired. ∎
Now we have everything ready to state and prove the announced approximation result.
Theorem 4.10**.**
There is a -approximation algorithm for the MDCRS (and consequently for the MIB) problem running in time on a given matrix where is the number of distinct columns of .
Proof.
Let be a binary matrix with rows and columns, exactly of which are distinct. The proof of Lemma 4.9 is constructive and leads to the following algorithm to compute a row split of with at most distinct rows:
Compute . (This can be done in time using radix sort.) 2. 2.
Compute a row split of obtained by splitting each row with ones into rows, each with exactly one non-zero entry. (This can be done in time .) 3. 3.
Transform into a row split of by an appropriate duplication of some columns. (This can be done in time , since has at most rows and the constructed matrix will have exactly columns.)
Clearly, the algorithm produces a row split of with at most distinct rows. Since , it follows that this is a -approximation. Moreover, using the fact that , we infer that the total time complexity of the algorithm is , as stated. ∎
Note that Theorems 4.1 and 4.10 imply that the MDCRS and the MIB problems are APX-complete.
4.3 Two Approximation Algorithms for Computing and
While the question of whether the MCRS (and consequently the MUB) problem admits a constant factor approximation algorithm on general instances remains open, we give in this section two partial results in this direction. We show that the two problems admit constant factor approximation algorithms on instances of bounded height or width.
Roughly speaking, the following theorem shows that for instances of bounded height any algorithm for the MCRS problem based on branchings is a constant factor approximation algorithm.
Theorem 4.11**.**
Let be a binary matrix and let be an arbitrary branching of . Then, the number of rows in the -split of is at most .
Proof.
Let and let be a branching of with . Recall that the number of rows in the -split of is . Since by Theorem 2.1 , it suffices to prove that . For , define the set with
[TABLE]
We claim that
[TABLE]
(In fact, since , equality holds in (1), but we will not need it in the proof.) Let . We will show that there exists some such that . If , then , since . If , it follows that is covered in with respect to , and therefore, there exists some such that , and . If , then it is clear that . If , then we repeat the described procedure, which has to terminate after finitely many steps. Therefore, there exists some such that , as claimed. This establishes inclusion (1).
Since the height of is , it follows that the height of is at most . Moreover, since is a branching, it follows that , for every . Combining this with (1), we have
[TABLE]
Since , it follows that . This completes the proof. ∎
Remark 4.12**.**
Since in Theorem 4.11, there is no restriction on the branching , an -approximation to can be obtained simply by taking and returning the resulting row split.
Remark 4.13**.**
The following example shows that for every and every , the algorithm for the MCRS problem given by Theorem 3.6 is not an -approximation when restricted to instances of height .
Example 4.14**.**
Fix a positive integer . For all , let be a binary matrix with rows (indexed by ) and columns. Entries of are defined so that the supports of columns of are given by for all and all (see Figs. 8 and 9 for an example). The height of is . Matrix is conflict-free, therefore . It can be seen that . Therefore, . It follows that for every , we have for all large enough .
For instances of bounded width, a constant factor approximation can be obtained by considering any -split resulting from a linear branching of consisting of paths. Note that such a branching can be computed in polynomial time using Dilworth’s theorem (Theorem 3.1).
Theorem 4.15**.**
Any algorithm that, given a binary matrix , computes a linear branching of consisting of paths and returns the corresponding -split of is a -approximation algorithm for the MCRS problem.
Proof.
Let be a binary matrix and let . Let be a chain partition of (the existence of such a partition is guaranteed by Dilworth’s theorem) and let be the linear branching of corresponding to . We will prove that , where denotes the set of rows of . We claim that the number of elements in with fixed first coordinate is at most . For a row of , let . We claim that , for every . Suppose that and for some . Since is a chain, we may assume without loss of generality that . Moreover, since are both in it follows that there exists a path in from to . Since , it follows that , and since there exists a path in from to , it follows that is covered in with respect to . This contradicts the assumption that . The obtained contradiction shows that , as claimed. Since , and is a chain partition of , it follows that . It is now easy to see that .
Since matrix is assumed to have no row whose all entries are [math], every row split of contains at least rows, that is, . It follows that and since the -split of has exactly rows (by Lemma 2.2), the claimed approximation ratio follows. ∎
5 Conclusion
In this paper, we revisited the minimum conflict-free row split problem and a variant of it. We formulated the two problems as optimization problems on branchings in a derived directed acyclic graph and, building on these formulations, obtained several new algorithmic and complexity insights about the two problems, including APX-hardness results and approximation algorithms. Moreover, we proved a min-max result on digraphs strengthening the classical Dilworth’s theorem and leading to a new heuristic for the MCRS problem. In Figure 10 we summarize the relations between several problems discussed in this paper, along with known complexity results and some applications. The relations are described informally; for instance, we say that problem reduces to problem if a polynomial-time algorithm for problem can be used to develop a polynomial-time algorithm for problem .
The main problem left open by our work is the determination of the exact (in)approximability status of the MCRS problem. In particular, does the problem admit a constant factor approximation? Other possibilities for related future research include: i) the study of the approximability properties of the closely related Minimum-Split-Row problem [18] (our preliminary investigations show that the problem, while being APX-hard, admits a -approximation); ii) a parameterized complexity study of the considered problems (along with identification of meaningful parameterizations), and iii) a study of extensions of the model that could be relevant for the biological application, such as the case when the input binary matrix may contain errors or has partially missing data. Finally, it would be interesting to find further applications of the polynomially solvable MinimumPriceChainPartition problem, as well as of the two branching problems, MinimumUncoveringBranching and MinimumIrreducingBranching, introduced in this paper.
Acknowledgments
The authors are grateful to the two anonymous reviewers for helpful remarks. This work is supported in part by the Slovenian Research Agency under research programs I0-0035, P1-0285, and research projects N1-0032, N1-0038, N1-0062, J1-6720, J1-7051, and by the Academy of Finland under Grant No. 274977.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] A. V. Aho, M. R. Garey, and J. D. Ullman. The transitive reduction of a directed graph. SIAM J. Comput. , 1(2):131–137, 1972.
- 2[2] P. Alimonti and V. Kann. Some APX-completeness results for cubic graphs. Theoret. Comput. Sci. , 237(1-2):123–134, 2000.
- 3[3] J. Araujo, N. Nisse, and S. Pérennes. Weighted coloring in trees. SIAM J. Discrete Math. , 28(4):2029–2041, 2014.
- 4[4] G. Ausiello, P. Crescenzi, G. Gambosi, V. Kann, A. Marchetti-Spaccamela, and M. Protasi. Complexity and Approximation . Springer-Verlag, Berlin, 1999.
- 5[5] J. Cheriyan, T. Jordán, and R. Ravi. On 2 2 2 -coverings and 2 2 2 -packings of laminar families. In Algorithms—ESA ’99 (Prague) , volume 1643 of Lecture Notes in Comput. Sci. , pages 510–520. Springer, Berlin, 1999.
- 6[6] D. de Werra, M. Demange, B. Escoffier, J. Monnot, and V. T. Paschos. Weighted coloring on planar, bipartite and split graphs: complexity and approximation. Discrete Appl. Math. , 157(4):819–832, 2009.
- 7[7] R. P. Dilworth. A decomposition theorem for partially ordered sets. Ann. of Math. (2) , 51:161–166, 1950.
- 8[8] B. Escoffier, J. Monnot, and V. T. Paschos. Weighted coloring: further complexity and approximability results. Inform. Process. Lett. , 97(3):98–103, 2006.