El\'ements de G\'ed\'esie et de la Th\'eorie des Moindres Carr\'es
Abdelmajid Ben Hadj Salem

TL;DR
This book provides foundational knowledge on geodesy and error theory, covering geometric aspects and non-linear adjustment techniques for students in geomatics and surveying.
Contribution
It offers a comprehensive introduction to geodesy and error theory, including non-linear adjustment methods, tailored for educational purposes.
Findings
Overview of geometric and spatial aspects of geodesy
Introduction to the theory of errors
Elements of non-linear adjustment
Abstract
It is a book on geodesy and the theory of errors for the students of the cycle of geomatics, surveying and mapping. The geometric and spatial aspects of geodesy are presented in the first part of the book. The second part is about the theory of errors. We give some elements of non-linear adjustment.
Click any figure to enlarge with its caption.
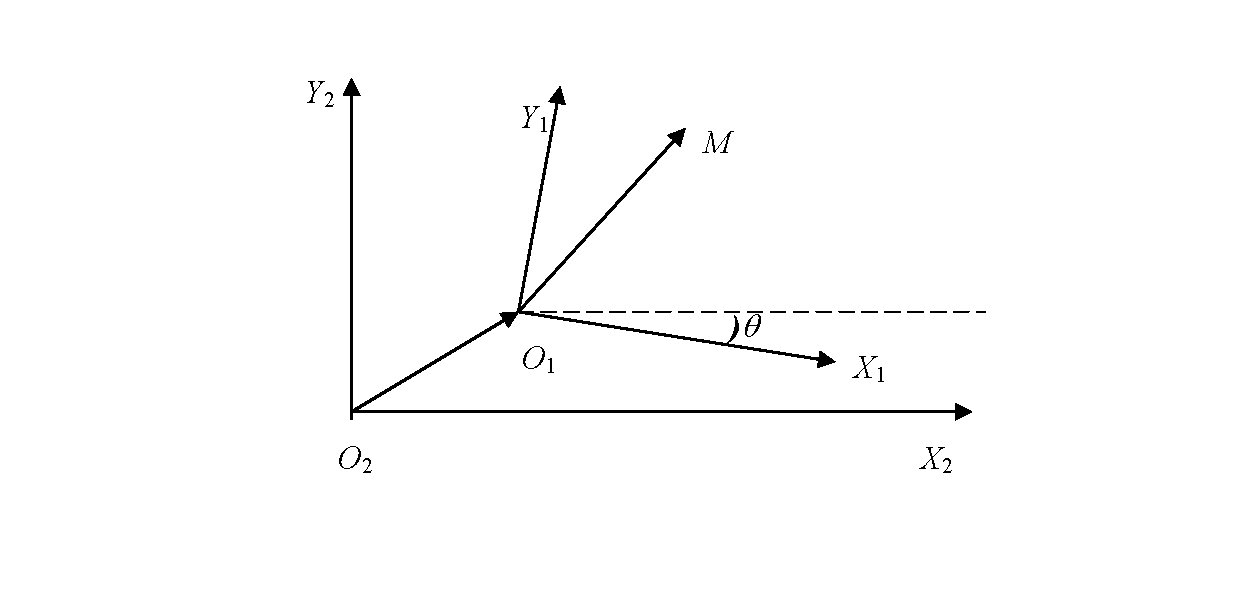 Figure 1
Figure 1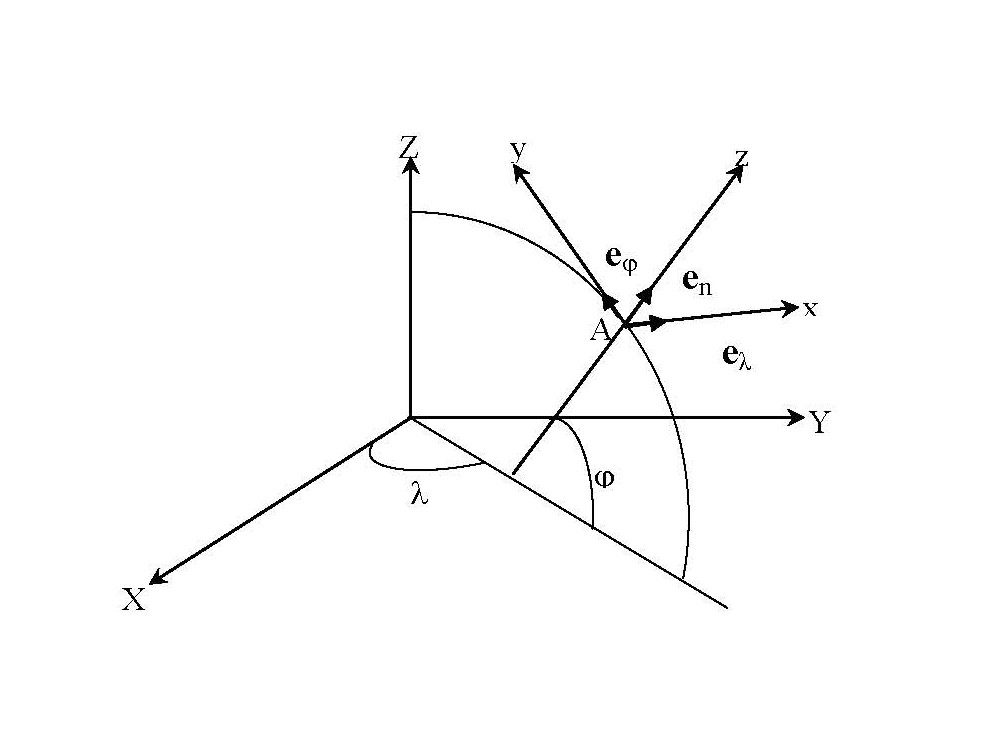 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6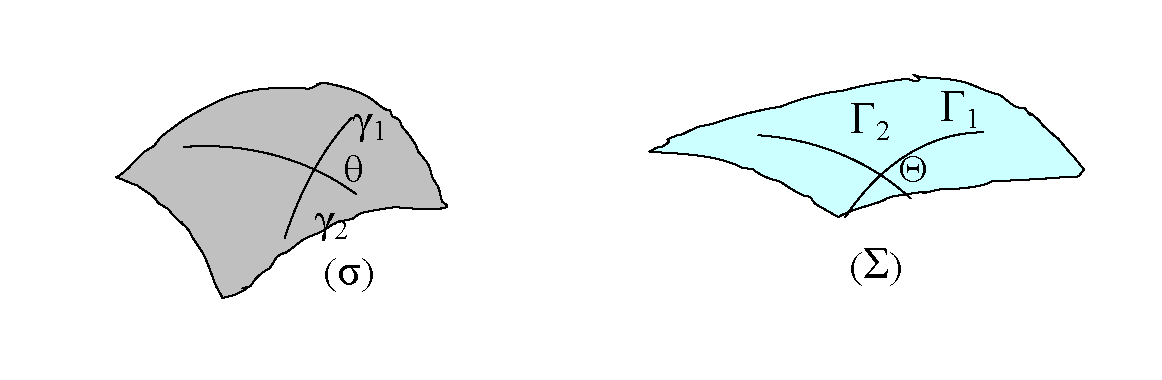 Figure 7
Figure 7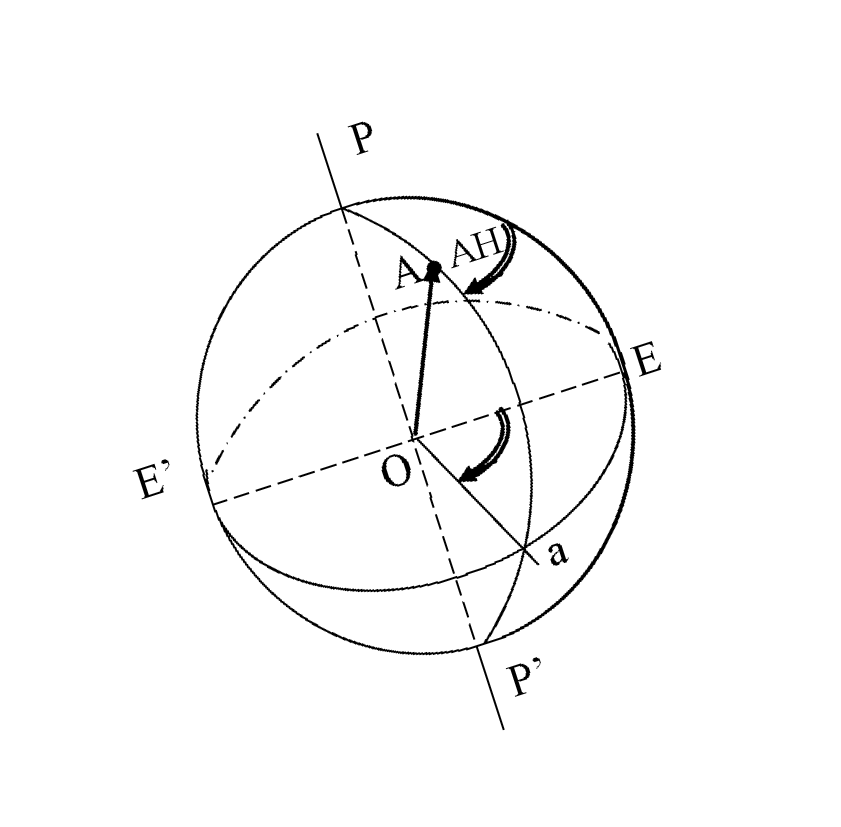 Figure 8
Figure 8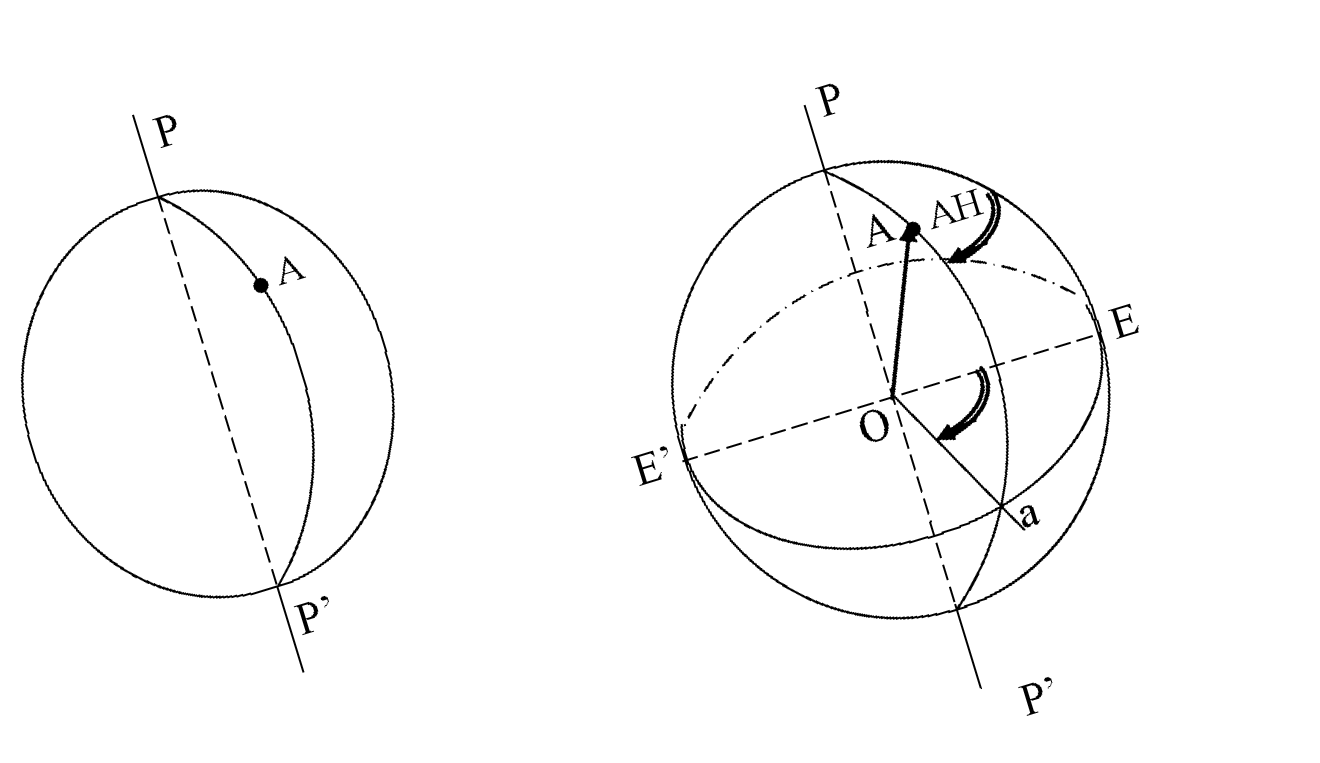 Figure 9
Figure 9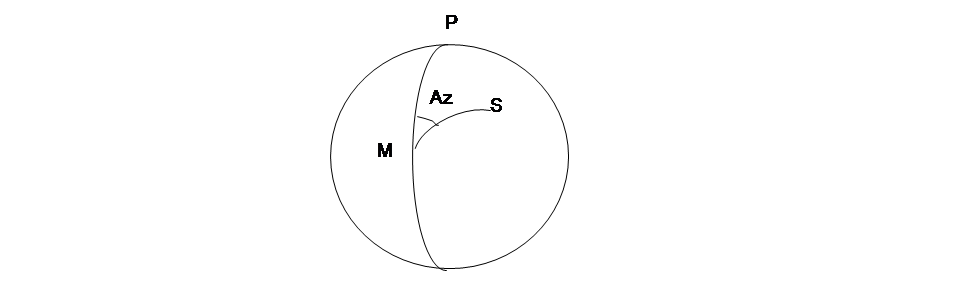 Figure 10
Figure 10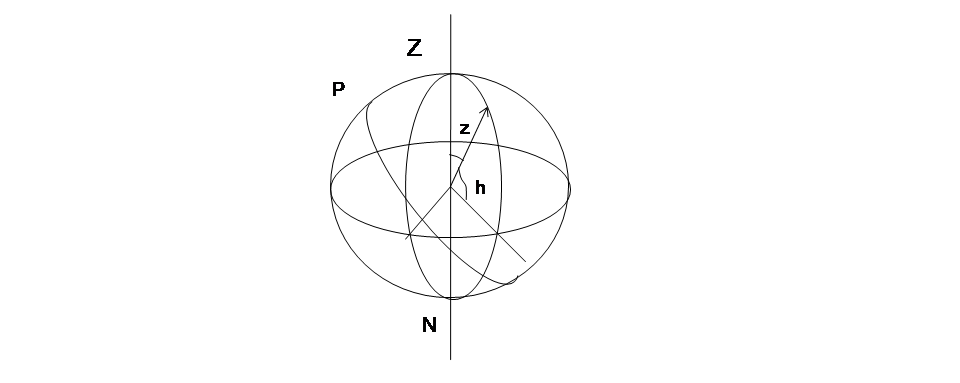 Figure 11
Figure 11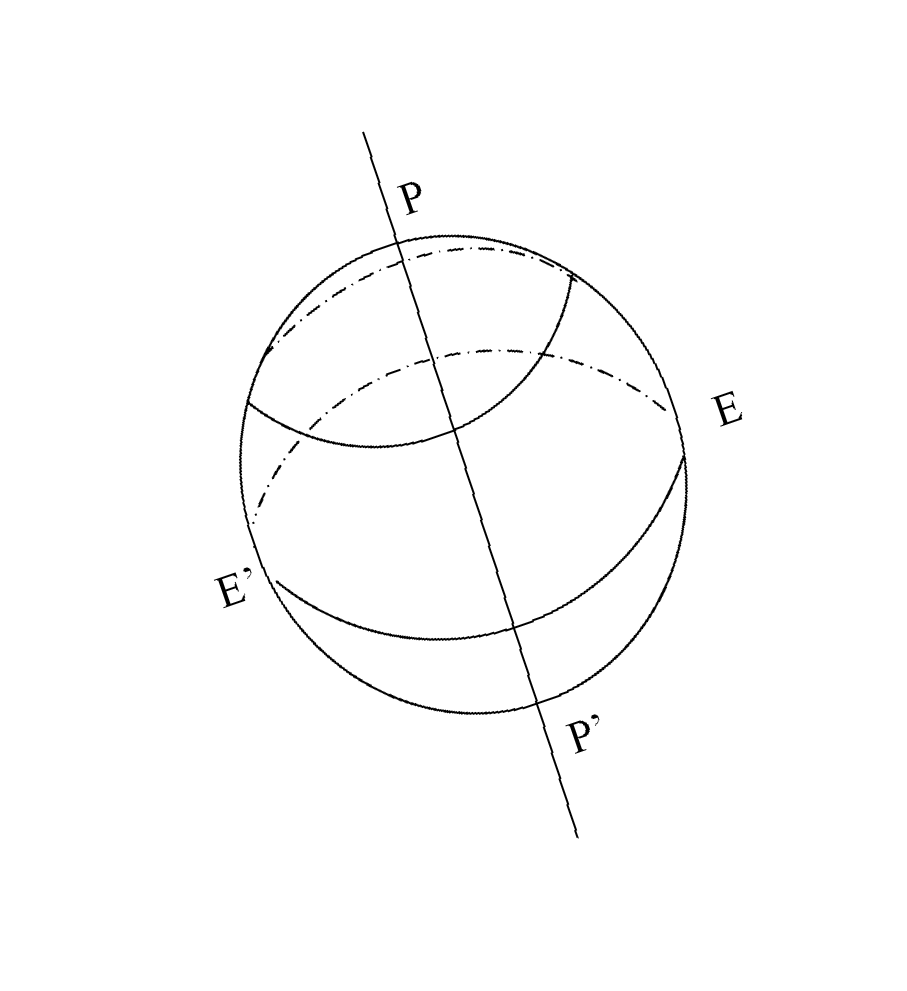 Figure 12
Figure 12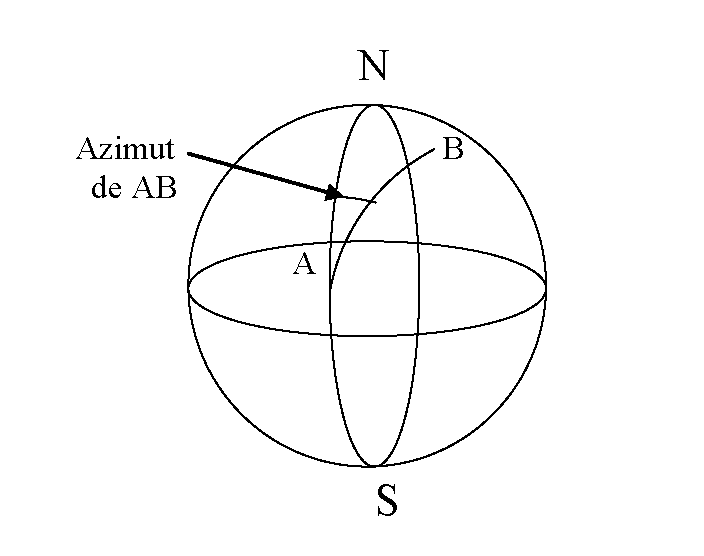 Figure 13
Figure 13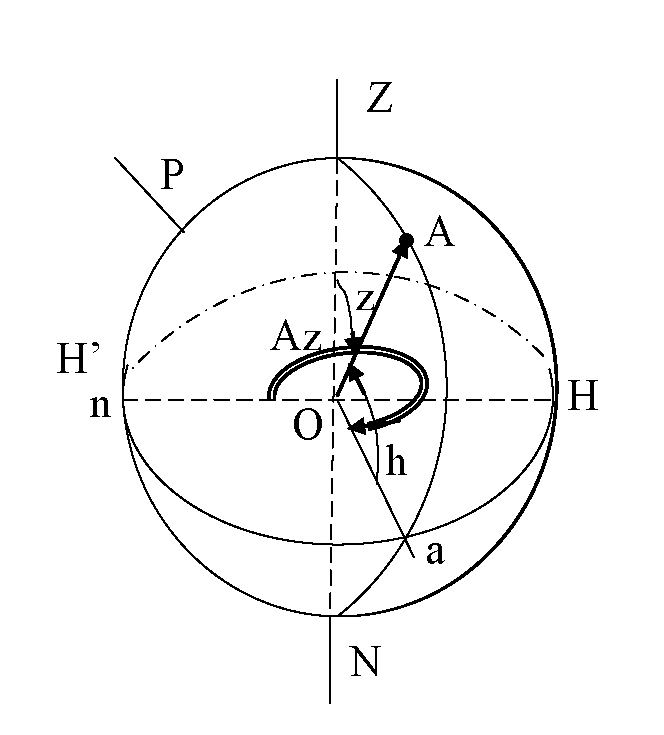 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16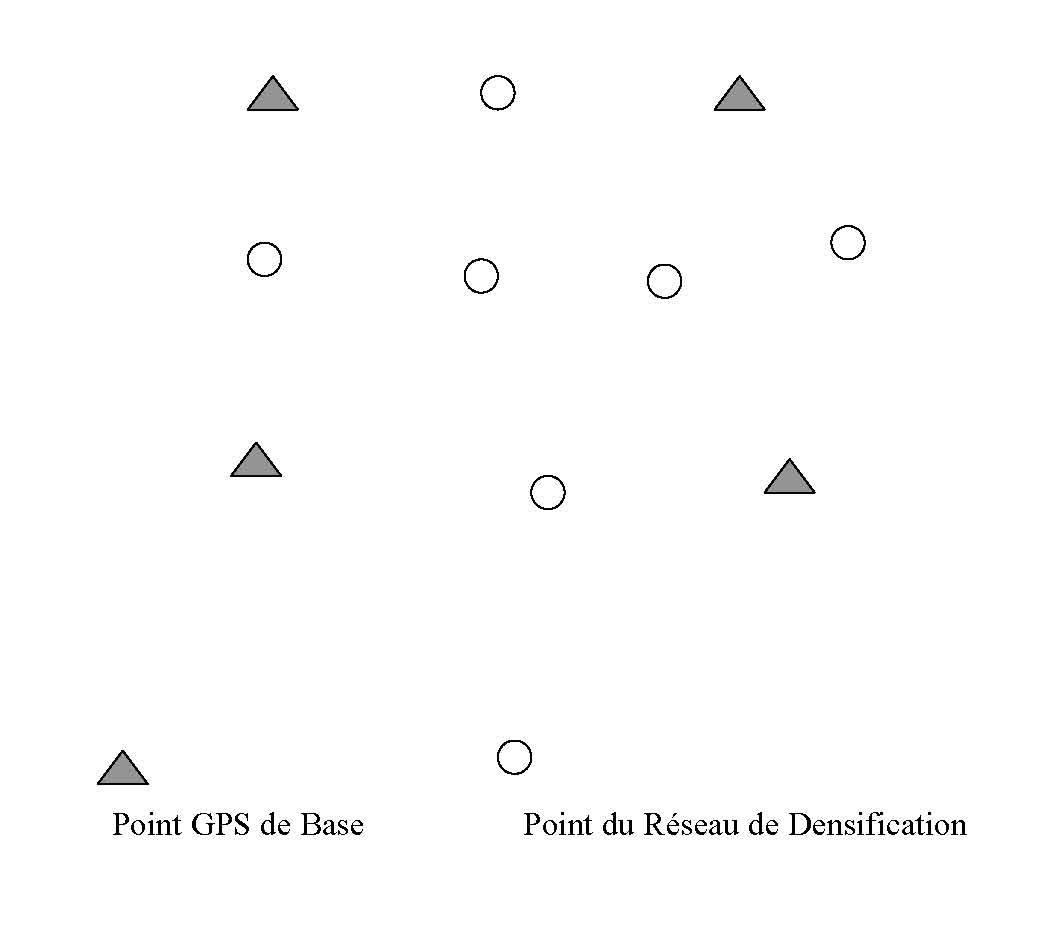 Figure 17
Figure 17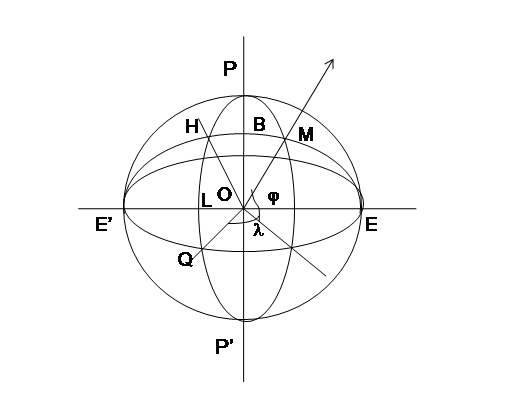 Figure 18
Figure 18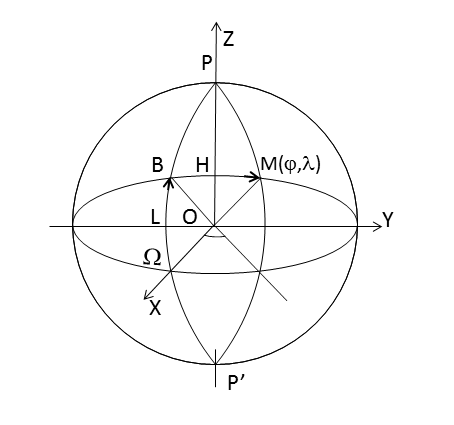 Figure 19
Figure 19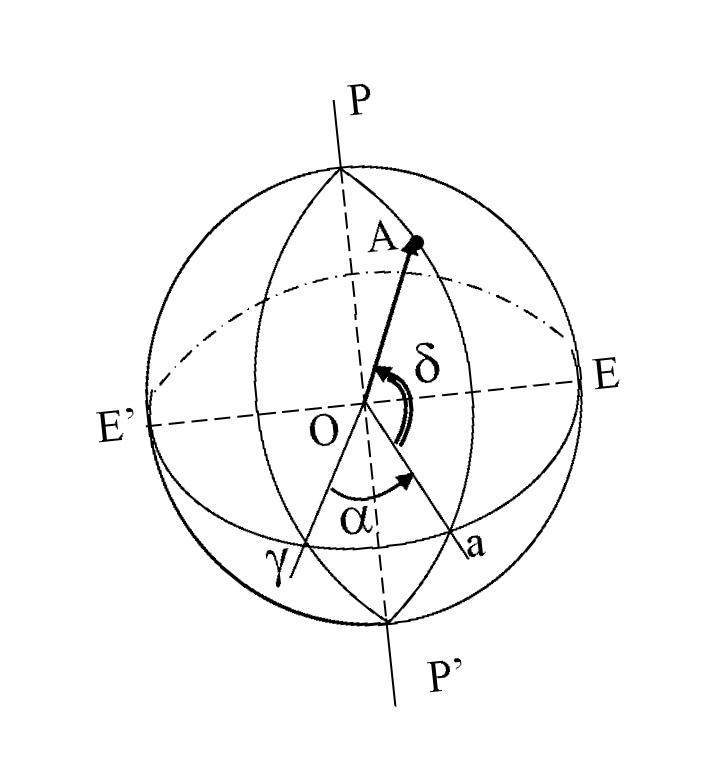 Figure 20
Figure 20 Figure 21
Figure 21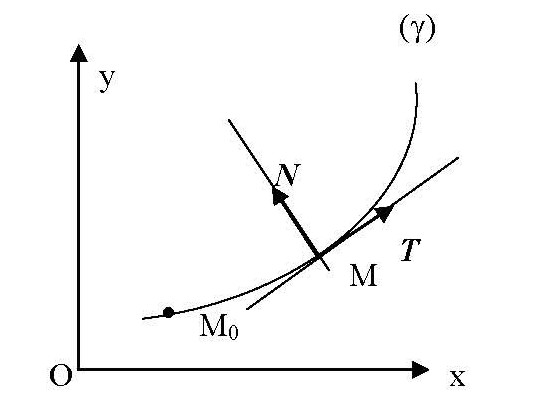 Figure 22
Figure 22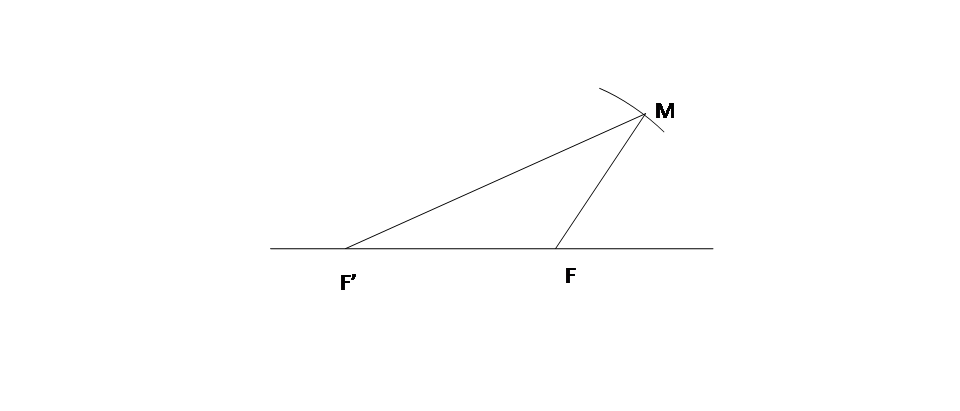 Figure 23
Figure 23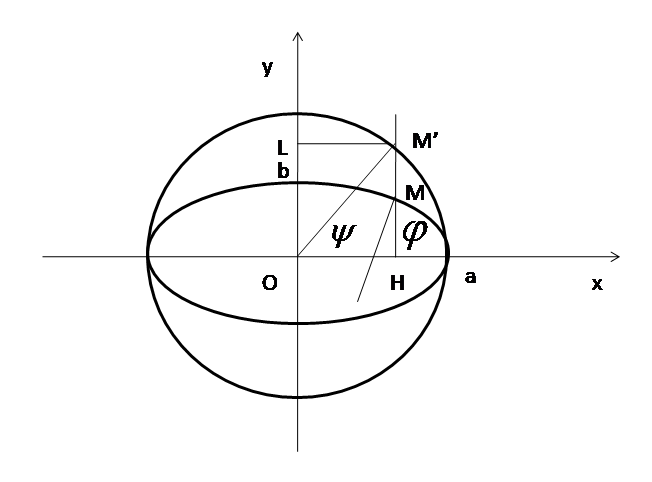 Figure 24
Figure 24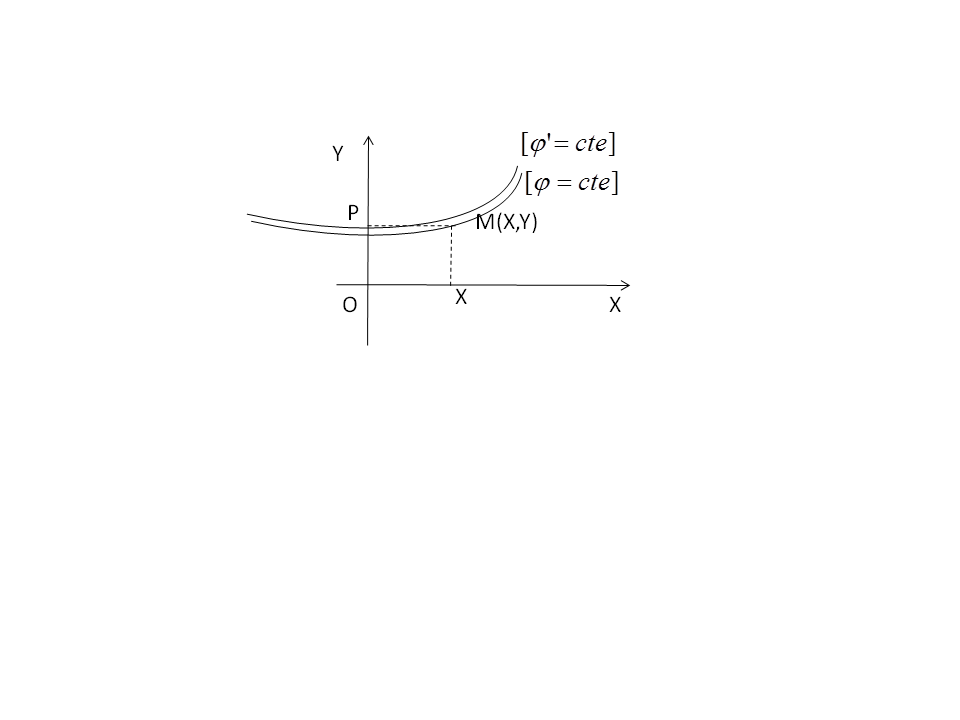 Figure 25
Figure 25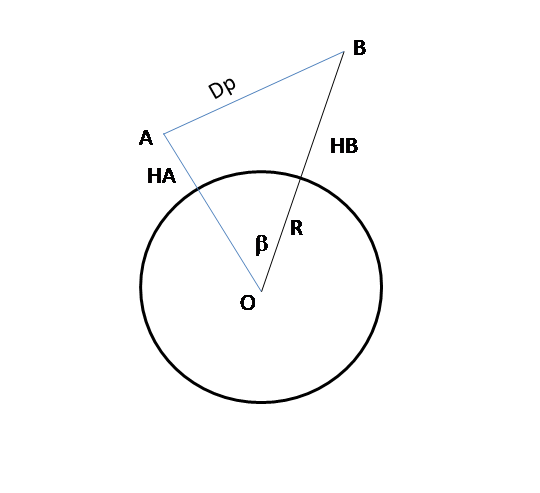 Figure 26
Figure 26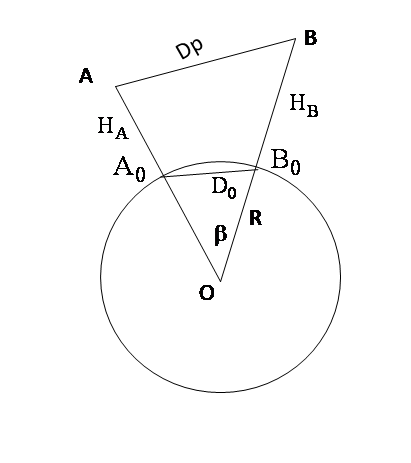 Figure 27
Figure 27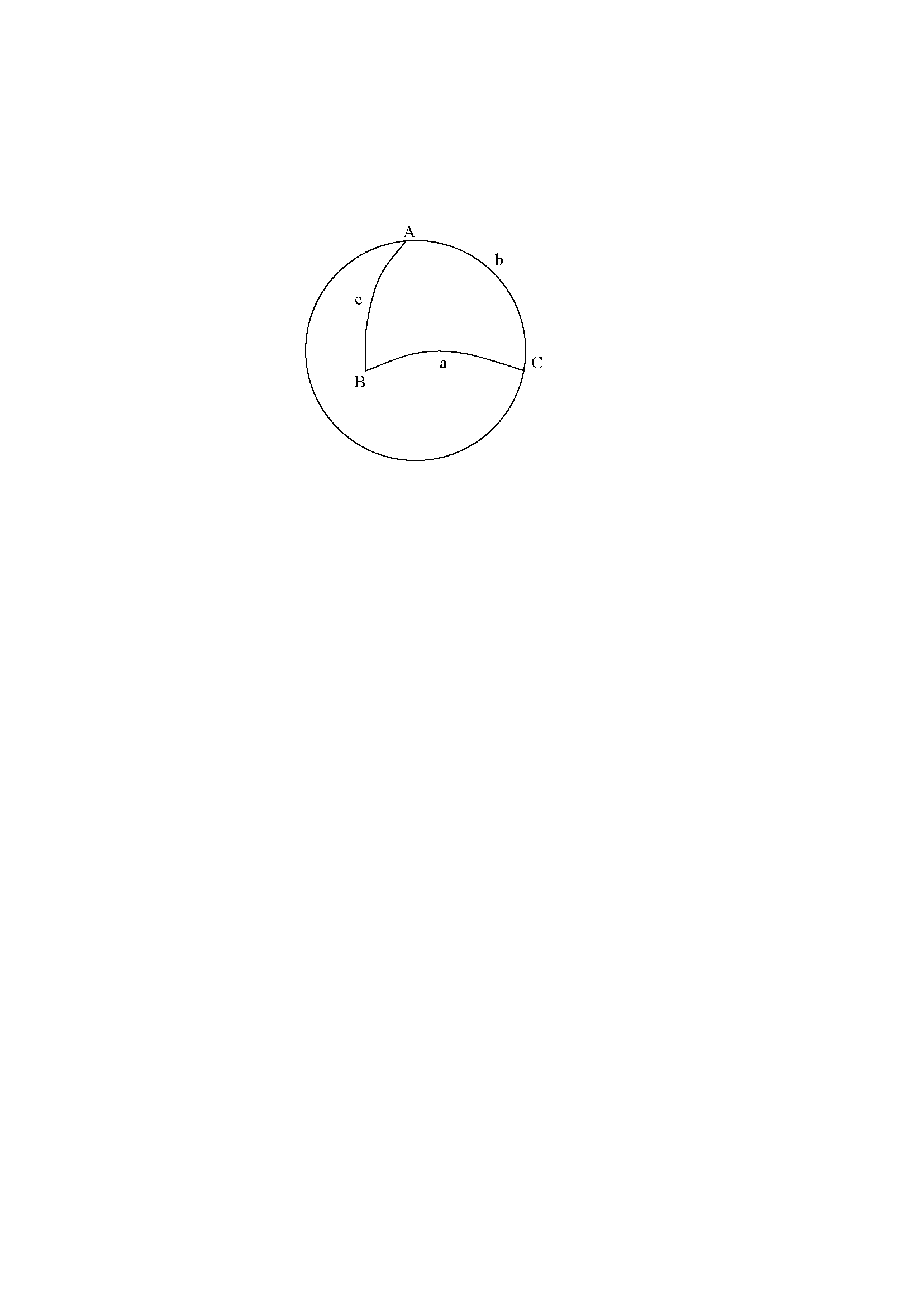 Figure 28
Figure 28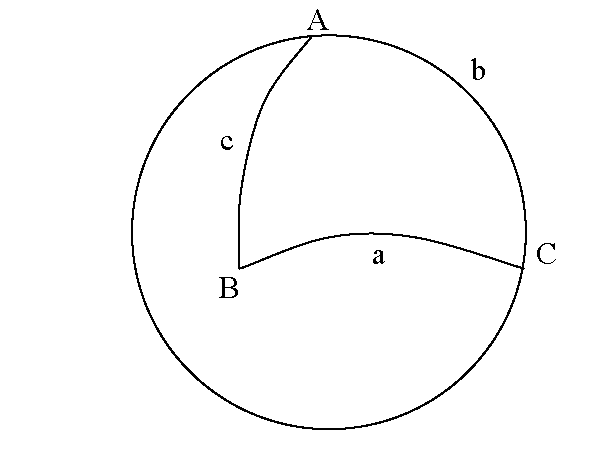 Figure 29
Figure 29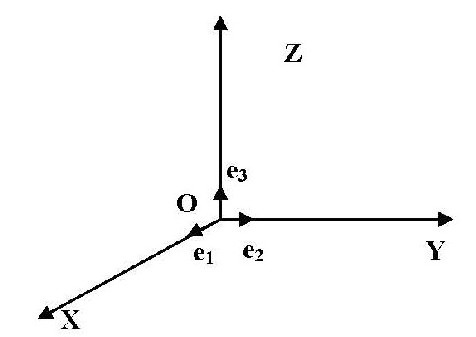 Figure 30
Figure 30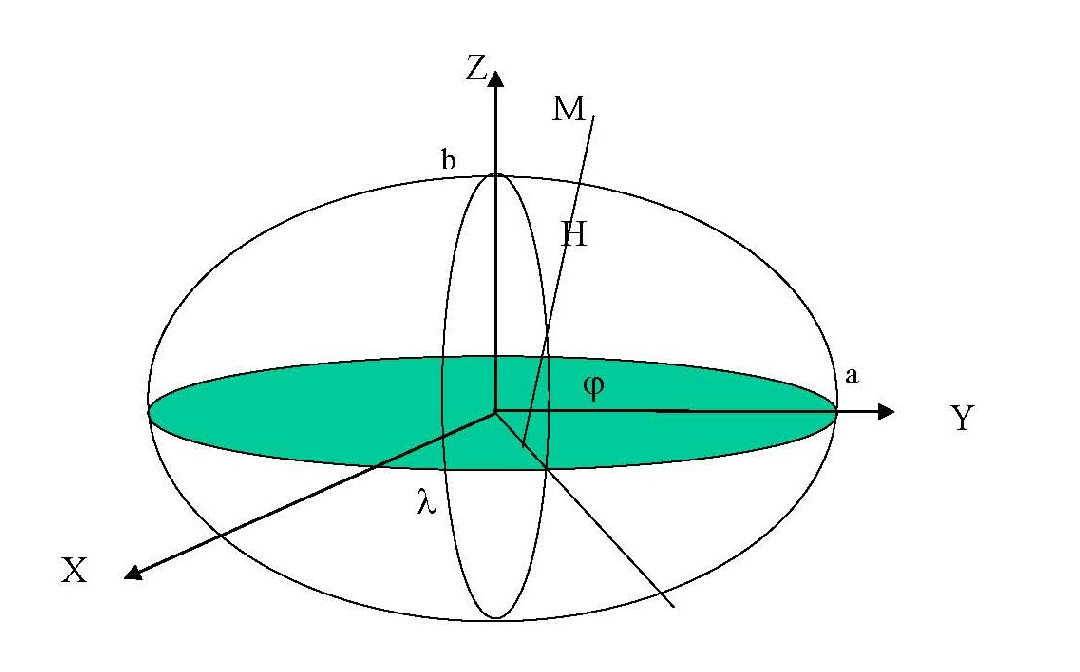 Figure 31
Figure 31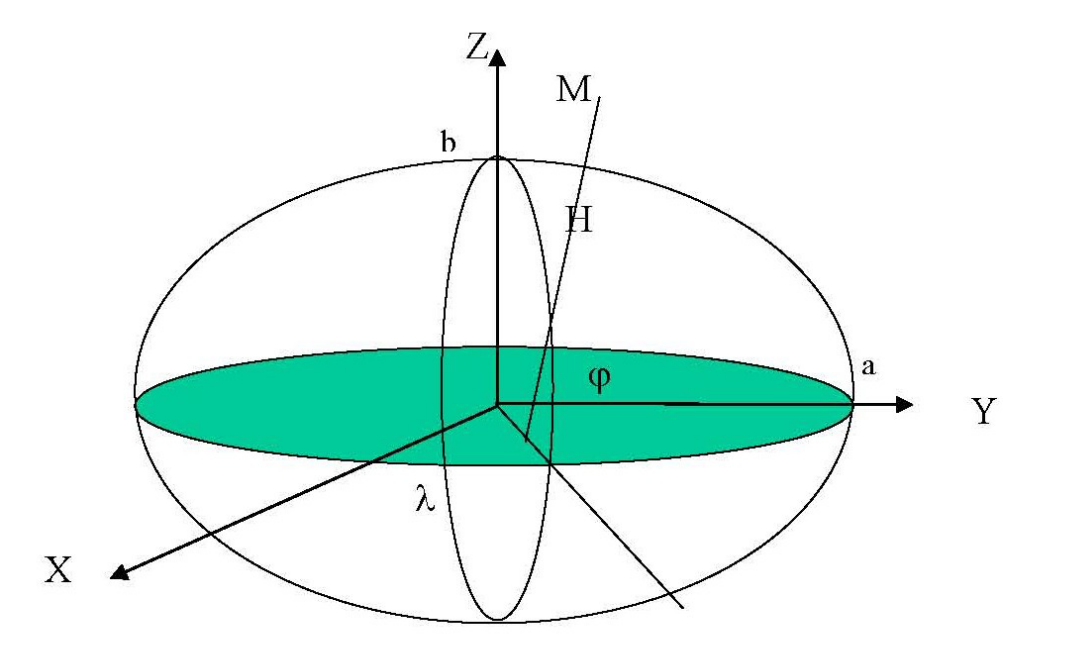 Figure 32
Figure 32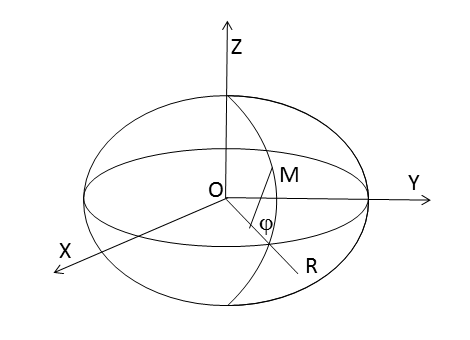 Figure 33
Figure 33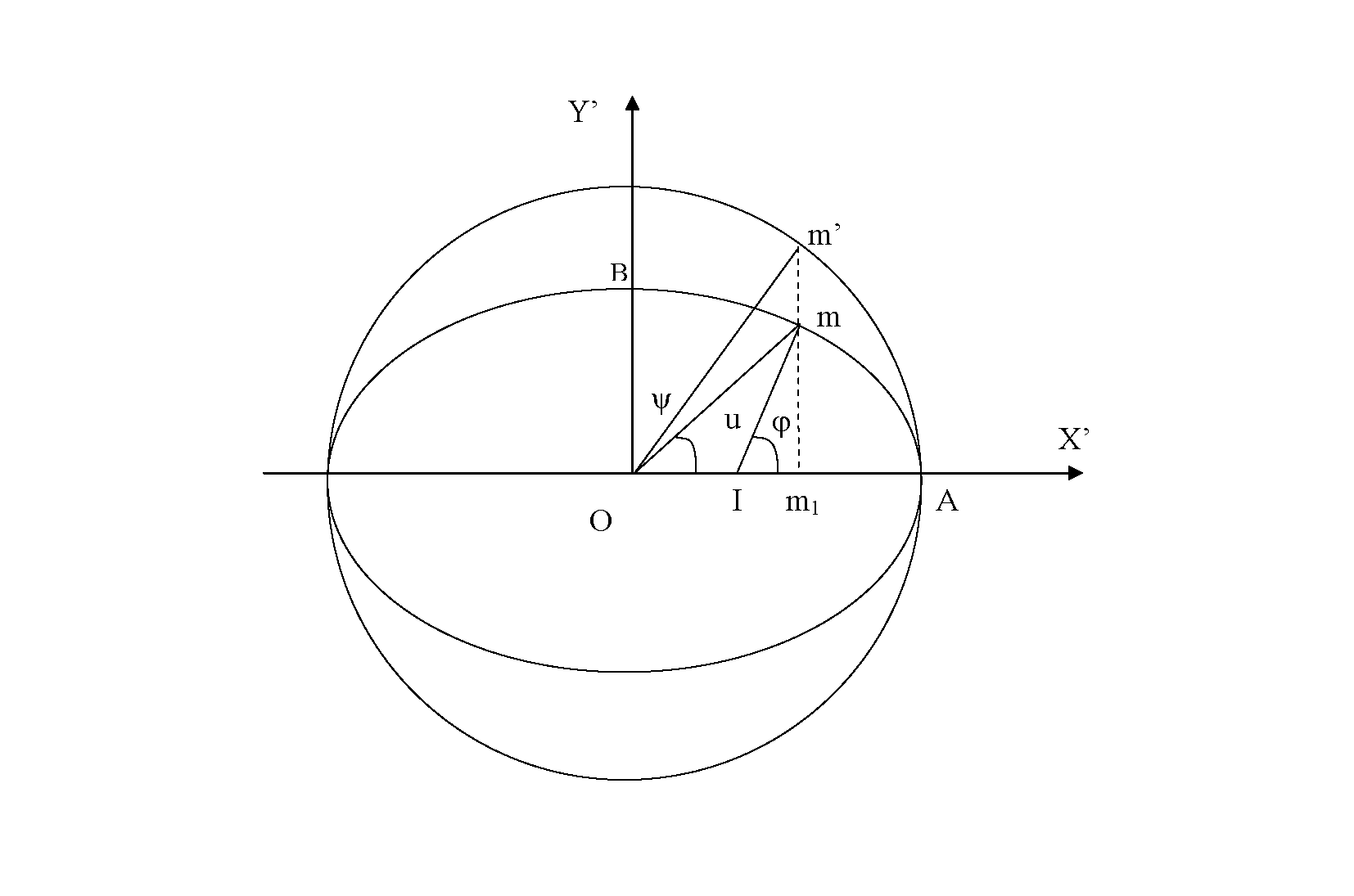 Figure 34
Figure 34 Figure 35
Figure 35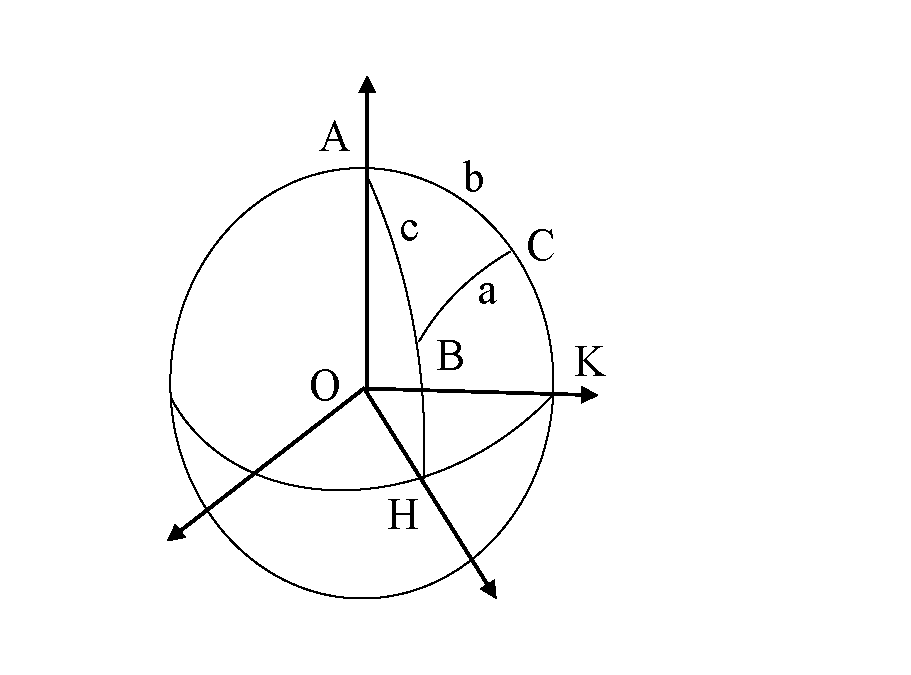 Figure 36
Figure 36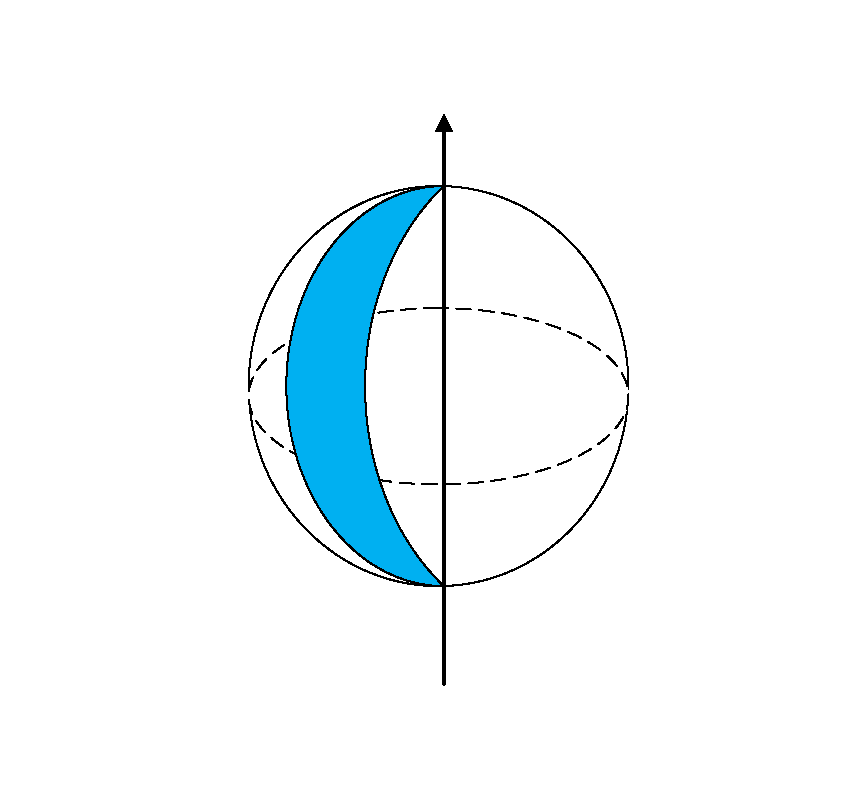 Figure 37
Figure 37 Figure 38
Figure 38 Figure 39
Figure 39 Figure 40
Figure 40Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsHistorical Geography and Cartography
**Eléments de Géodésie et de la Théorie des Moindres Carrés
**
Version provisoire - 15 décembre 2016
**Abdelmajid BEN HADJ SALEM
Ingénieur Général Géographe**
††dedicatory: }
Eléments de Géodésie et de la Théorie des Moindres Carrés
Par
**Abdelmajid BEN HADJ SALEM
Ingénieur Général Géographe**
Abdelmajid BEN HADJ SALEM
6, rue du Nil, Cité Soliman Erriadh
8020 Soliman, Tunisia
e-mail: [email protected]
© 2016 Abdelmajid BEN HADJ SALEM
center O my Lord! Increase me further in knowledge.
(Holy Quran, Surah Ta Ha, 20:114.)
mes chers parents, à ma femme, à mes enfants, à mes professeurs et à tous ceux qui m’ont apporté leur soutien.
ux martyrs et les blessés de la Révolution Tunisienne.
Préface
C’est un grand bonheur de remettre ce livre contenant un cours d’introduction à la géodésie destiné à la formation d’ingénieurs en sciences géographiques. Ce cours est le fruit de l’enseignement de la géodésie que j’ai pu donner depuis le début des années quatre vingt dix du dernier siècle aux étudiants des Instituts Supérieurs des Etudes Technologiques ou à ceux du Diplôme des Etudes Supérieures Spécialisées de Géomatique à l’Ecole Nationale des Ingénieurs de Tunis, aux étudiants de la Faculté des Sciences de Tunis sans oublier les ingénieurs et techniciens de l’Office de la Topographie et du Cadastre et tout récemment les élèves ingénieurs de l’option topographie et géomatique de l’Ecole Supérieure Privée d’Aéronautique et des Technologies de Tunis.
Cet ouvrage constitue ma modeste participation à enrichir la documentation nationale en matière des sciences géographiques ou sous l’appellation de nos jours la géomatique et en particulier concernant son pilier fondamental à savoir la géodésie. En plus de son aspect pédagogique, l’ouvrage collecte des informations que le géodésien et le géomètre pratiquant ont besoin et que souvent, elles sont dispersées.
Après un chapitre d’introduction, ce cours comprend deux parties:
- Partie I:
On présente l’essentiel de la géodésie géométrique et spatiale avec un chapitre consacré à la géodésie tunisienne et son évolution depuis un siècle de sa mise en place. L’organisation de cette première partie de l’ouvrage est comme suit.
Dans le deuxième chapitre, on démontre les principales formules de la trigonométrie sphérique.
Le troisième chapitre présente les différents éléments de l’astronomie de position liés à la géodésie et en particulier les différents systèmes de coordonnées utilisés en astronomie de position.
Le quatrième chapitre est un rappel de la géométrie des courbes, le repère de Frenêt, la théorie des surfaces, la première forme fondamentale, et les théorèmes liés aux rayons principaux de courbure d’une surface de .
La géométrie de l’ellipse et de l’ellipsoïde est l’objet du cinquième chapitre où on définit les formules des coordonnées tridimensionnelles d’un point, relatives à un ellipsoïde donné. On traite aussi les lignes géodésiques de l’ellipsoïde en présentant une méthode itérative de l’intégration de leurs équations.
Dans le sixième chapitre, on donne les définitions des systèmes et des coordonnées géodésiques ainsi que du géoïde. On présente aussi les principaux systèmes géodésiques des pays de l’Afrique du Nord.
Le septième chapitre traite les réseaux géodésiques terrestres et spatiaux. On présente leurs conceptions et réalisations. De même, les opérations de densification des réseaux terrestres et spatiaux par la technologie GPS sont traitées en donnant les principales phases.
Quant au huitième chapitre, il est consacré aux différentes corrections apportées aux distances observées lors de leurs réductions à la surface de l’ellipsoïde de référence et aux plans des représentations planes utilisées.
Le neuvième chapitre est l’un des chapitres importants de cet ouvrage où on traite les représentations planes et principalement celles qui sont conformes. Dans ce chapitre, on donne une démonstration de la condition de conformité d’une représentation plane. On présente aussi ce qu’on appelle en langage mathématique les représentations quasi-conformes en présentant un exemple.
Les chapitres dixième et onzième sont consacrés respectivement à étudier en détail les représentations planes Lambert et l’UTM en démontrant pour chacune, les différentes formules des expressions des coordonnées rectangulaires et du module linéaire.
Le datum altimétrique ainsi que les différentes définitions des systèmes d’altitudes font l’objet du douzième chapitre de l’ouvrage.
Parmi les modèles de passage entre les systèmes géodésiques, on traite en détail, dans le treizième chapitre, les modèles tridimensionnels de Bura-Wolf, de Molodensky et le modèle bidimensionnel de Helmert. On présente une méthode de détermination directe des paramètres du modèle de Bura-Wolf.
Des éléments historiques de la géodésie tunisienne sont présentés dans le quatorzième chapitre. On parlera des différents systèmes géodésiques tunisiens avant l’établissement du système NTT(Nouvelle Triangulation Tunisienne) le système géodésique terrestre officiel de la Tunisie. Ce chapitre n’a pas l’intention en tout cas de décrire l’historique de la géodésie tunisienne depuis les premiers travaux de rattachement des points géodésiques tunisiens à la géodésie italienne (C. Fezzani, 1979).
Dans le quinzième chapitre, on présente des notions sur le mouvement d’un satellite artificiel autour de la Terre avant d’entamer le positionnement par les satellites GPS objet du seizième chapitre.
La bibliographie relative à la Partie I est l’objet du dix-septième chapitre.
- Partie II:
Elle concerne une introduction à la théorie des moindres carrés pour les modèles linéaires avec une première présentation, dans un cours de géodésie destiné aux ingénieurs, de l’aspect non-linéaire de la méthode des moindres carrés. Cette deuxième partie comprend quatre chapitres en plus de la bibliographie.
En poursuivant la numérotation précédente des chapitres, le dix-huitième chapitre, le premier de la Partie II, traite les différentes définitions et théorèmes mathématiques qui seront utiles pour la théorie des moindres carrés.
Le chapitre important de la Partie II de l’ouvrage est le dix-neuvième chapitre où sont présentés les éléments fondamentaux de la théorie des moindres carrés des modèles linéaires. L’auteur a adopté la notation de P. Hottier utilisée dans son cours La Théorie des Erreurs (P. Hottier, 1980).
Le vingtième chapitre est consacré, pour la première d’un cours de la théorie des erreurs pour les ingénieurs, à l’aspect théorique de la géométrie de compensation d’un modèle non-linéaire par les moindres carrés. On rappelle les définitions nécessaires et on présente la méthode de Gauss-Newton pour la résolution du système donnant le minimum de la fonction objectif ou encore dite fonction énergie.
On termine avec le vingt-unième chapitre où on traite l’aspect géométrique des conditions obtenues pour la solution de la compensation par les moindres carrés des modèles non-linéaires.
Enfin, le chapitre vingt-deuxième constitue la bibliographie de la Partie II de l’ouvrage, suivi d’un index pour les noms propres et les mots clés cités dans tout l’ouvrage.
Quant à l’aspect pratique, des exercices et des problèmes ont été ajoutés à la fin de la plupart des chapitres. De plus, des éléments historiques ont été formulés sous forme de notes historiques pour certains chapitres.
Enfin, pour signaler toute correction à cette publication, prière de nous écrire à l’adresse: abenhadjsalemgmail.com, et merci d’avance.
Tunis, **Abdelmajid
**Décembre 2016 **Ben Hadj Salem, Dipl.-Ing.
** Ingénieur Général Géographe
Remerciements
Pour la réalisation de ce livre, nous avons profité des documents et de publications que nous citons ci-dessous à savoir (§ [17,22]):
Partie I:
-
La thèse de C. Fezzani (1979).
-
Cours de Cartographie Mathématique de J. Commiot (1979).
-
Cours de Géodésie Elémentaire de J. Lemenestrel (1980).
-
Geodesy: the Concepts de P. Vaniek et E.J. Krakiwsky (1986).
Partie II:
-
La Théorie des Erreurs de P. Hottier (1980).
-
La thèse de P.J.G. Teunissen (1985).
-
Les publications de E.W. Grafarend et B. Schaffrin (1989).
-
La publication Nonlinear Systems de P.J. Olver (2013) de l’Université de Minnesota.
Que leurs auteurs, dont certains étaient mes professeurs, trouvent ici l’expression de ma sincère gratitude.
Je voudrai aussi remercier mes collègues de l’OTC et particulièrement Messieurs les ingénieurs avec lesquels j’avait travaillé ou collaboré sans oublier mes étudiants qui avaient souvent souffert de mes cours exigeant un certain niveau mathématique.
Je suis aussi très reconnaissant à Messieurs les ingénieurs A. Boudabous, M. Charfi, C. Fezzani, M. Ben Mahmoud, K. Naouali, M. Rezgui, J. Zaiem, J. Zid, S. Kahlouche de l’Algérie et N. Rebai, Maître-assistant à l’Ecole Nationale des Ingénieurs de Tunis, pour avoir lu l’ouvrage et donné leurs commentaires et suggestions avant l’édition finale.
Tunis, **Abdelmajid
**Décembre 2016 **Ben Hadj Salem, Dipl.-Ing.
** Ingénieur Général Géographe
Contents
-
2.2 Le Trièdre Supplémentaire - Le Triangle Sphérique Polaire
-
5.5 Calcul des Lignes Géodésiques de L’Ellipsoïde de Révolution
-
5.6 Applications aux Problèmes Direct et Inverse du Calcul des Lignes Géodésiques
-
11.3 Annexe: Calcul de la longueur d’un arc de la méridienne d’un ellipsoïde de révolution
-
12.6 La Recherche des Paramètres de Passage par les Formules de MOLODENSKY
-
14.6 Les Travaux de Modernisation des Réseaux Géodésiques Tunisiens
-
15 Notions sur le Mouvement d’un Satellite Artificiel de la Terre
-
15.4 L’Influence du champ de la pesanteur sur le Mouvement du Satellite Artificiel
-
18 **Eléments Mathématiques pour La Méthode des Moindres Carrés **
-
18.3 Formulation du problème des Moindres Carrés - le Cas Linéaire
-
19.3 Poids - Matrice de Poids - Variance de la Mesure de Poids Unitaire
-
19.5 Présentation de la Méthode des Equations d’Observations
-
19.13 Méthode des Equations d’Observations avec Equations de condition
-
20.3 Les Eléments Mathématiques de l’Optimisation des Problèmes Non-Linéaires
-
21 Interprétation Géométrique de la Compensation Non-Linéaire
Part I Eléments de Géodésie
Chapter 1 Introduction
{tinted}
” Consciente des résultats extraordinaires obtenus par les institutions cartographiques nationales et les agences spatiales, les commissions géodésiques, les instituts de recherche et les universités, et d’autres organisations internationales comme la Fédération internationale des géomètres, en faisant fond sur les initiatives de l’Association internationale de géodésie, qui représente la communauté géodésique mondiale, pour ce qui est d’évaluer et de suivre au mieux les changements du système terrestre, notamment la mise au point du Repère de référence terrestre international, qui a été adopté,…”
111Extrait de la Résolution A/RES/69/266, du Repère de référence géodésique mondial pour le développement durable, adoptée par l’Assemblée Générale des Nations-Unis le 26 février 2015(UN-GGIM, 2015).
1.1 Définitions de la Géodésie
Suivant l’étymologie grecque, le mot géodésie veut dire divise la Terre. Le grand géodésien Allemand F.R. Helmert (F.R. Helmert, 1884)222Friedrich Robert Helmert (1843-1917): géodésien allemand. définissait la Géodésie comme suit " la Géodésie est la science de la mesure et de la représentation de la surface terrestre".
Une définition contemporaine de la Géodésie est donnée par le Comité Associé Canadien de Géodésie et de Géophysique (C.A.C.G.G.,1973) à savoir : la Géodésie est la discipline qui concerne la mesure et la représentation de la Terre, incluant son champ de gravité, dans un espace tridimensionnel variant avec le temps.
Une autre définition récente (2002) est :”** Geodesy is an interdisciplinary science which uses spaceborne and airborne remotely sensed, and ground-based measurements to study the shape and size of the Earth, the planets and their satellites, and their changes; to precisely determine position and velocity of points or objects at the surface or orbiting the planet, within a realized terrestrial reference system, and to apply these knowledge to a variety of scientific and engineering applications, using mathematics, physics, astronomy, and computer science.**”(M. Lemmens, 2011).
La Géodésie a ainsi deux aspects :
- un aspect scientifique et de recherches :
- la mesure des dimensions de la Terre et la détermination de sa forme géométrique.
- un aspect pratique :
-
l’établissement et la maintenance des réseaux géodésiques tridimensionnels nationaux et globaux et en tenant compte des variations de ces réseaux en fonction du temps;
-
la mesure et la représentation des phénomènes géodynamiques comme le mouvement des pôles, les marées terrestres et le mouvement de la croûte terrestre.
Dans cette première partie du livre, on s’intéresse aux réseaux géodésiques et à leurs établissements.
Un réseau géodésique est un ensemble de points dont les coordonnées sont connues avec précision dans un système de référence donné. Ces points vont servir par la suite comme points de référence pour tous les travaux topographiques et cartographiques.
Cette première partie de l’ouvrage comprendra en plus de l’introduction les chapitres suivants:
-
la trigonométrie sphérique;
-
notions d’astronomie de position;
-
courbes et surfaces;
-
géométrie de l’ellipse et de l’ellipsoïde;
-
les systèmes géodésiques;
-
les réseaux géodésiques;
-
réduction des distances;
-
les représentations planes;
-
la représentation Lambert Tunisie;
-
la représentation UTM;
-
les transformations entre les systèmes géodésiques;
-
les systèmes d’altitudes;
-
la géodésie tunisienne;
-
notions sur le mouvement d’un satellite artificiel autour de la Terre;
-
le système GPS.
Chapter 2 La Trigonométrie Sphérique
La trigonométrie sphérique établit les relations liant les grandeurs caractéristiques d’un triangle sphérique.
2.1 Le Triangle Sphérique
On considère une sphère de centre un point et de rayon l’unité et trois points sur la sphère et .
Définition 2.1
On appelle triangle sphérique la figure formée par les 3 arcs de grands cercles et inférieurs à grades (Fig. LABEL:doc11a).
Les grandeurs qui caractérisent le triangle sphérique sont :
-
les 3 côtés notés respectivement , équivalents aux angles au centre des directions soit .
-
les 3 angles dièdres des faces du trièdre notés .
On remarque que les angles et côtés du triangle sont des grandeurs mesurables par des angles.
2.2 Le Trièdre Supplémentaire - Le Triangle Sphérique Polaire
Au trièdre on associe le trièdre supplémentaire dont les arrêtes sont respectivement orthogonales aux faces . Le point est choisi tel que et soient dans la même demie sphère limitée par . Soit le point diamétralement opposé au point (Fig. 2.2). On a donc:
[TABLE]
D’où les relations:
[TABLE]
Définition 2.2
Le triangle sphérique est dit triangle polaire du triangle .
Comme le triangle est le triangle polaire de , on a :
[TABLE]
2.3 Les Formules de la Trigonométrie Sphérique
Un triangle sphérique est entièrement défini par la donnée de 3 de ses 6 éléments. Alors entre 4 éléments quelconques, il y a :
[TABLE]
relations non indépendantes comme suit :
-
3 côtés, 1 angle : 3 relations;
-
3 angles, 1 côté : 3 relations;
-
2 côtés, 2 angles(opposés aux côtés) : 3 relations;
-
2 côtés, 2 angles (adjacents aux côtés) : 6 relations.
2.3.1. Etablissement de la Formule Fondamentale
Soit un triangle sphérique , en calculant le produit scalaire de 2 manières (Fig. 2.3), on arrive à la formule fondamentale :
[TABLE]
D’où:
[TABLE]
Or:
[TABLE]
Et:
[TABLE]
D’où :
[TABLE]
En utilisant le triangle polaire, on a :
[TABLE]
Or , d’où :
[TABLE]
2.3.2. La Formule des Sinus
De (2.1), on a :
[TABLE]
Soit , on arrive à :
[TABLE]
D’où:
[TABLE]
2.3.3. Formules des Sinus Cosinus
En utilisant la formule fondamentale, on a :
[TABLE]
Et en remplaçant dans la deuxième formule, l’expression de , on obtient , d’où :
[TABLE]
2.3.4. Formule des Cotangentes
En remplaçant dans (2.4) par , on obtient :
[TABLE]
2.3.5. Cas d’un Triangle Rectangle
Pour un triangle sphérique rectangle, un des angles vaut = 100 gr = 90°. Les formules se simplifient, leur nombre est :
[TABLE]
Supposons que A = , on fait le schéma ci-dessous (Fig. 2.4).
On trouve les relations en appliquant la règle mnémonique de Nepier111John Nepier (1550 -1617): mathématicien écossais. :
Le cosinus d’un élément quelconque est égal à :
-
au produit des cotangentes des éléments adjacents;
-
au produit des sinus des éléments non adjacents.
Exemple :
-
-
.
2.4 L’Excès Sphérique
Définition 2.3
On appelle fuseau sphérique la portion de la demi sphère limitée entre deux grands cercles (Fig. 2.5).
La surface d’un fuseau sphérique d’un angle est proportionnelle à où est le rayon de la sphère, soit , pour on a d’où , on obtient :
[TABLE]
On considère maintenant un triangle sphérique ABC :
-
le fuseau donne ;
-
le fuseau donne ;
-
le fuseau donne ;
d’où :
[TABLE]
Or = la surface de la demi-sphère + 2 fois la surface du triangle sphérique . On note la surface du triangle sphérique ABC, on a alors:
[TABLE]
ou encore :
[TABLE]
Soit:
[TABLE]
2.5 Exercices et Problèmes
Exercice 2.1
Calculer l’azimut d’une étoile de déclinaison quand sa distance zénithale est de pour un observateur situé à la latitude .
Exercice 2.2
En appliquant au triangle de position les formules de trigonométrie sphérique montrer que l’on peut calculer l’angle horaire du coucher d’un astre par : .
Exercice 2.3
Soit un triangle sphérique . On donne les éléments suivants:
- ;
- ;
- ;
- ;
- .
1. Calculer .
2. Déterminer l’excès sphérique de ce triangle.
3. Calculer la fermeture du triangle , donnée par:
[TABLE]
Exercice 2.4
Soit une sphère de rayon égal à 1. Soit un carré sphérique de côté (arc de grand cercle). On note .
1. Montrer que:
[TABLE]
2. Donner l’expression de la diagonale .
Problème 2.1
Soit une sphère de rayon égal à 1 et de centre le point . Un point de a pour coordonnées . On appelle les coordonnées de Cassini-Soldner 222César-François Cassini (1714-1784): astronome et géodésien français.333Dr Johann Georg von Soldner (1776-1833): mathématicien et astronome bavarois. de les angles (Fig. 2.6):
- ;
- .
1. Déterminer les relations liant à .
2. Inversement, donner les relations liant à .
Problème 2.2
Au lieu de latitude Nord, on observe l’étoile polaire de déclinaison et d’ascension droite = .
1. Donner sur un graphique, les éléments du triangle sphérique où est le pôle Nord.
2. Sachant que l’heure sidérale locale est égale au moment de l’observation à , calculer l’angle horaire .
3. En appliquant la formule des cotangentes, montrer que l’azimut de l’étoile est donné par la formule:
[TABLE]
4. Calculer alors l’azimut z.
5. Calculer la distance zénithale de l’étoile.
Problème 2.3
Soit la sphère unité de . On considère le triangle sphérique avec:
[TABLE]
et un point quelconque de : . On appelle le grand cercle de passant par les points et .
1. Montrer que si , alors avec:
[TABLE]
*2. Exprimer la surface du triangle sphérique en utilisant l’intégrale de la fonction entre deux bornes que l’on déterminera.
*3. On introduit l’angle que fait le vecteur tangent en au grand cercle avec le vecteur tangent en au méridien passant par . Vérifier que (aide: on peut dériver, par rapport à , deux fois l’équation (2.7)).
4. En déduire la valeur de l’aire du triangle sphérique .
Chapter 3 Notions d’Astronomie de Position
3.1 Rappels Historiques
Il n’est pas possible de déterminer la période où l’homme avait commencé à s’intéresser aux étoiles et aux astres. Cependant, cet intérêt à l’astronomie s’était développé peu à peu (P. Vanick & E.J. Krakiwsky, 1986). Ainsi, les astronomes chinois s’étaient occupés de l’observation des astres et des étoiles (observation d’une éclipse solaire 2667 avant J.C.), de même pour les peuples habitants la région des rivières le Tigre et l’Euphrate, les peuples d’Egypte et les Grecs. On trouve par exemple Thales de Miletus qui prédit l’éclipse solaire en mai 685 avant J.C. Eratosthenes (276-194 avant J.C.) calcula la circonférence de la Terre (39000 km), l’astronome et mathématicien Hipparque (190-120 avant J.C.) avait trouvé les plus importantes irrégularités du mouvement apparent du soleil et de la lune et il découvrit la précession (mouvement du pôle).
L’astronome Claude Ptolémée (80-168) avait compilé toutes les théories d’astronomie de l’époque que les Arabes avaient traduit en un ouvrage appelé "Al-Megiste". La civilisation islamique a apporté aussi sa contribution dans les connaissances astronomiques surtout sous les règnes d’Abu Jaafar Al Mansour (754-775), Haroun Al Rachid (786-809) et Abu Jaafar Al Mamoun (812-833). Parmi les astronomes arabes, on cite : Mohamed Ibn Jabir Al Battani (mort en 929) qui avait fait des catalogues astronomiques des mouvements des planètes. Ses travaux furent traduits en latin et imprimés à Nuremberg (Allemagne) en 1537. Il calcula la durée de l’année solaire à 2 mn près.
Ibn Al Haitam (965-1039), dit Al Hazan en Europe, avait étudié la réfraction de l’atmosphère et calcula l’altitude de l’atmosphère pour la première fois. On cite aussi Abu Rayhan Al Biruni (973-1055) qui était aussi un éminent astronome en plus de ses travaux en mathématiques. Nassireddine Al Tusi (1201-1274) construisit le premier observatoire moderne et de plus, il avait développé la trigonométrie sphérique.
Au 15ème siècle, c’est le commencement de l’intérêt en Europe à l’astronomie grâce au monde Arabe. Nicolas Copernic (1473-1543) a démenti la théorie qui dit que la Terre est le centre de l’Univers et a démontré que le soleil est le centre du système solaire. Tycho-Brahé (1546-1609) l’éminent astronome danois a adhéré à la théorie de Plotémé avant l’invention du télescope. Johannes Kepler (1571-1630) découvrit la forme elliptique des orbites des planètes. Galileo Galilée (1564-1642) astronome italien, était le premier qui a fait usage du télescope. Isaac Newton (1642-1727) mathématicien et physicien anglais découvrit la loi de la Gravitation (1660).
L’astronomie a connu un grand essor au 18ème siècle grâce aux mathématiciens de cette période comme Leonhard Euler (1707-1783), Joseph-Louis Lagrange (1736-1813) et aussi à la création des observatoires astronomiques comme ceux de Paris en 1667 par Jean Dominique Cassini (1625-1712) et de Greenwich en 1675. Edmont Halley (1656-1742) avait compilé un catalogue des positions de l’hémisphère Sud et détecta une comète en 1682 que porta son nom après sa mort.
Actuellement l’astronomie s’est avancée grâce à l’introduction de nouvelles méthodes telles que la photographie ou l’analyse spectrale, et l’envoi des satellites artificiels dont le premier a été lancé en octobre 1957.
3.2 Objectifs de l’Astronomie
Pour le géodésien, l’astronomie est un moyen de détermination de certaines inconnues du point stationné à partir d’observations sur les astres ou des étoiles. Les observations astronomiques effectuées dans ce cadre déterminent la verticale physique du point de l’observation, celle-ci étant matérialisée par l’axe de rotation de l’instrument. L’astronomie physique fournit comme résultat la distribution des verticales aux différents points stationnés. Si on assimile la verticale à la normale à la surface modèle de référence, on peut alors localiser ces points. On parlera alors d’astronomie de position. En géodésie tridimensionnelle, l’astronomie donne la direction de la tangente à la ligne de force du champ de pesanteur au point considéré.
Cependant, la géodésie ne peut se détacher de l’astronomie. En effet, il a toujours fallu, pour placer les points sur la sphère ou l’ellipsoïde de référence ou dans un trièdre trirectangulaire, fixer les axes des coordonnées. Alors un des axes privilégiés est l’axe de rotation de la Terre. Ce dernier n’est pas matérialisé sur la surface topographique, mais il apparaît dans l’observation du mouvement de la Terre ou dans l’observation des étoiles. Donc, le géodésien est nécessairement astronome. Alors, les observations astronomiques permettent en géodésie de déterminer :
-
les 2 inconnues fixant la direction de la verticale physique du lieu (,);
-
l’orientation d’une direction (l’azimut);
-
les coordonnées absolues d’un premier point d’un réseau géodésique appelé aussi point fondamental.
3.3 Les Systèmes de Référence
Le principe fondamental des déterminations astronomiques repose sur le fait que dans le repère lié aux étoiles, celles-ci occupent des positions pratiquement fixes, qu’il est possible de calculer et de les regrouper en catalogues d’étoiles. Un catalogue d’étoiles comprend les coordonnées équatoriales célestes (,) des étoiles observées, réduites à une époque moyenne conventionnelle. Un catalogue fondamental est issu de la compilation de plusieurs catalogues provenant de préférence d’observations absolues.
Le système pratique de référence est défini par le catalogue fondamental, adopté à l’échelle internationale. Le catalogue fondamental FK4 était publié en 1963. Le catalogue le plus récent est le FK6 daté de 2000. Il est imprimé en deux volumes regroupant les données de 4150 étoiles.
3.4 Notions d’Astronomie de Position
3.4.1. Sphère Céleste - Mouvement Diurne
Définition 3.1
La sphère céleste est une sphère de rayon infiniment grand sur laquelle sont projetées les perspectives des étoiles (Fig. 3.1).
On appelle constellation la figure formée par les étoiles.
En regardant les étoiles, on s’aperçoit que les étoiles se déplacent dans leur ensemble : c’est le mouvement diurne (F. Tisserand & H. Andoyer, 1912).
Le mouvement diurne obéit à 3 lois:
-
la sphère céleste tourne autour d’un de ses diamètres;
-
le mouvement s’effectue dans le sens rétrograde (non direct);
-
le mouvement est uniforme et sa période est voisine de .
3.4.2. Définitions:
Définition 3.2
L’axe du monde est le diamètre autour duquel la sphère céleste effectue son mouvement.
Pôles célestes : P, P’; P pôle nord, P’ pôle sud.
Définition 3.3
L’équateur céleste est le grand cercle perpendiculaire à l’axe du monde. L’intersection de la sphère céleste par un plan parallèle à EE’ est un parallèle céleste. Un parallèle céleste est la trajectoire des étoiles en mouvement diurne. (Fig. 3.1)
Définition 3.4
La verticale d’un lieu est la direction donnée par un fil à plomb: Z c’est le zénith, N c’est le nadir. L’horizon est le grand cercle dont le plan est perpendiculaire à ZN (Fig. 3.2).
Définition 3.5
Le plan méridien d’un lieu est le plan défini par la verticale et l’axe du monde (Fig. 3.3). Le méridien d’un lieu c’est un grand cercle intersection du plan méridien et de la sphère céleste. Le méridien est local.
Le demi-méridien supérieur : c’est le plan passant par PP’ et contenant le zénith.
La trajectoire de l’étoile rencontre le méridien en deux points S et I:
-
S est le passage supérieur (le plus près du zénith) ou culmination;
-
I est le passage inférieur.
La trajectoire de l’étoile rencontre en général l’horizon en deux positions:
- •
L: est le lever, où l’étoile devient visible;
- •
C: est le coucher où l’étoile disparaît.
Les étoiles qui n’ont ni coucher, ni lever sont appelées étoiles circumpolaires.
Définition 3.6
Le plan vertical est un plan contenant la verticale ZN.
Définition 3.7
On appelle vertical d’un astre le plan vertical passant par l’astre (Fig. 3.4).
Définition 3.8
Le méridien est le vertical passant par le pôle; il rencontre l’horizon en un point n: c’est le Nord géographique, le point opposé au Nord c’est le Sud. Dans la direction perpendiculaire, on a l’Est et l’Ouest. L’Est se trouve à droite de la ligne Sud-Nord.
Pour un astre : le lever dans l’Est, à partir de la culmination il passe dans la région Ouest c’est le coucher.
3.4.3. Rappels d’Unités de Mesures des Arcs
On rappelle que le radian est l’unité internationale des mesures des angles. On donne ci-dessous les autres unités utilisées.
3.4.4. Systèmes de Coordonnées Locales Horizontales (Fig. 3.5)
Définition 3.9
L’azimut d’un astre est l’angle formé par le vertical du l’astre et le plan méridien. Il est compté à partir du Nord dans le sens rétrograde (en grades).
[TABLE]
Définition 3.10
La hauteur d’un astre est l’angle entre la direction de l’astre et l’horizon, compté à partir de ce dernier, positivement vers le zénith et négativement vers le nadir (en degrés). On le note par .
[TABLE]
Définition 3.11
La distance zénithale z est l’angle de la verticale avec la direction de l’astre, se compte du zénith vers le nadir.
On a :
[TABLE]
3.4.5. Coordonnées Géographiques
Soit M un point de la surface de la Terre.
Définition 3.12
La latitude géographique est l’angle du plan de l’équateur avec la verticale du lieu, positivement vers le pôle Nord, négativement vers le pôle Sud.
Définition 3.13
La longitude géographique est l’angle formé par le méridien origine avec le méridien du lieu. Le méridien origine est le méridien passant par l’observatoire de Greenwich. est comptée positivement vers l’Est en grades, degrés ou en heures.
3.4.6. Angle Horaire - Coordonnées Equatoriales Célestes - Temps Sidéral -
Définition 3.14
Le cercle horaire d’un astre est le demi-grand cercle passant par le pôle et l’astre (Fig. 3.7).
Le cercle horaire passant par le zénith c’est le méridien supérieur.
Définition 3.15
L’angle horaire d’un astre en un lieu donné est l’angle formé par le méridien supérieur du lieu et le cercle horaire de l’astre. Il se compte en heures dans le sens rétrograde à partir de la culmination (Fig. 3.7).
[TABLE]
Coordonnées Equatoriales Célestes
Pour positionner le cercle horaire de l’astre A, on considère un astre fictif situé sur l’équateur. On prendra comme origine le cercle horaire de (Fig. 3.8).
Définition 3.16
L’ascension droite est l’angle entre le cercle horaire de et le cercle horaire de l’astre, compté dans le sens direct, en heures, il mesure l’arc (Fig. 3.8).
Définition 3.17
La déclinaison est l’angle du plan de l’équateur avec la direction de l’astre, compté à partir de l’équateur positivement vers P, négativement vers P’. mesure (Fig. 3.8).
(,) constituent les coordonnées équatoriales célestes. Elles sont indépendantes du temps.
Heure Sidérale Locale (HSL)
Définition 3.18
On appelle en un lieu donné et à un instant donné l’angle horaire de l’astre . C’est l’angle formé par le méridien supérieur et le cercle horaire de (Fig. 3.9).
[TABLE]
Définition 3.19
Un jour sidéral: c’est l’intervalle de temps qui sépare 2 culminations successives du point . Il se divise en 24 heures sidérales.
Relation Fondamentale de l’Astronomie de Position
A partir de la figure (3.10), on a:
[TABLE]
Or:
[TABLE]
Comme , on a donc:
[TABLE]
Par suite, on obtient la relation fondamentale de l’astronomie de position:
[TABLE]
Au moment de la culmination, on a:
[TABLE]
3.4.7. Calcul de l’heure sidérale locale
Soit un point de la Terre de longitude . Soit l’heure sidérale locale du lieu de . Si on fait intervenir l’heure sidérale locale de Greenwich qu’on note , on a la relation (Fig. 3.11):
[TABLE]
3.4.8. Les Principales échelles de temps
Parmi les variables primordiales de l’astronomie de position figure la variable temps. Le temps définit une échelle continue à partir d’une origine qu’on définit par convention. La mesure de l’unité de la variable temps varie d’une définition à une autre. On présente ci-après les principales échelles de temps.
Le Temps Atomique International :
C’est l’étalon de temps fourni par les horloges atomiques (temps uniforme par définition). Il n’est plus rattaché à un mouvement de rotation uniforme, mais plutôt à la période de radiation de l’atome de césium 133. La seconde: c’est l’unité du Système International dont voici la définition:
Définition 3.20
La seconde est la durée de périodes de la radiation correspondant à la transition entre les niveaux hyperfins de l’état fondamental de l’atome de césium 133.
Temps Terrestre : Il découle du mouvement de révolution de la Terre (temps quasi-uniforme), il s’est substitué depuis 1991 au Temps Dynamique Terrestre . assure la continuité en 1984 avec le Temps des Ephémérides . On a la relation suivante à la précision de la milliseconde :
[TABLE]
Le Temps Universel : On définit :
-
(Temps Universel "Primaire") découle du mouvement de rotation de la Terre autour de son axe instantané de rotation (temps non uniforme connu a posteriori);
-
C (Temps Universel Coordonné) est une approximation linéaire continue par morceaux de dont il s’écarte au maximum de (temps uniforme par paliers);
-
diffère de d’un nombre entier de secondes, ce jour111En vigueur à compter du 1er juillet 2012 à jusqu’à nouvel avis (Cf. bulletin C 43 de l’IERS). :
[TABLE]
- A la précision considérée , (Temps Universel) désigne indifféremment ou .
3.4.9. Le passage du temps au temps sidéral et vice versa
Notons et respectivement le temps sidéral et le temps on a les formules suivantes (A. Danjon, 1980):
[TABLE]
Application: calcul de à une certaine heure à un lieu de longitude , on a:
[TABLE]
3.5 Exercices et Problèmes
Exercice 3.1
Au lieu de latitude Nord, on veut calculer les hauteurs et de l’étoile polaire de déclinaison respectivement à son passage supérieur et à son passage inférieur au méridien du lieu. Déterminer et .
Problème 3.1
1. En un lieu de latitude quelles sont les étoiles :
- qui ne se couchent pas ( qui sont toujours visibles);
- qui ne sont jamais visibles.
Traiter le cas : lieu dans l’hémisphère nord.
2. Quelle est la condition pour qu’une étoile culmine au zénith ?
3. Cas particulier du soleil: la déclinaison du soleil varie de à au cours de l’année. On appelle jour le moment pendant lequel le soleil est au-dessus de l’horizon, nuit lorsque le soleil est au-dessous de l’horizon, midi l’instant de la culmination, minuit l’instant du passage inférieur.
a) Montrer qu’au moment des équinoxes le jour et la nuit sont d’égale durée quel que soit le lieu.
b) Montrer qu’à l’équateur, quelle que soit la date le jour et la nuit sont d’égale durée.
c) Au moment du solstice d’hiver quels sont les lieux :
- où il fait constamment jour;
- où il fait constamment nuit.
Mêmes questions au moment du solstice d’été.
d) Quels sont les lieux de la Terre où le soleil culmine au zénith au moment du solstice d’hiver. Même question au moment du solstice d’été.
e) Quels sont les lieux de la Terre où au moins une fois dans l’année le soleil culmine au zénith.
Problème 3.2
Une station astronomique est située en un lieu de coordonnées géographiques : .
En ce lieu, on observe une étoile de coordonnées équatoriales:
**
L’observation se fait le jour de l’équinoxe de printemps le 21 mars à [math] heure L’heure sidérale de Greenwich est .
1. Calculer l’heure sidérale locale du lever et du coucher de l’étoile au lieu considéré.
2. En déduire l’heure du lever et du coucher de l’étoile au lieu considéré.
*Remarque: on choisira le coucher qui a lieu après le lever. *
Problème 3.3
En un lieu de latitude et de longitude , on cherche à pointer la galaxie d’Andromède de coordonnées équatoriales le 31 juillet 1992 à
On donne l’heure sidérale de Greenwich à le 31/07/1992:
1. Calculer l’heure sidérale locale à
2. En déduire l’angle horaire de la galaxie.
3. Calculer la distance zénithale de la galaxie à
4. Calculer son azimut à cette même heure.
Problème 3.4
En un lieu de l’hémisphère Nord de latitude , on mesure la longueur de l’ombre portée , à midi vrai (passage du soleil au méridien), par une tige verticale dont l’extrémité est sur le sol supposé horizontal.
1. Donner l’expression en fonction de et de la distance zénithale du soleil.
2. Donner l’expression de en fonction de et de :
- aux équinoxes;
- aux solstices.
3. Quelle doit être la déclinaison du soleil et en quels lieux, pour que l’on ait ?
4. En un lieu de latitude en quelles saisons peut on avoir .
5. Si on déplace le long d’un méridien, en restant dans l’hémisphère Nord, existe-t- il au cours de l’année des lieux où , ou devient infiniment grand.
Chapter 4 Courbes et Surfaces
{svgraybox}
He who understands geometry may understand anything in this world.
Galileo Galilée (1564 - 1642)
4.1 Courbes Planes - Courbure
Définition 4.1
Une courbe plane () est une application de entièrement déterminée par la donnée d’une fonction vectorielle d’un paramètre :
**
où la base orthonormée du plan .
4.1.1. Longueur d’un arc de la courbe
L’élément élémentaire de longueur d’un arc est la quantité telle que:
[TABLE]
avec et désignent les dérivées de et par rapport à la variable , d’où :
[TABLE]
Soit pour , le point origine de l’arc, d’où en intégrant , on obtient :
[TABLE]
De l’équation (4.1), on peut exprimer en fonction de . On peut alors adopter comme paramètre la longueur d’un arc de d’origine c’est-à-dire (l’abscisse curviligne) et de considérer la courbe définie par .
4.1.2. La Tangente
Au point , la courbe admet une tangente définie par le vecteur unitaire T:
[TABLE]
4.1.3. Normale et Courbure
Définition 4.2
La dérivée de T par rapport à (lorsqu’elle existe et n’est pas nulle) définit une direction orthogonale à la tangente portant le vecteur unitaire N dite la normale au point . On a alors :
[TABLE]
avec:
[TABLE]
* est appelé rayon de courbure au point .*
4.2 Courbes Gauches
4.2.1. Trièdre de Frenêt111Jean Frédéric Frenêt (1816-1900): mathématicien, astronome et météorologue français.-Courbure-Torsion
Définition 4.3
Une courbe gauche est une application de entièrement déterminée par la donnée d’une fonction vectorielle OM(t) d’un paramètre :
[TABLE]
4.2.2. Longueur d’un arc de la courbe
L’élément élémentaire de longueur d’un arc est la quantité telle que
[TABLE]
avec et désignent les dérivées de et par rapport à la variable , d’où :
[TABLE]
Soit pour , le point origine de l’arc, d’où en intégrant , on obtient :
[TABLE]
De l’équation (4.6), on peut exprimer en fonction de . On peut alors adopter comme paramètre la longueur d’un arc de d’origine c’est-à-dire (l’abscisse curviligne) et de considérer la courbe gauche définie par .
4.2.3. La Tangente
Au point , la courbe admet une tangente définie par le vecteur unitaire T.
[TABLE]
4.2.4. La Normale - Courbure
Définition 4.4
La dérivée de T par rapport à , lorsqu’elle existe et n’est pas nulle, définit une direction orthogonale à la tangente portant le vecteur unitaire N dite la normale au point . On a alors :
[TABLE]
avec:
[TABLE]
* est appelé rayon de courbure .*
En effet, . Donc: le vecteur T est orthogonal à .
4.2.5. Binormale
Définition 4.5
La binormale est la droite passant par le point et de direction le vecteur B défini par :
[TABLE]
On a évidemment : = 1. Le triplet est direct et forme un trièdre dénommé le trièdre de Frenêt.
Définition 4.6
Les plans définis par les vecteurs , et sont appelés respectivement plan osculateur, plan normal et plan rectifiant.
4.2.6. Torsion
On calcule la dérivée du vecteur B par rapport à , on obtient:
[TABLE]
car T et sont colinéaires, par conséquent est orthogonal à T. Comme B est unitaire, est aussi orthogonal à B, donc est colinéaire à N. On pose:
[TABLE]
Définition 4.7
Le réel est appelé torsion de au point .
On calcule la dérivée du vecteur N. Comme , on obtient:
[TABLE]
donc:
[TABLE]
Les trois relations exprimant les dérivées premières des vecteurs du repère de Frenêt peuvent s’écrire sous forme matricielle:
[TABLE]
4.3 Surfaces
Définition 4.8
Une surface de est une application d’un domaine à fait correspond un triplet où x,y,z sont des fonctions continues des deux paramètres :
[TABLE]
Donc .
Si la fonction est dérivable dans le domaine , on peut définir en tout point de un plan tangent et une normale.
Soient et les deux vecteurs dérivées au point avec:
[TABLE]
Alors l’équation du plan tangent est définie par :
[TABLE]
est un point courant du plan tangent. On pose:
[TABLE]
un vecteur unitaire porté par la normale à la surface au point .
Les paramètres sont dits les coordonnées curvilignes sur la surface . Une courbe tracée sur la surface est définie par une relation ou par ; avec un paramètre. En particulier, les courbes constante et constante sont dites les courbes coordonnées.
4.4 La Première Forme Fondamentale
L’élément linéaire sur la surface est la distance de deux points infiniment voisins, le carré de est le carré scalaire de soit :
[TABLE]
Or :
[TABLE]
Par suite :
[TABLE]
On pose :
[TABLE]
alors s’écrit:
[TABLE]
(4.19) est dite la première forme fondamentale, elle définit la métrique de la surface .
4.4.1. Ecriture matricielle de la première forme fondamentale
On appelle la matrice carrée telle que:
[TABLE]
Soit:
[TABLE]
Alors l’équation (4.19) s’écrit sous la forme:
[TABLE]
La matrice s’appelle la matrice du tenseur métrique.
4.4.2. Angles de deux courbes coordonnées et Elément d’aire
- On a : , d’où:
[TABLE]
et en considérant :
[TABLE]
On pose parfois:
[TABLE]
soit:
[TABLE]
Par suite, le vecteur unitaire normal n a pour expression :
[TABLE]
- En considérant maintenant le parallélogramme curviligne de sommet et de côtés les vecteurs et , alors l’élément infinitésimal d’aire a pour expression:
[TABLE]
On le note aussi:
[TABLE]
4.4.3. Coordonnées Orthogonales et Coordonnées Symétriques
Les coordonnées sont dites orthogonales si , soit , donc est un angle droit.
Les coordonnées orthogonales sont dites coordonnées symétriques si de plus . Alors la première forme quadratique s’écrit:
[TABLE]
Exemple:
On considère une sphère de rayon qu’on note , elle est paramétrée par:
[TABLE]
avec . Les courbes coordonnées de sont les méridiens et les parallèles . On remarque qu’elles se coupent en un angle droit. On calcule la première forme fondamentale de la sphère:
[TABLE]
D’où:
[TABLE]
justifie ce qui a été dit ci-dessus sur l’orthogonalité des courbes coordonnées. Ces dernières sont orthogonales mais non symétriques. En effet :
[TABLE]
La variable telle que :
[TABLE]
forme avec un couple de coordonnées symétriques, car :
[TABLE]
est appelée latitude croissante ou **latitude ou variable de Marcator222Gerhardus Mercator (1512-1594): cartographe, astronome et ingénieur belge. Son nom était donné à la représentation cylindrique conforme proposée par lui-même. **. On pose:
[TABLE]
d’où:
[TABLE]
De (4.27), on obtient vérifiant :
[TABLE]
On se restreint à où . L’équation (4.29) s’écrit:
[TABLE]
car , donc:
[TABLE]
D’où :
[TABLE]
Soit l’expression de la latitude en fonction de :
[TABLE]
4.5 La Deuxième Forme Fondamentale
On calcule maintenant le vecteur la différentielle seconde de OM. On a alors :
[TABLE]
soit :
[TABLE]
car . On peut écrire l’équation précédente sous la forme :
[TABLE]
Soit une courbe tracée sur la surface , définie par où désigne l’abscisse curviligne. Soit n le vecteur normal à la surface et N le vecteur unitaire porté par la normale principale à la courbe . Si T est le vecteur porté par la tangente à au point , d’après les formules de Frenêt, on a :
[TABLE]
où est la courbure de au point . Or , par suite :
[TABLE]
On multiplie vectoriellement l’équation (4.32) par le vecteur normal unitaire n, on obtient :
[TABLE]
On pose :
[TABLE]
(4.34) s’écrit alors :
[TABLE]
On multiplie aussi l’équation (4.33) par le vecteur n d’où :
[TABLE]
Soit l’angle formé par n et N, d’où :
[TABLE]
Comme (4.36) est égal à (4.37), on obtient :
[TABLE]
soit :
[TABLE]
ou encore :
[TABLE]
avec la première forme fondamentale et l’expression :
[TABLE]
est appelée la deuxième forme fondamentale. D’où:
Théorème 4.1
Le produit de la courbure en un point donné d’une courbe tracée sur une surface dans l’espace à trois dimensions par le cosinus de l’angle entre la normale à la surface et la normale principale à la courbe est égale au rapport de la deuxième et la première formes fondamentales du vecteur tangent à la courbe en ce point.
Définition 4.9
La quantité invariante pour toutes les courbes ayant même vecteur tangent T en un point donné est dite la courbure normale de la surface en ce point.
Proposition 4.1
Si la courbe est la section d’une surface par un plan normal, on a :
[TABLE]
4.5.1. Trièdre de Darboux333Jean Gaston Darboux (1842-1917): mathématicien français. - Ribaucour444Albert Ribaucour (1845-1893): ingénieur et mathématicien français.
Soit une courbe tracée sur une surface pour laquelle on sait définir en un point donné le repère de Frénet .
Définition 4.10
On appelle repère de Darboux - Ribaucour le repère orthonormé formé par les vecteurs T, n et le vecteur .
La position relative des deux repères est donnée par l’angle :
[TABLE]
4.5.2. Section Normale
Définition 4.11
Soit la courbe tracée sur et définie comme intersection de et du plan passant par le point et de directions n et T, alors est appelée section normale de en dans la direction T.
La normale principale de est la droite portée par le vecteur n. Si est le rayon de courbure de au point , on a par définition :
[TABLE]
par suite :
[TABLE]
or (4.33) donne :
[TABLE]
d’où :
[TABLE]
soit :
[TABLE]
En comparant l’équation ci-dessus avec l’équation (4.38), on obtient :
[TABLE]
D’où le deuxième théorème de Meusnier555Jean Baptiste Meusnier (1754-1793): militaire, géomètre et mathématicien français. :
Théorème 4.2
Le rayon de courbure d’une courbe tracée sur une surface et ayant même tangente de direction T est égal au produit de rayon de courbure de la section normale par le cosinus de l’angle entre les vecteurs n et N.
4.5.3. Indicatrice de Dupin666Charles Dupin (1784-1873): ingénieur et mathématicien français.
On considère le repère orthonormé au point défini par les vecteurs :
[TABLE]
Définition 4.12
L’indicatrice de Dupin est l’ensemble des points du plan tangent en vérifiant :
[TABLE]
quand T varie autour de .
Soit un point dans , on a alors:
[TABLE]
d’où :
[TABLE]
En utilisant la deuxième forme quadratique, on a :
[TABLE]
ou encore :
[TABLE]
C’est l’équation d’une conique (ellipse, parabole, hyperbole) suivant le signe du discriminant ou respectivement (négatif, nul ou positif).
4.5.4. Les Directions principales
On suppose que .
Définition 4.13
On appelle directions principales les directions des axes de symétrie de l’indicatrice de Dupin.
Définition 4.14
On appelle les rayons de courbure principaux et les rayons de courbure normale dans les deux directions principales.
Les directions principales sont orthogonales.
4.5.5. Formule d’Euler777Leonhard Euler (1707-1783): mathématicien et physicien suisse.
En supposant que l’indicatrice de Dupin est une ellipse d’équation :
[TABLE]
où sont les 2 rayons de courbure normale principaux, on peut écrire :
[TABLE]
avec , or: , avec l’équation (4.46), on obtient alors la formule d’Euler :
[TABLE]
D’où:
Théorème 4.3
(Formule d’Euler):La courbure de la section normale en un point donné est égale à:
[TABLE]
où sont les courbures principales au point considéré et l’angle sur la surface entre le vecteur tangent à la section normale et la direction principale correspondante.
Définition 4.15
Le produit des courbures principales est la courbure de Gauss888Carl Friedrich Gauss (1777-1855): mathématicien et géomètre prussien, fondateur de la théorie des surfaces. ou courbure totale de la surface et la courbure moyenne la somme des courbures principales.
Pour la première forme fondamentale , on a déjà noté (4.20):
[TABLE]
et concernant la deuxième forme fondamentale donnée par l’équation (4.39), elle peut s’écrire sous la forme:
[TABLE]
où par abus de notation, on a noté par la matrice ci-dessus.
Alors, on annonce les deux théorèmes suivants sans les démontrer (B. Doubrovine - S. Novikov - A. Fomenko, 1982):
Théorème 4.4
La courbure totale en un point d’une surface est égale au rapport des déterminants de ses deuxième et première formes fondamentales:
[TABLE]
et:
Théorème 4.5
La courbure moyenne en un point d’une surface est égale à la trace de la matrice :
[TABLE]
Note historique: La théorie des surfaces élaborée par Gauss était surtout influencée essentiellement par son travail comme géomètre topographe dans le Royaume de Hannover au Nord de l’Allemagne durant la période 1821-1825. En 1822, il présenta son mémoire intitulé " General solution of the problem of mapping parts of a given surface onto another given surface in such a way that image and pre-image become similar in their smallest parts", à la Société Royale des Sciences à Copenhague (Danemark) où il recevait un prix officiel.
Où se réside donc l’importance de son mémoire? Ce dernier concernait l’étude du problème de cartographier une surface sur une autre en satisfaisant certaines propriétés. C’est le problème de base de la cartographie. Parmi les représentations planes dites abusivement projections sont celles qui conservent les angles ou représentations conformes. Elles ont un aspect pratique pour la navigation maritime. Ainsi, Gauss avait réussi à trouver une procédure pour déterminer toutes les représentations conformes localement pour les surfaces analytiques. Il ajouta dans le titre de son mémoire cette phrase en latin:
Ab his via sterniture ad maiora.
soit " De là, le chemin de quelque chose plus importante est préparé ". En effet, Gauss présentait en octobre 1827 une théorie générale des surfaces à travers son papier " Disquisitiones generales circa superficies curvas999Voir aussi (P. Dombrowski, 1979). " (Investigations about curved surfaces). L’important résultat de son papier est le théorème egregium dit encore le théorème merveilleux. Ce dernier dit que la courbure de Gauss est une propriété intrinsèque pour les surfaces de dimension 2. La courbure de Gauss dépend des composantes du tenseur métrique et de ses dérivées partielles premières et secondes par rapport aux coordonnées locales. (E. Zeidler, 2011)
4.6 Exercices et Problèmes
Exercice 4.1
Soit la surface paramétrée par dans telle que:
[TABLE]
1. Calculer l’expression de .
2. Montrer que l’équation cartésienne de est:
[TABLE]
Exercice 4.2
Soit la surface d’Enneper101010Surface paramétrée par le mathématicien allemand Alfred Enneper (1830-1885).:
[TABLE]
1. Montrer que:
[TABLE]
2. Calculer un vecteur unitaire normal à la surface.
3. Montrer que la surface d’Enneper est de courbure moyenne nulle en chaque point.
Exercice 4.3
On suppose que la métrique d’une surface donnée est:
[TABLE]
1. Montrer alors que l’expression de la courbure totale est:
[TABLE]
′* désigne la dérivation partielle.*
Problème 4.1
Soit l’ellipse définie par les équations paramétriques:
[TABLE]
On pose:
[TABLE]
1. Calculer la position sur l’axe des abscisses des deux points et appelés foyers tels que .
2. Montrer que le produit des distances des foyers à la tangente à l’ellipse en M est indépendant de .
3. Donner l’expression de .
4. Déterminer les expressions des vecteurs unitaires T et N et en déduire le rayon de coubure de l’ellipse.
5. Montrer qu’il passe par deux cercles tangents en ce point à la courbe et centrés sur respectivement (appelés cercles surosculateurs).
6. Que deviennent ces cercles lorsque est un sommet de l’ellipse.
Problème 4.2
Soit la courbe définie par les formules:
[TABLE]
1. Calculer l’abscisse curviligne d’un point quelconque de cette courbe lorsqu’on prend pour origine des arcs l’origine des coordonnées et qu’on prend pour sens des arcs croissants celui des croissants.
2. Déterminer au point les vecteurs unitaires du trièdre de Frenêt.
3. Calculer le rayon de courbure et les coordonnées du centre de courbure.
4. Evaluer la torsion en .
Problème 4.3
On définit une surface par les équations:
[TABLE]
1. Calculer les composantes des vecteurs et .
2. Calculer les coefficients de la première forme fondamentale de la surface .
3. En déduire l’expression de .
4. Les coordonnées sont-elles orthogonales? symétriques?
5. Calculer un vecteur normal de .
Problème 4.4
On définit une surface par les équations:
[TABLE]
avec deux constantes positives.
1. Calculer les composantes des vecteurs et .
2. Calculer les coefficients de la première forme fondamentale de la surface .
3. En déduire l’expression de .
4. Les coordonnées sont-elles orthogonales? symétriques?
5. Calculer un vecteur unitaire normal n de .
6. Calculer les vecteurs :
[TABLE]
On pose:
[TABLE]
7. Calculer les coefficients et .
Problème 4.5
On considère la surface définie par les équations:
[TABLE]
avec est une fonction définie de classe de .
1. Donner le domaine de définition de la surface .
2. Montrer que les courbes coordonnées constituent une famille de courbes planes de et que leur plan coupe sous un angle constant.
3. Calculer les composantes des vecteurs et .
4. Calculer les coefficients de la première forme fondamentale de la surface .
5. En déduire l’expression de .
6. Les coordonnées sont-elles orthogonales? symétriques?
7. On suppose pour la suite que , calculer un vecteur unitaire normal n de .
8. Calculer les vecteurs :
[TABLE]
On pose:
[TABLE]
9. Calculer les coefficients et .
10. En déduire l’expression des courbures moyenne et totale.
Problème 4.6
Soit la surface définie paramétriquement par:
[TABLE]
avec et sont respectivement le cosinus et la tangente hyperboliques définies par:
[TABLE]
1. Donner le domaine de définition de la surface .
2. Calculer les composantes des vecteurs et .
3. Calculer les coefficients de la première forme fondamentale de la surface .
4. En déduire l’expression de .
5. Les coordonnées sont-elles orthogonales? symétriques?
6. Calculer un vecteur unitaire normal n de .
7. Calculer les vecteurs :
[TABLE]
On pose:
[TABLE]
8. Calculer les coefficients et .
9. Déterminer les coubures moyenne et totale.
Problème 4.7
Montrer que les courbures totale et moyenne en un point d’une surface paramétrée par , où est une fonction lisse, sont données par:
[TABLE]
et:
[TABLE]
Problème 4.8
Soit une surface de paramétrée par telle que sa première forme fondamentale s’écrit:
1. Montrer que les conditions suivantes sont équivalentes:
i) - ,
ii) - le vecteur est parallèle au vecteur normal à la surface,
iii) - les côtés opposés de tout quadrilatère curviligne formés par les courbes coordonnées ont même longueurs.
2. Quand ces conditions sont satisfaites, on dit que les courbes coordonnées de forment un réseau de Tchebychev.111111Pafnouti Tchebychev (1821 - 1894): mathématicien russe. Montrer que dans ce cas, on peut paramétrer la surface par telle que s’écrit:
[TABLE]
où est une fonction de . Montrer que est l’angle entre les courbes coordonnées .
3. Montrer que l’expression de la courbure totale est donnée par:
[TABLE]
4. On pose :
[TABLE]
Montrer que s’écrit avec les nouvelles variables :
[TABLE]
avec . (A.N. Pressley, 2010)
Problème 4.9
Soit une surface définie dans , paramétrée par la fonction vectorielle telle que:
[TABLE]
* est dite une paramétrisation conforme de si on a les deux conditions suivantes:*
[TABLE]
1. Ecrire la première forme fondamentale de .
2. Soit Le vecteur normal unitaire.
[TABLE]
Quand le point varie sur la surface , le repère est un repère mobile. La deuxième forme fondamentale de est définie par:
[TABLE]
Si cette deuxième forme fondamentale s’écrit sous la forme :
[TABLE]
*alors, la paramétrisation de est dite isotherme. Dans ce cas, sont les rayons de courbure principaux de la surface . Une surface qui admet des coordonnées isothermes est dite isotherme. *
3. On considère que est la sphère définie par:M=\left|\begin{array}[]{l}x=Rcos\varphi cos\lambda\\ y=Rcos\varphi sin\lambda\quad R>0\\ z=Rsin\varphi\end{array}\right.
Soit la variable de Mercator. Montrer que la sphère paramétrée par est une surface isotherme.
4. On considère la base du repère mobile . Exprimer les dérivées partielles et des vecteurs de dans , en tenant compte que la surface est isotherme c’est-à-dire qu’on a l’équation:
[TABLE]
5. Montrer qu’on peut écrire les résultats de 4. sous la forme matricielle suivante:
[TABLE]
et:
[TABLE]
Les deux dernières expressions ci-dessus sont appellées les équations de Gauss-Weingarten121212Julius Weingarten (1836 - 1910) : mathématicien allemand. de la surface .
Chapter 5 Géométrie de l’Ellipse et de l’Ellipsoïde
5.1 Géométrie de l’Ellipse
5.1.1. Définitions
Définition 5.1
L’ellipse est le lieu des points dont la somme des distances à deux points fixes ou foyers est constante:
[TABLE]
où est dit le demi-grand axe de l’ellipse (Fig. 5.1).
Définition 5.2
Une ellipse est la transformée par affinité d’un cercle dans le rapport où est le demi-petit axe (Fig. 5.2).
Au point cercle ellipse avec :
[TABLE]
Soit l’angle , est dite latitude paramétrique ou réduite, d’où les coordonnées de :
[TABLE]
Par suite, les coordonnées de sur l’ellipse sont:
[TABLE]
Dans le système d’axes , l’équation de l’ellipse s’écrit:
[TABLE]
On appelle respectivement aplatissement, le carré de la première excentricité et le carré de la deuxième excentricité les quantités:
[TABLE]
5.2 Equations paramétriques de l’ellipse
Les équations (5.3) représentent les équations paramétriques de l’ellipse en fonction de la latitude . On va exprimer ces équations en fonction de l’angle de la normale en avec l’axe .
Soit la tangente en ’ au cercle de rayon , le point est l’intersection de cette tangente avec l’axe . La transformée de cette tangente par affinité de rapport de cette tangente est la droite tangente à l’ellipse au point et elle passe par (Fig. 5.3).
Dans le triangle , on a:
[TABLE]
et dans le triangle , on a:
[TABLE]
d’où:
[TABLE]
Soit:
[TABLE]
De (5.5), on exprime et en fonction de l’angle , d’où:
[TABLE]
D’où:
[TABLE]
On pose:
[TABLE]
d’où:
[TABLE]
On calcule de même :
[TABLE]
soit:
[TABLE]
On pose :
[TABLE]
avec la 2ème excentricité, d’où:
[TABLE]
Alors les équations paramétriques de l’ellipse en fonction de sont:
[TABLE]
Soit:
[TABLE]
5.2.1. Relations différentielles entre et
A partir de la relation (5.5), on obtient:
[TABLE]
et en utilisant (5.7), on a:
[TABLE]
5.3 Calcul de la grande normale
Définition 5.3
On appelle la grande normale la longueur de . est porté par la normale à l’ellipse au point . La normale a pour vecteur de direction, le vecteur l de composantes (Fig. 5.4).
D’où l’équation cartésienne de la normale:
[TABLE]
On obtient l’ordonnée de en faisant dans (5.16), d’où:
[TABLE]
Par suite, la distance est égale à:
[TABLE]
Soit:
[TABLE]
Or:
[TABLE]
On pose:
[TABLE]
est appelé la grande normale.
Les équations paramétriques de l’ellipse (5.3) deviennent:
[TABLE]
Soit:
[TABLE]
5.3.1. Arc élémentaire et rayon de courbure de l’ellipse
L’arc élémentaire se calcule à partir des équations paramétriques de l’ellipse par:
[TABLE]
En utilisant les équations (5.7) et (5.10), on obtient:
[TABLE]
Et en remplaçant en utilisant (5.15), on trouve:
[TABLE]
La longueur de l’arc de méridien comptée depuis l’équateur est:
[TABLE]
L’intégration se fait à partir d’un développement limité de (Voir plus loin). Le rayon de courbure de l’ellipse s’obtient à partir de par:
[TABLE]
5.4 Géométrie de l’Ellipsoïde de Révolution
On va étudier les propriétés de l’ellipsoïde de révolution obtenu par la rotation d’une ellipse autour du demi-petit axe comme le montre la figure ci-dessous (Fig. 5.5):
5.4.1. Les Coordonnées Géographiques
Les coordonnées géographiques définies sur l’ellipsoïde de révolution sont:
-
la longitude : angle du plan méridien du point M avec le plan méridien origine, dans notre cas, le plan origine est le plan ,
-
la latitude : angle de la direction de la normale au point M avec le plan équatorial;
-
l’altitude ellipsoïdique : si le point est sur l’ellipsoïde .
Dans le plan (Fig. 5.6) avec r et k les vecteurs unitaires des axes et , on peut écrire:
[TABLE]
D’où:
[TABLE]
Donc, les équations paramétriques du point M sont:
[TABLE]
Et en exprimant en fonction de , on a:
[TABLE]
Soit:
[TABLE]
Si , alors les coordonnées de sont:
[TABLE]
5.4.2. Passage des coordonnées tridimensionnelles aux coordonnées
Des deux premières équations de (5.22) et ne pas tenir compte du cas particulier , on obtient:
[TABLE]
De même, on pose:
[TABLE]
De (5.22), on peut écrire:
[TABLE]
soit:
[TABLE]
en posant:
[TABLE]
Le calcul de se fait par itérations: 1ère itération:
[TABLE]
2ème itération:
[TABLE]
3ème itération :
[TABLE]
En général, 3 à 4 itérations suffisent et on obtient:
[TABLE]
Par suite, on peut déterminer l’altitude géodésique :
[TABLE]
5.5 Calcul des Lignes Géodésiques de L’Ellipsoïde de Révolution
{svgraybox}
" A côté de la difficulté principale, de celle qui tient au fond même des choses, il y a une foule de difficultés secondaires qui viennent compliquer encore la tâche du chercheur. Il y aurait donc intérêt à étudier d’abord un problème où l’on rencontrerait cette difficulté principale, mais où l’on serait affranchis de toutes les difficultés secondaires. Ce problème est tout trouvé, c’est celui des lignes géodésiques d’une surface; c’est encore un problème de dynamique, de sorte que la difficulté principale subsiste; mais c’est le plus simple de tous les problèmes de dynamique. "
(H. Poincaré111Henri Poincaré (1854-1912): mathématicien français, parmi les plus grands du XIXème siècle., 1905)
Après avoir défini les lignes géodésiques d’une surface, on établit les équations des géodésiques pour une surface donnée. Comme application, on détaille celles de l’ellipsoïde de révolution. On fera l’intégration de ces équations.
5.5.1. Introduction et Notations
Soit une surface définie par les paramètres avec un domaine . Un point vérifie :
[TABLE]
On introduit les notations usuelles :
[TABLE]
[TABLE]
Des équations (5.32), on obtient les équations :
[TABLE]
Soit n le vecteur unitaire normal en à la surface , n est donné par :
[TABLE]
avec:
[TABLE]
D’où :
[TABLE]
L’équation (5.36) représente le carré infinitésimal de la longueur de l’arc.
Soit une courbe tracée sur et N est le vecteur unitaire de la normale principale le long de .
Définition 5.4
Une courbe est dite ligne géodésique de la surface si et seulement si les vecteurs n et N sont colinéaires.
On démontre par le calcul des variations (P. Petersen, 1998) que la ligne géodésique entre deux points d’une surface lorsqu’elle existe est la courbe de longueur minimale joignant les deux points.
5.5.2. Les Equations Différentielles des Lignes Géodésiques
On calcule l’expression de N, on obtient :
[TABLE]
or:
[TABLE]
d’où:
[TABLE]
La condition n // N peut être écrite:
[TABLE]
soit:
[TABLE]
Utilisant la formule du produit vectoriel:
[TABLE]
on obtient:
[TABLE]
Or et forment une base du plan tangent en M, d’où les deux conditions:
[TABLE]
Ce qui donne deux équations différentielles du second ordre:
[TABLE]
et:
[TABLE]
On pose:
[TABLE]
et on utilise les équations (5.33), (5.40) et 5.41), ces 2 dernières équations peuvent être écrites :
[TABLE]
5.5.3. Détermination des Lignes Géodésiques de l’Ellipsoïde de révolution
On considère maintenant comme surface l’ellipsoïde de révolution qu’on paramètre comme suit:
[TABLE]
où:
[TABLE]
est le rayon de courbure de la grande normale avec:
[TABLE]
On note:
[TABLE]
le rayon du parallèle de latitude et le rayon de courbure de la méridienne donné par :
[TABLE]
Alors la première forme fondamentale s’écrit :
[TABLE]
En prenant comme variables et , on obtient:
[TABLE]
Alors les équations (5.43) et (5.44) deviennent :
[TABLE]
La première équation s’écrit:
[TABLE]
dont l’intégration donne :
[TABLE]
On retrouve alors la relation de Clairaut (J. Lemenestrel, 1980):222Alexis Claude de Clairaut (1713-1765): mathématicien, astronome et géophysicien français.
[TABLE]
où est l’azimut de la géodésique au point et son azimut initial au point à l’équateur.
L’équation (5.50) s’écrit:
[TABLE]
Ce qui donne:
- le point est sur l’équateur: et le demi-grand axe de l’ellipsoïde et l’équation (5.49) devient:
[TABLE]
dont l’intégration donne:
[TABLE]
le point décrit l’équateur et la géodésique est le grand cercle de rayon .
- , le point n’est pas sur l’équateur, l’équation (5.50) s’écrit comme suit:
[TABLE]
Pour intégrer (5.57), on utilise une nouvelle fonction, soit :
[TABLE]
De (5.52), on obtient :
[TABLE]
soit:
[TABLE]
On exprime maintenant la dérivée seconde :
[TABLE]
L’équation (5.57) s’écrit en utilisant (5.52) et (5.60) :
[TABLE]
On pose:
[TABLE]
L’équation (5.61) devient:
[TABLE]
L’équation (5.63) est une équation différentielle linéaire du premier ordre avec second membre. Sa résolution sans second membre donne :
[TABLE]
En utilisant le second membre de (5.63), on considère que est une fonction de , on a alors :
[TABLE]
avec la constante d’intégration. étant une fonction positive, on doit avoir :
[TABLE]
En revenant à l’équation (5.62), on obtient :
[TABLE]
On utilise les équations (5.59) et (5.67), on obtient :
[TABLE]
ce qui donne :
[TABLE]
Pour déterminer la valeur de , on exprime en utilisant les équations (5.52) et (5.69). On écrit :
[TABLE]
soit:
[TABLE]
Or d’après (5.52) :
[TABLE]
d’où alors et par suite:
[TABLE]
Pour pouvoir intégrer l’équation précédente, on exprime , d’où :
[TABLE]
On pose:
[TABLE]
D’où:
[TABLE]
On remarque que le coefficient est supérieur à 1, donc la latitude géodésique reste inférieure à la latitude définie par .
Alors l’équation (5.71) s’écrit :
[TABLE]
D’où en remplaçant par et comme est de même signe que , on peut écrire alors :
[TABLE]
Soit en intégrant entre 0 et :
[TABLE]
[TABLE]
ou encore :
[TABLE]
En prenant comme variable , l’intégrale (5.77) devient:
[TABLE]
On cherche maintenant à exprimer l’abscisse curviligne en fonction de . Or l’expression de est égale à :
[TABLE]
soit:
[TABLE]
D’où:
[TABLE]
En prenant comme nouvelle variable, l’intégrale de (5.80) donne en prenant comme origine de l’abscisse curviligne un point de l’équateur:
[TABLE]
Les intégrales (5.78) et (5.81) sont dites des intégrales elliptiques de troisième espèce.
5.6 Applications aux Problèmes Direct et Inverse du Calcul des Lignes Géodésiques
Dans cette deuxième partie, on va traiter numériquement l’application des formules précédentes dans la résolution des problèmes dits respectivement direct et inverse du calcul des lignes géodésiques.
5.6.1. Le Problème Direct
On donne :
-
d’un point ;
-
la longueur de la géodésique de à ;
-
l’azimut géodésique de la ligne géodésique de à .
On demande de calculer :
-
les coordonnées géodésiques de ;
-
l’azimut géodésique en .
Solution:
-
Calcul de la constante , d’où et .
-
Détermination de à partir de :
[TABLE]
avec .
- Ayant , on calcule par :
[TABLE]
- Le calcul de se fait par .
5.6.2. Le Problème Inverse
On donne les coordonnées et de deux points et . On demande de calculer:
-
la longueur de la ligne géodésique de à ;
-
l’azimut en ;
-
l’azimut géodésique en .
Solution:
- On doit calculer la constante . A partir de l’équation (5.71), on peut écrire que:
[TABLE]
ce qui donne :
[TABLE]
En considérant l’azimut compris entre 0 et , donc est positif, est positif. En le calculant pour et , on obtient par la valeur moyenne:
[TABLE]
- Par suite, on obtient la valeur de par (5.73):
[TABLE]
- Ayant , on a par (5.53), et :
[TABLE]
- Par suite, on a aussi :
[TABLE]
- Enfin, l’équation (5.81) détermine .
On itère le processus.
5.6.3. Calcul de l’Expression (5.81)
Dans ce paragraphe, on calcule en détail:
[TABLE]
Pour , on a les développements limités suivants:
[TABLE]
En prenant et , on obtient:
[TABLE]
Par suite:
[TABLE]
ou encore à l’ordre 4 :
[TABLE]
avec:
[TABLE]
5.6.4. Calcul de l’expression (5.78)
On a:
[TABLE]
soit dans notre cas:
[TABLE]
Or d’après (5.83):
[TABLE]
et :
[TABLE]
et pour , on obtient:
[TABLE]
D’où:
[TABLE]
Qu’on écrit sous la forme:
[TABLE]
avec:
[TABLE]
5.6.5. Traitement d’un exemple
Le Problème direct
Soit le point avec:
-
;
-
;
-
;
-
.
Solution:
-
;
-
;
-
;
-
pour calculer , on pose , et , on a alors l’équation en utilisant (5.86):
[TABLE]
A l’ordre 1, on a: .
5.7 Exercices et Problèmes
Exercice 5.1
A partir de la définition géométrique de l’ellipse (5.1) donnée par:
[TABLE]
retrouver l’expression de l’équation cartésienne de l’ellipse.
Exercice 5.2
Montrer la formule très utilisée en géodésie:
[TABLE]
avec et les deux rayons de courbures principaux de l’ellipsoïde de révolution donnés respectivement par (5.17) et (5.20).
Problème 5.1
A partir des équations de l’ellipsoïde de révolution:
[TABLE]
1. Calculer les vecteurs:
[TABLE]
2. Calculer les coefficients:
[TABLE]
Démontrer que l’expression de la première forme fondamentale s’écrit:
[TABLE]
3. Calculer le vecteur normal n :
[TABLE]
4. Calculer les vecteurs:
[TABLE]
5. Déterminer les coefficients:
[TABLE]
6. Ecrire la deuxième forme fondamentale .
7. En appliquant la formule (4.40), Montrer que :
[TABLE]
est le rayon de courbure de la section normale au point perpendiculaire au plan de la méridienne de l’ellipsoïde de révolution.
8. En posant:
[TABLE]
En déduire que s’écrit:
[TABLE]
9. Montrer que est donnée par:
[TABLE]
Problème 5.2
Sur l’ellipsoïde, on note la latitude géodésique et la latitude réduite.
1. Calculer le rayon de courbure de l’ellipse méridienne en fonction de .
2. Exprimer l’aplatissement de l’ellipsoïde en fonction des valeurs de au pôle et à l’équateur.
3. On mesure la longueur d’un arc de méridien d’un degré à la fois au pôle et à l’équateur. On trouve respectivement et . En déduire l’aplatissement.
Problème 5.3
On donne les coordonnées tridimensionnelles suivantes d’un point :
[TABLE]
Les paramètres de l’ellipsoïde de référence sont .
1. Calculer le demi-petit axe .
2. Calculer l’aplatissement.
3. Calculer les coordonnées géodésiques du point . et seront calculées en grades avec cinq chiffres après la virgule.
Problème 5.4
Soit un ellipsoïde de révolution où sont respectivement le demi-grand axe et la première excentricité. une géodésique partant d’un point sur l’équateur et d’azimut . A cette géodésique, on lui fait correspondre une géodésique sur la sphère dite de Jacobi333Carl Gustav Jacob Jacobi (1804-1851): mathématicien allemand. de rayon , ayant le même azimut au point . De même au point de la géodésique de l’ellipsoïde, on lui fait correspondre le point de de tel qu’il y a conservation des azimuts.
1. Ecrire l’équation de Clairaut pour la géodésique .
2. On note le rayon du parallèle passant par de la géodésique . Ecrire de même l’équation de Clairaut pour la géodésique .
3. Montrer que et vérifient:
[TABLE]
et en déduire que est la latitude paramétrique de .
4. Ecrire les expressions de et respectivement sur et .
5. Montrer que:
[TABLE]
En déduire que :
[TABLE]
6. En intégrant l’équation précédente, montrer qu’on obtient:
[TABLE]
avec et est comptée à partir de .
7. En écrivant où est un infiniment petit d’ordre 4 en dont on néglige, écrire l’intégrale précédente entre et .
8. Comme est une géodésique de la sphère, on démontre que:
[TABLE]
où est l’élément différentiel de l’abscisse curviligne sur la géodésique (un grand cercle). Alors en posant au point , montrer que l’équation précédente s’écrit sous la forme:
[TABLE]
9. On suppose que la géodésique coupe une première fois le plan de l’équateur en un point , montrer qu’on obtient:
[TABLE]
10. La géodésique partant de a pour azimut , elle coupe une deuxième fois l’équateur au point , mais la géodésique sur l’ellipsoïde coupe une deuxième fois le plan de l’équateur au point correspondant à dont la longitude est . Montrer que est donnée par:
[TABLE]
Quelle conclusion a-t-on sur les lignes géodésiques de l’ellipsoïde de révolution.
Problème 5.5
Un point de la surface d’une sphère de rayon , a pour coordonnées dans un repère orthonormé:
[TABLE]
1. Montrer qu’un vecteur normal unitaire à en est:
[TABLE]
2. Soit le grand cercle passant par le point et d’azimut . Le point peut être décrit par son abscisse curviligne mesurant l’arc . On note par représente l’angle au centre de l’arc . Utilisant la trigonométrie sphérique, montrer que:
[TABLE]
3. En utilisant la formule fondamentale de la trigonométrie sphérique dans le triangle APM, montrer qu’on a les deux relations :
[TABLE]
4. En déduire que les coordonnées de s’écrivent en fonction de comme suit:
[TABLE]
5. Calculer les vecteurs et du repère de Frenêt. En déduire les composantes de en fonction de .
6. Montrer que les vecteurs et sont parallèles.
7. Justifier que les géodésiques de la sphère sont les grands cercles.
Problème 5.6
Soit le tore défini par les équations suivantes:
[TABLE]
où deux constantes positives avec , .
1. Calculer la première forme fondamentale .
2. Avec les notations usuelles, on pose:
[TABLE]
[TABLE]
Utilisant les équations des géodésiques (5.43) et (5.44) du cours, montrer que les équations des géodésiques du tore sont:
[TABLE]
[TABLE]
3. Montrer que la première équation ci-dessus donne:
[TABLE]
Montrer qu’on retrouve l’équation de Clairaut avec où est l’azimut de départ au point .
4. On suppose au point , la géodésique a pour azimut tel que:
[TABLE]
Montrer que la deuxième équation des géodésiques s’écrit en utilisant le résultat précédent:
[TABLE]
5. Montrer qu’on arrive à:
[TABLE]
où est une constante d’intégration.
Chapter 6 Les Systèmes Géodésiques
Parmi les buts de la géodésie, on trouve la définition et la mise en place des systèmes géodésiques.
A un système géodésique, on lui associe le réseau géodésique de base. On verra par la suite, l’établissement et le calcul des réseaux géodésiques.
6.1 Définition d’un système géodésique
Définition 6.1
Un système géodésique donné est un système de coordonnées où sont représentés les points géodésiques. Il est défini par:
a - son origine;
b - son orientation;
c - le type de coordonnées choisies pour localiser les points.
Le système le plus utilisé est le système cartésien formé par un repère tel que l’axe soit parallèle à l’axe de rotation de la Terre, et le plan parallèle au méridien de Greenwich origine des longitudes, l’axe est tel que le trièdre soit orthogonal et direct (Fig. 6.1). A ce système, on lui associe une base orthonormée c’est-à-dire :
[TABLE]
Pour les systèmes géodésiques classiques (terrestres), la position de l’origine est à 500 m environ du centre des masses de la Terre.
Pour les systèmes géodésiques établis par la géodésie spatiale actuelle (comme le GPS - Global Positioning System), l’origine est presque confondue avec le centre des masses de la Terre (<2 m).
L’orientation du système géodésique classique est faite à partir des observations astronomiques sur les étoiles. Ces observations vont orienter l’axe et le plan du système à être respectivement parallèle à l’axe moyen de la rotation de la Terre et au méridien de Greenwich.
Un système géodésique ou référentiel géodésique ou datum géodésique obéit à certaines conditions à savoir:
-
pas de déformation d’échelle;
-
une meilleure distribution des points;
-
la qualité homogène des coordonnées des points.
En général, les référentiels géodésiques nationaux ne remplissent pas toujours ces conditions.
Pour la mise en place d’un système géodésique, on adopte un modèle proche de la Terre. Un premier modèle est une sphère de rayon le rayon moyen de la terre. Dans ce cas, les coordoonées tridimensionnelles d’un point s’expriment par :
[TABLE]
avec respectivement:
-
la latitude;
-
la longitude comptée à partir d’un méridien origine, positive vers l’Est;
-
l’altitude au dessus de la surface.
Le deuxième modèle le plus approprié pour la Terre, après avoir fait de mesures, est l’ellipsoïde de révolution. Ainsi à chaque système géodésique est associé son ellipsoïde de révolution dit l’ellipsoïde de référence.
Un autre problème avec les systèmes géodésiques classiques est qu’il y a deux systèmes indépendants: l’un pour les coordonnées horizontales et un autre pour la composante verticale.
Les réseaux planimétriques ou horizontaux sont déterminés à partir des observations de triangulation (mesures angulaires) en général ou de trilatération (mesures des distances) réduites à l’ellipsoïde adopté.
Par contre, le système altimétrique est observé par le nivellement de précision et la référence des altitudes est déterminée à partir des observations du niveau moyen des mers à l’aide des marégraphes.
A un système donné de coordonnées planes, par exemple les coordonnées Lambert111La représentation conique conforme présentée par Johann Heinrich Lambert (1728-1777): mathématicien, physicien et astronome suisse. , ou des coordonnées tridimensionnelles géodésiques (par géodésie classique ou par les techniques spatiales), elles sont associées alors à un référentiel ou datum géodésique.
6.2 Le Géoïde
Soit le repère et une masse ponctuelle au point et soit un point de masse ponctuelle (Fig. LABEL:p11).
Alors, le point est soumis à une force F due à l’attraction de la masse au point . Le module de cette force est :
[TABLE]
où est la constante universelle de gravitation et est la distance .
6.2.1. Le Champ du Potentiel
Définition 6.2
On appelle champ du potentiel la fonction scalaire V définie par :
[TABLE]
6.2.2. Gradient
Définition 6.3
On appelle gradient d’une fonction scalaire le vecteur noté et de composantes :
[TABLE]
Exemple 1: , gradU est le vecteur de composantes :
[TABLE]
où T désigne transposé.
**Exemple 2: **
[TABLE]
comme
[TABLE]
Si on pose :
[TABLE]
alors :
[TABLE]
On calcule maintenant le gradient de la fonction scalaire donnée par l’équation (6.3) c’est-à-dire le champ du potentiel. En utilisant l’exemple 2, on a :
[TABLE]
On remarque si on pose :
[TABLE]
n est alors un vecteur unitaire porté par OM et dans la direction OM. L’expression de la force F s’écrit :
[TABLE]
[TABLE]
D’où :
[TABLE]
On dit que la force F dérive du champ de potentiel .
6.2.3. Le Laplacien222Nommé à l’honneur de Pierre Simon de Laplace (1749-1827): mathématicien français.
Définition 6.4
On appelle laplacien d’une fonction scalaire la fonction scalaire notée définie par:
[TABLE]
6.2.4. Le Champ Réel ou Champ du Potentiel de la Pesanteur
Soit le repère tel que soit le centre de gravité de la Terre et son axe de rotation. Le plan contient le méridien de Greenwich (Fig. LABEL:p2). Un point de masse unité est soumis au potentiel de gravitation et au potentiel de la force centrifuge due à la rotation de la Terre.
L’expression de est :
[TABLE]
Malheureusement, cette expression n’est pas calculable car nous ignorons la distribution des masses à l’intérieur de la Terre.
L’expression du potentiel de la force centrifuge est donnée par :
[TABLE]
où est la vitesse de la rotation de la Terre.
Définition 6.5
On appelle Potentiel du champ réel ou potentiel de la pesanteur la somme du potentiel et :
[TABLE]
Définition 6.6
On appelle vecteur de gravité le vecteur g tel que :
[TABLE]
mesure la gravité ou la pesanteur, a la dimension d’une accélération et exprimée en (Unité Système International) ou en ( en hommage à Galilée). mesure 978 à l’équateur et 983 aux pôles.
Définition 6.7
Les surfaces = constante, sur lesquelles le potentiel est constant sont appelées surfaces équipotentielles ou surfaces de niveau.
En différentiant le potentiel , on obtient :
[TABLE]
ou en notation vectorielle:
[TABLE]
Si dM est pris sur la surface équipotentielle :
[TABLE]
alors (6.21) exprime que le vecteur g est normal à la surface équipotentielle passant par le même point.
6.2.5. Le Géoïde
Une première définition du géoïde est due à C.F. Gauss (W.A. Heiskanen & H. Moritz, 1967):
” Ce que nous appelons dans le sens géométrique la surface de la terre ce n’est que la surface qui coupe les lignes de la pesanteur sous un angle droit et qui fait partie de la surface des océans”.
Le terme géoïde fut introduit pour la première fois par J. Listing333Johann Benedict Listing (1808-1882): mathématicien prussien (élève de C.F. Gauss). en 1872 (M. Bura & K. P, 1986):” nous appellerons la surface mathématique de la terre définie précédemment la surface à laquelle les océans font partie, surface géodale de la terre ou géoïde”.
La surface des liquides et des fluides se met en équilibre perpendiculairement à la verticale. Si on considérait un ensemble fluide recouvrant toute la Terre, il définissait donc une surface de niveau de la pesanteur.
La surface moyenne du niveau des mers, abstraction faite des marées et corrigée des variations, définissait une surface de niveau unique pour le monde entier. On peut définir d’autres surfaces de niveau de proche en proche à partir d’un point quelconque pris comme origine sur une verticale donnée, par la condition que cette surface soit en tout point perpendiculaire à toutes les autres verticales.
Ces surfaces de niveau successives que l’on peut numéroter sont des surfaces fermées qui s’enveloppent les unes les autres, un autre exemple ce sont les surfaces de même pression atmosphérique (isobares) sont théoriquement des surfaces de niveau.
Comme par définition, une surface de niveau est normale aux lignes de forces et que ces lignes sont des courbes gauches, les surfaces de niveau ne sont pas parallèles entr’elles, c’est-à-dire que la distance de deux surfaces de niveau n’est pas constante, ce qui reste constant c’est le travail qu’il faut accomplir contre la pesanteur pour déplacer une masse d’un point donné de ces surfaces à un point quelconque d’une autre de celles-ci.
Définition 6.8
On appelle géoïde la surface de niveau qui coïncide avec la surface moyenne des mers et qui se prolonge sous les continents par la condition d’y rester normale à toutes les lignes de forces.
On peut dans ces conditions considérer que la Terre est consituée par le géoïde, surmontée du relief dont l’altitude au dessus du niveau moyen de la mer sera par définition égale à la distance qui le sépare du géoïde. L’expérience prouve que le géoïde s’écarte très peu d’un ellipsoïde de révolution: parceque le géoïde a une expression mathématique très compliquée, alors nous utilisons en géodésie comme surface mathématique du géoïde celle de l’ellipsoïde de révolution.
Le géoïde est donc une surface physique dont la modélisation mathématique est assez compliquée.
L’un des buts de la géodésie est de déterminer la position de cette surface par rapport à la surface topographique.
Généralement, l’origine des réseaux du nivellement de précision est déterminée à partir des mesures du niveau moyen des mers enregistrées par un marégraphe. Alors, on a la relation suivante entre l’altitude du nivellement et l’altitude ellipsoïdale :
[TABLE]
où désigne la hauteur du géoïde par rapport à l’ellipsoïde de référence ou ondulation du géoïde (à ne pas confondre avec la grande normale donnée par l’équation (5.17)).
6.3 Les Systèmes de Coordonnées
A chaque système géodésique, on lui associe un système de coordonnées avec lesquelles seront exprimées les positions des points géodésiques.
6.3.1. Les Coordonnées Sphériques
Un point est défini par le triplet . Les coordonnées de s’expriment ainsi:
[TABLE]
avec:
: la distance géocentrique,
: la longitude,
: le complément à la latitude géocentrique.
6.3.2. Les Coordonnées Géodésiques
Pour le modèle ellipsoïdique de la Terre, les coordonnées d’un point s’expriment par les formules:
[TABLE]
avec:
[TABLE]
, et sont respectivement le demi-grand axe, la première excentricité de l’ellipsoïde de référence et l’altitude ellipsoïdique au point concerné.
Ces coordonnées sont dites des coordonnées géométriques.
6.3.3. Les Coordonnées Naturelles ou Géoidales ou physiques
Définition 6.9
*On appelle coordonnées naturelles, géoidales ou physiques le triplet avec sont respectivement la latitude et la longitude astronomiques. *
Ces coordonnées se rapportent à la verticale du lieu (définie par la direction donnée par un fil à plomb). La notion de la verticale est une notion fondamentale car elle correspond à une mesure physique. Elle n’est pas à confondre avec celle de la normale à l’ellipsoïde.
6.3.4. La Déviation de la verticale
Si en un point donné, on a mesuré et on a déterminé , généralement on a:
[TABLE]
On dit qu’on a une déviation de la verticale en ce point.
Définition 6.10
On définit les composantes de la déviation de la verticale par:
[TABLE]
* et sont respectivement les composantes Nord et Est de la déviation de la verticale.*
L’objet principal de la Géodésie est la détermination en chaque point de la Terre de , et .
6.4 Les Systèmes Géodésiques en Afrique du Nord
Les systèmes géodésiques terrestres de la Tunisie seront présentés au chapitre consacré à la Géodésie Tunisienne [§ 14].
6.4.1. Les Systèmes Géodésiques en Algérie
Le Système Voirol
C’était le premier système défini en Algérie (1875):
-
le point fondamental (point de départ) : Voirol (près d’Alger) créé en 1875;
-
la surface de référence : c’est-à-dire le modèle choisi pour la Terre est l’ellipsoïde de Clarke444Voir note historique ci-après. Français 1880 avec le demi-grand axe de l’ellipsoïde et la première excentricité;
-
l’orientation de départ est l’azimut astronomique de la direction Voirol-Meleb El Kora mesuré en 1874;
-
la mise à l’échelle ou la qualité métrique de réseau : la mesure d’une distance ou base à Blida en Algérie mesurée en 1854.
Le Système Europe 50
Le système était mis en place par les Américains pour le besoin de l’OTAN(Organisation du Traité de l’Atlantique Nord)en faisant une compensation générale des réseaux de l’Europe Occidentale en associant les chaînes de triangles de l’Afrique du Nord. Il est défini par les éléments suivants:
-
le point fondamental: Potsdam (Allemagne);
-
l’azimut d’orientation : l’azimut astronomique de la direction Potsdam-Golmberg;
-
l’ellipsoïde de référence : l’ellipsoïde international de Hayford:555John Fillmore Hayford (1868-1925): géodésien américain.
[TABLE]
Le Système BT56
Les éléments de définition de ce système géodésique terrestre sont:
-
le point fondamental : point Bouzaréah;
-
l’ellipsoïde de référence : l’ellipsoïde de Clarke 1880 Anglais:
[TABLE]
- l’orientation est assurée par trois gisements astronomiques traités en équations de condition.
Le Système Nord Sahara
Ce système a été défini par une transformation conforme des coordonnées du système Europe 50 de l’ellipsoïde international de Hayford sur l’ellipsoïde de Clarke 1880 Anglais.
6.4.2. Les Systèmes Géodésiques en Libye
Le Système Europe 50
Ce système était utilisé dans la fin des années 50 et le début des années 60, il était mis en place par l’AMS (Army Map Service) des Etats-Unis. Le réseau géodésique comprenait une chaîne de triangles le long de la côte de la frontière Tuniso-Libyenne à la frontière Egypto-Libyenne et rattaché au système Europe 50 précédemment défini ci-dessus.
Le Système LYB79
Ce système est défini par une compensation générale des points du système Europe 50 avec 45 points observés par la méthode Doppler666Christian Doppler (1803-1853): mathématicien et physicien autrichien.. L’ellipsoïde de référence est l’ellipsoïde international de Hayford.
6.4.3. Les Systèmes Géodésiques au Maroc
Le Système Merchich
Il a été observé en 1922 ayant les éléments suivants :
-
le point fondamental : le point Merchich (près de Casablanca au Maroc);
-
l’ellipsoïde de référence est l’ellipsoïde de Clarke 1880 Français;
-
l’azimut d’orientation : l’azimut astronomique de la direction Merchich-Berchid.
6.5 Caractéristiques des Ellipsoïdes Géodésiques
[TABLE]
Note historique: L’ellipsoïde de Clarke 1880 Français a été déterminé par le géodésien anglais Clarke A. R. 888Clarke Alexander Ross (1828-1914): géodésien anglais.
7. Feodosy Nikolaevich Krassovsky (1878 - 1948) : astronome et géodésien russe.entre les années 1878 et 1880. La méthode de détermination se repose sur des observations obtenues par les mesures d’arcs de méridiens de la Terre ainsi que les observations des latitudes géodésiques des points d’extrémités appuyés par la détermination de latitudes astronomiques.
A partir de la formule donnant la longueur d’un arc de la méridienne compris entre les latitudes géodésiques et , on écrit l’équation d’observation relative à la méthode des moindres carrés en partant d’un ellipsoïde approché de paramètres, dans la notation usuelle, soit:
[TABLE]
Clarke A.R. avait introduit le coefficient , alors s’écrit (à vérifier à titre d’exercice):
[TABLE]
Il exprimait en fonction de et et il avait utilisé 56 observations d’arcs ou portions d’arcs. Les résultats obtenus sont:
-
pour l’Angleterre: arrondi à et l’aplatissement , c’est l’ellipsoïde de Clarke 1880 Anglais. Il ne sera pas utilisé pour la cartographie de la Grande-Bretagne mais c’est plutôt l’ellipsoïde d’Airy999George Biddell Airy (1801-1892): mathématicien et astronome anglais. .
-
pour la France: , et . C’est l’ellipsoïde de Clarke 1880 Français. Il a été adopté en 1922 pour la carte de France et celles de l’Afrique du Nord. (H. Monge, 1979)
6.6 Exercices et Problèmes
Exercice 6.1
Donner l’expression des composantes du gradient en coordonnées cylindriques.
Exercice 6.2
On donne l’expression scalaire d’une fonction par :
[TABLE]
1. Calculer les composantes du vecteur dans un domaine de où .
Problème 6.1
Soit un point sur un ellipsoïde de révolution associé à un référentiel géocentrique donné . On considère le repère orthonormé local en A défini dans la base orthonormée de où est tangent au parallèle passant par et dirigé vers l’Est, tangent à la méridienne, dirigé vers le nord et porté par la normale à l’ellipsoïde dirigé vers le zénith.
1. Exprimer les vecteurs de la base dans la base de .
2. Exprimer les vecteurs et dans la base .
3. Calculer et dans la base .
4. En adoptant une écriture matricielle, montrer que :
[TABLE]
Problème 6.2
On considère les notations du précédent problème. Soit un point . On pose:
[TABLE]
où et sont respectivement les composantes du vecteur dans les repère et le repère local en .
1. Montrer qu’on a la relation: avec une matrice orthogonale qu’on déterminera.
2. On suppose maintenant que est le repère GPS et que le passage du repère vers le repère terrestre est donné par le modèle dit à 7 paramètres (§ 12):
[TABLE]
On note: , que représente . Montrer qu’au premier ordre que:
[TABLE]
3. On appelle , montrer que:
[TABLE]
où est l’angle entre les vecteurs et .
4. En déduire que:
[TABLE]
5. En utilisant la relation liant et ; montrer que:
[TABLE]
Problème 6.3
On définit dans un point par ses coordonnées ellipsoïdiques de Jacobi comme suit:
[TABLE]
avec: et , deux constantes réelles telles que .
1. Montrer que le point appartient à un ellipsoïde de révolution en précisant ses demi-axes.
2. Calculer et montrer qu’il s’écrit sous la forme:
[TABLE]
avec donnée par :
[TABLE]
3. Sachant que l’expression du laplacien d’une fonction scalaire en coordonnées de Jacobi est exprimée par:
[TABLE]
où est le déterminant de la matrice , donner l’expression de .
4. Calculer sachant que est donnée par:
[TABLE]
avec et des constantes et:
[TABLE]
Problème 6.4
Avec les notations usuelles, un potentiel est donné avec les constantes de GRS80 par :
[TABLE]
où sont les coordonnées sphériques du point de calcul et :
;
;
;
**
1. Calculer le potentiel aux points suivants situés sur l’ellipsoïde GRS80:
** le Pôle Nord;*
** sur l’equateur;*
** au point sur l’ellipsoïde avec .*
2. Calculer les variations de entre les 3 points.
3. Exprimer le potentiel en coordonnées cartésiennes .
On rappelle : .
Chapter 7 Les Réseaux Géodésiques
7.1 Introduction
L’un des buts de la Géodésie est l’établissement des réseaux géodésiques dans un territoire donné. Ces réseaux géodésiques vont constituer l’ossature des travaux cartographiques et topographiques.
Généralement, la région à cartographier est une zone vaste très étendue. Les procédés topographiques comme les polygonales ne peuvent pas être utilisés et c’est dû :
-
premièrement, la surface topographique n’est pas un plan mais plutôt un sphéroïde. Ainsi la sphéricité de la Terre est négligée dans les travaux topographiques. De plus, les corrections de la représentation plane ne sont pas prises en compte;
-
deuxièmement, vu l’étendue de la zone, les levés topographiques ne peuvent pas être faits à partir d’une seule polygonale. On est amené à faire plusieurs polygonales, celles-ci sont déterminées les unes indépendantes des autres ainsi que leurs compensations ou ajustements.
Le groupement de ces polygonales va cumuler les erreurs dès qu’on s’éloigne de la polygonale choisie polygonale de départ. Aussi, on ne peut laisser les erreurs, tolérées pour une polygonale, se cumuler et falsifier la position des points.
Le but de la géodésie est donc la détermination avec précision des coordonnées de ces points dispersés sur tout le territoire, objet de la carte.
7.2 Les Réseaux Géodésiques Classiques
7.2.1. Conception d’un Réseau Géodésique
Un réseau géodésique est généralement constitué par une chaîne de triangles où les sommets représentent les points géodésiques souvent matérialisés aux sommets des montagnes et des constructions et bâtiments élevés (châteaux d’eau, phares,…). Ce réseau de triangles couvre l’ensemble du territoire.
7.2.2. Point Fondamental
Le réseau sera déterminé de proche en proche à partir d’un premier point. Ce point est appelé Point Fondamental du réseau géodésique ou du système géodésique associé. En ce point, on détermine respectivement la latitude et la longitude astronomiques à partir d’observations sur des étoiles. La méthode la plus utilisée était celle des hauteurs égales. On observe aussi l’azimut astronomique de la direction vers un deuxième point. Cet azimut sera déterminé à partir de l’observation astronomique de l’étoile polaire. L’orientation du réseau est définie à partir de l’azimut géodésique de la direction citée précédemment. Au point fondamental, on prendra par convention:
[TABLE]
Ce choix permet de positionner le réseau par rapport à l’ellipsoïde de référence, ce qui implique qu’au point fondamental la normale à l’ellipsoïde est confondue avec la verticale.
Pour déterminer les coordonnées d’un deuxième point , il faut mesurer la distance . A partir des calculs géodésiques sur l’ellipsoïde, on peut déterminer du point connaissant du point , et .
7.2.3. Mise à l’Echelle
La mesure de la distance définit la mise à l’échelle du réseau. En général, on mesure une base de quelques kms (exemple 10 kms), par des opérations de mesures angulaires, cette base est intégrée au réseau géodésique ce qu’on appelle ’amplification de la base’.
7.2.4. Processus de Réalisation
La méthode la plus utilisée dans le processus de réalisation d’un réseau géodésique terrestre était la triangulation : soit la mesure des angles des triangles. Ces angles sont obtenus par différences de lectures entre les points et mesurés à l’aide des théodolites de haute précision comme le TH3 par la méthode des tours d’horizon. Un premier contrôle de la qualité des observations s’obtient par le calcul de la fermeture des triangles géodésiques. Soit l’excès sphérique d’un triangle en grades, on détermine , la fermeture du triangle, par :
[TABLE]
où sont les angles bruts mesurés du triangle.
En fonction des longueurs des côtés des triangles, la fermeture des triangles doit être inférieure à la tolérance requise.
7.2.5. Equation de Laplace et Contrôle de la qualité du réseau géodésique
Pour contrôler la qualité du réseau géodésique, on observe généralement tous les 200 kms un point de Laplace, soit la détermination de , et . On montre qu’en un point de coordonnées géodésiques le passage d’un azimut astronomique d’une direction observée en à l’azimut géodésique de la même direction est donné par la formule dite équation de Laplace:
[TABLE]
où est la longitude astronomique de et est la latitude géodésique ou la latitude astronomique .
A l’aide de l’équation de Laplace citée ci-dessus, on contrôle la fermeture Laplacienne par :
[TABLE]
De même, on observe aussi une base pour améliorer la qualité de l’échelle du réseau géodésique.
7.3 La Géodésie Spatiale
La géodésie spatiale a connu un essor dans la mise en place des réseaux géodésiques à partir des années 80 par l’utilisation de la méthode Doppler. Cette méthode repose sur l’effet dit Doppler sur les signaux émis par les satellites en mouvement et qui sont reçus par un récepteur centré en position sur le point géodésique. Le traitement des données enregistrées permet la détermination des coordonnées géocentriques du point géodésique ou dans un système géodésique bien défini.
La technique Doppler a été remplacée par la méthode de positionnement par les satellites GPS (Global Positioning System). Ce système permet d’observer en tout point de la Terre et en tout instant au moins quatre satellites de la constellation des satellites GPS (B. Hofmann-Wellenhof - H. Lichtenegger - J. Collins, 1992).
7.3.1. Le Système de Référence
Le système (World Geodetic System 84) est le système lié aux satellites GPS. C’est un système géocentrique , c’est-à-dire :
-
son origine est le centre des masses de la Terre;
-
l’axe est confondu avec l’axe de la rotation de la Terre défini par le BIH (Bureau International de l’Heure) à l’instant 1984.0;
-
le plan contient le méridien origine des longitudes;
-
l’axe est perpendiculaire à tel que soit un système direct.
A ce système est associé l’ellipsoïde de référence appelé ellipsoïde avec et (DMA, 1987a - 1987b - 1987c).
7.3.2. Le Système de Référence
Le système a une précision absolue de . Pour avoir une précision centimétrique, la communauté géodésique internationale représentée par l’Association Internationale de Géodésie (AIG)111AIG: l’Association Internationale de Géodésie est l’une des huit associations de l’Union Géodésique et Géophysique Internationale (UGGI) (www.iag-aig.org). a défini un système géocentrique très proche du système dont la précision est centimétrique. Ce système est appelé le système (International Terrestrial Reference Frame) associé à l’ellipsoïde défini par l’AIG avec ses paramètres et ou (H. Moritz, 2000). Comme le système , le système est géocentrique. Ce système est défini à partir de 1989 c’est pourquoi, on parle du système comme système utilisé par la communauté géodésique internationale.
7.3.3. La Détermination d’un Nouveau Réseau Géodésique
La méthode de positionnement par GPS a révolutionné la détermination des réseaux géodésiques. On décrit ci-dessous le cas de la mise en place d’un nouveau réseau géodésique dans un pays.
Observations du Réseau Géodésique GPS de Base
La technique GPS (B. Hofmann-Wellenhof - H. Lichtenegger - J. Collins, 1992) ne nécessite plus le stationnement des points sur les sommets des montagnes pour faciliter le passage des visées entre les points. On choisit alors un ensemble de points d’accès facile, formant le Réseau Géodésique GPS de Base. Après la phase de la construction de ces points, on passe à la phase des observations par l’emploi de récepteurs GPS bi-fréquences avec au moins 3 récepteurs pour avoir une base commune. La durée des observations dépendra de la distance moyenne entre les points. Supposons que cette moyenne soit de l’ordre de 120-150 kms, alors la durée des observations est au minimum 3 sessions de 8 heures (une session est une durée d’observations sans interruption). On paramètre les récepteurs de façon à enregistrer tous les les signaux émis par les satellites GPS qui se trouvent à au-dessus de l’horizon des stations.
Exemple : on a à déterminer 6 points n° 1, 2, 3, 4, 5 et 6 avec 3 récepteurs (Fig. 7.1).
Les observations seront faites comme suit :
[TABLE]
7.3.4. Calculs des points du Réseau Géodésique GPS de Base
Le système est défini par un ensemble de stations dont les coordonnées sont connues avec précision. Ces points serviront comme points fixes dans le calcul des coordonnées des points du réseau géodésique GPS de base d’un pays. En effet, les observations de ces points sont accessibles via l’Internet et on récupère les données observées dans la même période. Parmi les points les plus proches, par exemple, des pays de l’Afrique du Nord, on cite les stations Matera et Cagliari(Italie), Grasse (France) et Madrid (Espagne).
Pour calculer les coordonnées des points nouveaux, on utilise les éphémérides précises c’est-à-dire les positions précises des satellites au moment des observations. Ces éphémérides seront déterminées deux semaines après les observations par les centres de calculs de l’IGS (International GPS Service) service dépendant de l’AIG.
A la fin des calculs, on obtient les coordonnées géodésiques dans le système , ellipsoïde . A partir des formules suivantes :
[TABLE]
on obtient les coordonnées 3D . Si on dispose d’un modèle de géoïde, on détermine les altitudes orthométriques des points à partir de la relation :
[TABLE]
avec:
-
désigne ici l’ondulation du géoïde au dessus/au dessous de l’ellipsoïde ;
-
l’altitude ellipsoïdique GPS;
-
l’altitude orthométrique.
7.4 Densification du Réseau Géodésique GPS de Base
Soit le schéma suivant : la phase des observations se fait comme suit pour 4 récepteurs (Fig. 7.2):
-
un récepteur sur un point connu du Réseau GPS de Base (exemple point 1);
-
les autres récepteurs sur les points nouveaux, par exemple:
-
1ère session (2 à 3 heures) : 1 récepteur sur le point 101, un autre sur le point 102 et un autre sur le point 103;
-
2ème session : 1 récepteur sur le point 104, un autre sur le point 105 et un autre sur le point 106.
On aura le schéma suivant pour les observations :
Les observations se font en groupe de points afin d’obtenir une meilleure détermination des points lors des calculs.
La phase des calculs repose sur la fixation du point 1 dont les coordonnées sont connues et on utilise les éphémérides radiodiffusées portées par les signaux envoyés par les satellites GPS. Nous obtenons les coordonnées géodésiques des points nouveaux.
7.5 La Densification d’un Réseau Géodésique Terrestre
A l’heure actuelle, la méthode de positionnement par GPS est devenue la méthode la plus utilisée pour densifier un réseau géodésique terrestre par de nouveaux points.
La méthodologie est la suivante:
observations par GPS d’un ensemble de points anciens délimitant la zone à densifier, le nombre des points anciens est au minimum 3 points. Ces observations permettent de déterminer les paramètres de transformation entre le système GPS et le système géodésique terrestre en vigueur dans un pays; 2. 2.
observations des points nouveaux : la durée des observations dépend de l’ordre des points nouveaux. La méthode des observations des points est la même que celle décrite pour la densification d’un nouveau réseau géodésique; 3. 3.
calculs des observations GPS des points anciens et détermination des paramètres de transformation du système GPS au système géodésique terrestre officiel; 4. 4.
calculs des observations GPS des points nouveaux en fixant les coordonnées GPS des points anciens; 5. 5.
application des paramètres de transformation aux coordonnées GPS pour avoir les coordonnées géodésiques des points nouveaux dans le système géodésique terrestre en vigueur; 6. 6.
calculs des coordonnées planimétriques des points nouveaux dans la représentation plane officielle du pays.
7.6 Exercices et Problèmes
Exercice 7.1
Soit un triangle plan de côtés respectivement et (Fig. 7.3):
1. A partir de la formule:
[TABLE]
exprimer en fonction de et .
2. Donner l’expression de la variance en fonction des variances des côtés.
3. On considère maintenant que le triangle est équilatéral et on note . Montrer que :
[TABLE]
4. En déduire l’expression de la tolérance de la fermeture du triangle.
Chapter 8 Réduction des Distances
8.1 Introduction
Souvent dans les travaux géodésiques, on est amené à mesurer des distances entre des points géodésiques à l’aide des distancemètres. Pour pouvoir utiliser ces distances, il faut y apporter des corrections pour réduire ces distances au plan de la représentation plane utilisée.
8.2 Corrections des Distances
On donne une distance spatiale mesurée par un distancemètre entre deux points d’altitude et d’altitude .
Vue la présence de l’atmosphère, la distance est une distance courbe de rayon de courbure qui dépend du type de l’appareil utilisé.
Soit l’angle au centre de rayon de courbure, on a alors :
[TABLE]
De plus, on a :
[TABLE]
8.2.1. Correction de courbure
La correction de courbure est telle que :
[TABLE]
Comme est un angle très petit < 3°, on peut écrire :
[TABLE]
soit:
[TABLE]
D’où :
[TABLE]
Pour les distancemètres à ondes lumineuses, on a où désigne le rayon moyen de la Terre = 6378 . Pour les distancemètres à ondes centimétriques on a . La correction vaut en fonction de la distance mesurée :
[TABLE]
Application: , quantité négligeable.
8.2.2. Réduction à l’horizontale
Soit l’altitude moyenne de la visée , l’angle que fait avec le plan horizontal, la distance horizontale à l’altitude moyenne.
La correction à l’horizontale est donnée par telle que :
[TABLE]
Or , d’où :
[TABLE]
En posant:
[TABLE]
alors, on peut écrire que :
[TABLE]
Par suite :
[TABLE]
8.2.3. Réduction à la surface de référence ou au niveau zéro
Soit l’altitude moyenne au dessus de l’ellipsoïde. le rayon de courbure dans la direction . On a alors:
[TABLE]
La correction est telle que :
[TABLE]
Or:
[TABLE]
Par suite :
[TABLE]
Comme étant négligeable par rapport au rayon de courbure de l’ellipsoïde de référence, on obtient :
[TABLE]
Exemple Numérique : , , d’où : .
8.2.4. Correction de courbure au niveau zéro : Passage de à
Soit la distance suivant l’ellipsoïde en l’assimillant en un arc de cercle de rayon , on a :
[TABLE]
et :
[TABLE]
d’où :
[TABLE]
Comme est petit, on peut écrire que :
[TABLE]
d’où:
[TABLE]
soit:
[TABLE]
Dans (8.16), on peut remplacer par ce qui donne :
[TABLE]
Exemple numérique : .
8.2.5. Réduction de la distance au plan de la représentation plane
8.2.5.1. Le module linéaire
Définition 8.1
On appelle le module linéaire en un point donné pour une représentation plane, le rapport tel que :
[TABLE]
8.2.5.2. L’altération linéaire
Définition 8.2
On appelle l’altération linéaire en un point donné pour une représentation plane, le coefficient tel que :
[TABLE]
8.2.6. Correction de la distance au passage au plan
On a :
[TABLE]
Soit :
[TABLE]
Exemple : On donne , , alors = et .
8.3 Formule rigoureuse de passage de à
Dans le triangle (Fig. 8.1), on a :
[TABLE]
D’où :
[TABLE]
Dans le triangle , on a :
[TABLE]
et :
[TABLE]
En écrivant que les équations (8.23) et (8.25) sont égales et en posant , on obtient la formule rigoureuse :
[TABLE]
8.4 Exercices et Problèmes
Exercice 8.1
On a mesuré une distance suivant la pente entre deux points et avec , on prendra comme rayon terrestre .
1. Calculer la distance suivant l’ellipsoïde :
- en utilisant les différentes corrections;
- en utilisant la formule rigoureuse.
2. En prenant la valeur de la formule rigoureuse et sachant que le module linéaire vaut , calculer la distance réduite au plan de la représentation plane utilisée.
Exercice 8.2
Entre 2 points ( ) et ( ), la distance suivant la pente est égale à . Soit la distance corde au niveau de la surface de référence. L’angle de site observé en en direction de est .
1. Calculer la valeur de en utilisant la formule rigoureuse.
2. Calculer par les corrections.
3. En adoptant la moyenne des deux méthodes, calculer la distance réduite à la surface de référence.
4. Le module linéaire de la représentation plane utilisée est de . Calculer alors la distance réduite au plan de la représentation.
Exercice 8.3
On a mesuré une distance suivant la pente entre les points et avec .
1. Calculer la distance distance réduite à l’ellipsoïde de référence par la formule rigoureuse, on prendra le rayon de la Terre .
2. Calculer la distance réduite à la représentation plane utlisée si l’altération linéaire de la zone est de .
Chapter 9 Les Représentations Planes
9.1 Introduction
On a vu dans les chapitres précédents qu’un point géodésique est représenté par ses coordonnées géodésiques dans un système géodésique donné relatif à un ellipsoïde donné.
Les calculs géodésiques sur l’ellipsoïde étant compliqués d’une part et que l’homme a cherché toujours à visualiser le monde extérieur où il vit par des graphiques et des plans représentés sur des surfaces planes d’autre part.
Le géodésien, par le moyen des représentations planes appelées incorrectement projections, donne une représentation du modèle terrestre (sphère ou ellipsoïde) sur le plan où il est plus facile d’effectuer les calculs d’angles, de distances et de gisements.
Cependant, ces représentations subissent des déformations dues aux propriétés géométriques des surfaces modèles et images. Le problème fondamental ici est de définir des représentations minimisant ces déformations compte tenu d’un objectif déterminé.
Dans la suite du cours, on étudie les représentations dites conformes en général et plus en détail: la représentation conique Lambert et la représentation UTM (Universal Transverse Mercator).
On va établir une correspondance entre les points d’une surface modèle et les points d’une surface image , dans le cas particulier où:
-
la surface est sphérique ou ellipsoïdique;
-
la surface est plane.
9.2 Eléments correspondants
Représenter la surface sur consiste à définir une bijection B de (Fig. 9.1):
à avec:
, et
les paramètres qui définissent la surface et sont ceux de la surface .
Les points et sont appelés points correspondants. Si le point décrit une courbe sur , son image décrit une courbe , on dit que les courbes et sont dites courbes correspondantes.
De même, on appelle tangentes correspondantes, les tangentes à deux courbes correspondantes en deux points correspondants (Fig. 9.2).
L’angle de deux tangentes à deux courbes sur et l’angle des tangentes correspondantes sont dites angles correspondants (Fig. 9.3).
9.3 Canevas
Les représentations sont différenciées par deux aspects qui sont :
-
la nature des courbes coordonnées du modèle et celles de l’image qui définissent le caractère du canevas;
-
le type de l’altération: longueurs et/ou angles et/ou surfaces.
Définition 9.1
On appelle canevas les images des courbes coordonnées du modèle.
Pour passer au plan, on peut considérer le passage du modèle ellipsoïdique au plan ou celui du modèle ellipsoïdique au plan via le modèle sphérique :
[TABLE]
Les représentations peuvent être classées selon la nature des courbes coordonnées et . Pour le modèle sphérique, les courbes coordonnées déterminent toujours deux familles de courbes orthogonales, méridiens et parallèles ou pseudo-méridiens et pseudo-parallèles.
Soit le diamètre de référence du modèle, le point est le pivot de la représentation (Fig. 9.4).
La représentation est dite :
-
directe, si le diamètre de référence est choisi sur la ligne des pôles ;
-
transverse si le diamètre de référence est perpendiculaire à ;
-
oblique: les autres cas, le pivot n’est ni pôles, ni sur l’équateur.
Quant aux courbes coordonnées de l’image plane, elles sont :
-
soit deux familles de droites perpendiculaires; sont alors les coordonnées cartésiennes et du plan;
-
soit une famille de droites concourantes et la famille de cercles orthogonaux définissant des coordonnées polaires.
9.4 Les Représentations Cylindriques
Les représentations cylindriques sont définies par les représentations ayant comme courbes coordonnées images les coordonnées cartésiennes correspondantes aux courbes coordonnées du modèle.
Leurs équations sont pour les représentations cylindriques quelconques :
[TABLE]
Cas des représentations cylindriques directes : les paramètres du modèle sont respectivement la latitude et la longitude et les équations de la représentations sont de la forme :
[TABLE]
Cas des représentations cylindriques transverses : les paramètres du modèle sont les coordonnées de Cassini-Soldner et les équations sont de la forme :
[TABLE]
En remplaçant et en fonction de et de , on obtient :
[TABLE]
9.5 Les Représentations Coniques et Azimutales
Ce sont les représentations planes telles que les courbes coordonnées images sont définies par les coordonnées polaires . Les courbes Constante et constante sont les courbes correspondantes des courbes coordonnées et du modèle.
Les équations générales de ces représentations sont de la forme :
[TABLE]
cte cte les images de cte sont des droites concourantes.
cte cte les images de cte sont des arcs de cercles concentriques.
Parmi les représentations coniques, on trouve un groupe particulier de représentations où l’angle est égal à l’angle du cercle méridien correspondant soit l’azimut de la tangente au méridien au pôle de la représentation, ces représentations sont dites représentations azimutales :
[TABLE]
Les représentations coniques directes ont leurs équations comme suit :
[TABLE]
9.6 Les Altérations
9.6.1. L’Altération Angulaire
Définition 9.2
On appelle altération angulaire la différence des deux angles correspondants soit:
[TABLE]
9.6.2. Le Module Linéaire dans une direction
Soit la direction de la tangente en un point donné du modèle , et les abscisses curvilignes sur les 2 courbes correspondantes et .
Définition 9.3
On appelle module linéaire dans la direction le rapport :
[TABLE]
où V est l’image du vecteur v unitaire dans la direction .
En utilisant les éléments de la 1ère forme fondamentale des surfaces et , on a alors:
[TABLE]
soit:
[TABLE]
9.6.3. L’Altération Linéaire
Définition 9.4
On appelle altération linéaire dans la direction la quantité sans unité:
[TABLE]
9.6.4. Le Module aréolaire
Soient et des aires de domaines limités par des contours correspondants, alors:
Définition 9.5
Le module aréolaire ou rapport des aires est donné par :
[TABLE]
9.7 Indicatrice de Tissot
9.7.1. Le Lemme de Tissot 111Nicolas Auguste Tissot (1824 - 1897): cartographe français.
Lemme 9.1
En 2 points correspondants, il existe au moins deux 2 vecteurs et orthogonaux sur admettant deux vecteurs et correspondants orthogonaux sur (Fig. 9.5).
Le couple de directions correspondantes orthogonales à la fois sur la surface image et sur la surface modèle sont appelées directions principales (au sens de Tissot).
Soient et les directions principales sur . Les modules linéaires dans les directions et sont dits modules principaux:
[TABLE]
Indicatrice de Tissot: Soient un point de , dans le plan tangent à au point et le repère orthonormé de vecteurs unitaires et . Soit un point voisin de tel que . Au repère correspond le repère orthonormé sur la surface , et au point correspond le point (Fig. 9.6).
Par définition, on a :
[TABLE]
et:
[TABLE]
Par les définitions des modules linéaires et , on peut écrire:
[TABLE]
Les coordonnées du point dans sont donc:
[TABLE]
Théorème 9.1
(Indicatrice de Tissot) Quand le point varie c’est-à-dire varie, le point image de décrit une ellipse d’équation:
[TABLE]
Cette ellipse est appelée indicatrice de Tissot.
Elle est l’image du cercle de rayon unité dans le plan tangent au point de . Les longueurs des demis grands et petits axes sont les modules principaux et . La longueur d’un demi-diamètre est le module linéaire dans la direction soit .
Dans le cas général, il existe un seul couple de vecteurs orthogonaux correspondants.
Corollaire 9.1 S’il y’a une infinité de couples de vecteurs orthogonaux correspondants, l’indicatrice de Tissot est un cercle quelque soit la direction et le module linéaire est indépendant de la direction:
[TABLE]
9.7.2. Altération Angulaire
L’altération angulaire est donnée par . Or d’après les coordonnées de B données par les équations (9.13), on a :
[TABLE]
On calcule:
[TABLE]
Or:
[TABLE]
Si l’altération angulaire est nulle . D’où et l’indicatrice de Tissot est un cercle. Par suite, on a l’équivalence :
[TABLE]
La représentation est dite dans ce cas conforme.
9.8 Les Représentations Planes et les Fonctions Analytiques
9.8.1. Rappels Mathématiques
On considère le plan complexe tel que à un point de coordonnées , on associe le nombre complexe et on peut écrire:
[TABLE]
où est le module et est l’argument du nombre complexe défini à avec:
[TABLE]
9.8.1.1. Logarithme Complexe
Soit un nombre complexe donné, on cherche tous les nombres complexes tels que . Il n’en existe que si . Supposons , on a alors:
[TABLE]
On a donc:
[TABLE]
Par définition, on pose:
[TABLE]
Définition 9.6
On appelle détermination de dans un ouvert connexe du plan complexe toute fonction continue de définie dans et telle que:
[TABLE]
9.8.2. Fonction analytique
A tout nombre complexe on peut lui faire correspondre un nombre complexe par l’intermédiaire d’une fonction . On note, en appelant et les parties réelle et imaginaire de :
[TABLE]
Cette correspondance entre et définit une représentation d’un plan sur un plan dans laquelle le point d’affixe du plan ) est l’image d’un point d’affixe du plan .
L’extension des propriétés concernant les limites et la continuité, pour la fonction , se déduit immédiatement des propriétés analogues concernant les fonctions et des deux variables .
Pour étendre à la fonction la notion de dérivée, il faut étudier la limite, lorsque , du rapport , qui s’écrit :
[TABLE]
Ce rapport dépend en général de , sa limite dépend de la manière dont tend vers zéro, ou encore de la façon dont le point d’affixe tend vers le point d’affixe : si tend vers en décrivant une spirale dont est le point asymptotique, par exemple, la limite n’existe pas.
Mais le rapport est une fonction homographique de . La limite quand , est indépendante de la façon dont , c’est-à-dire dont et tendent (indépendamment) vers 0, si :
[TABLE]
C’est-à-dire si :
[TABLE]
ou en revenant à et :
[TABLE]
relations connues sous le nom de conditions de Cauchy222Augustin-Louis Cauchy (1789-1857): mathématicien français.. Lorsque ces conditions sont satisfaites, la fonction admet, en tout point de son domaine de définition, une dérivée notée :
[TABLE]
La fonction est dite analytique.
9.8.2.1. Autre définition de la fonction analytique
Soit une fonction complexe donc une application de . On suppose que soit différentiable entraîne que:
[TABLE]
On pose:
[TABLE]
qui sont 2 fonctions différentiables en x et y, d’où:
[TABLE]
Par suite:
[TABLE]
On les remplace dans l’équation (9.27), on obtient:
[TABLE]
En remplaçant par et par , devient une fonction , ce qui donne en posant:
[TABLE]
On considère maintenant le cas où la fonction est analytique. De l’équation précédente, on a:
[TABLE]
C’est-à-dire:
[TABLE]
On vérifie bien si ce terme là est nul:
[TABLE]
On introduit la notation suivante:
[TABLE]
On a donc de (9.32):
[TABLE]
Comme la fonction ou est analytique, et en utilisant les conditions de Cauchy (9.24), on a finalement:
[TABLE]
Définition 9.7
Une fonction est analytique en si elle ne dépend que de soit:
[TABLE]
Avec les notations de l’équation (9.22), au point du plan , quelle que soit la direction du vecteur , d’affixe , on peut écrire :
[TABLE]
relation qui exprime que le vecteur se déduit du vecteur par une similitude, dont le rapport est et l’angle .
La représentation du plan sur le plan est donc conforme. On peut écrire :
[TABLE]
Le module linéaire de la représentation est :
[TABLE]
angle de la tangente en à l’image de la droite du plan (Fig. 9.8). En effet, cette image est définie en fonction du paramètre , par :
[TABLE]
Les conditions de Cauchy données par (9.25) se traduisent aussi en disant que les fonctions et sont des fonctions harmoniques, c’est-à-dire qu’elles satisfont chacune l’équation de Laplace :
[TABLE]
On démontre les propriétés suivantes (J. Dieudonné333Jean Dieudonné (1906 - 1992): mathématicien français., 1970):
-
si est une fonction analytique, elle admet des dérivées de tous les ordres : elle est donc développable en série entière en tout point de son domaine de définition;
-
une fonction analytique est déterminée dans tout son domaine d’existence, si elle est définie dans une région, aussi petite qu’on la suppose, entourant un point ; ou même tout le long d’un arc de courbe, aussi petit qu’on le suppose, aboutissant au point .
En effet, la connaissance de au voisinage de permet (théoriquement tout au moins) de former la suite des dérivées de au point , donc, d’écrire son développement en série de Taylor. Si est un point intérieur au cercle de convergence de cette série, on peut alors calculer les dérivées successives de au point , et ainsi de suite. L’opération est dite prolongement analytique de .
9.8.3. Représentation Conforme d’une Surface sur une autre
{svgraybox}
Conformal mappings play also a fundamental role in modern physics, namely, in string theory and conformal quantum field theory.
(E. Zeidler444E. Zeidler (1905 - 2016): éminent physicien allemand., 2011)
La représentation d’une surface modèle sur une surface image est définie en établissant une correspondance entre les coordonnées curvilignes de et de :
[TABLE]
Le module linéaire est alors :
[TABLE]
En remplaçant et en fonction de et en utilisant (9.39) et (9.40), on peut écrire sous la forme:
[TABLE]
Soient le plan tangent à au point , et deux courbes et passant par dont les tangentes respectivement à et appartiennent au plan tangent. est une base du plan tangent.
Soit la direction de la tangente à de direction:
[TABLE]
De même, soit la direction de la tangente à de direction:
[TABLE]
La forme fondamentale de est :
[TABLE]
En notant l’angle des deux tangentes en , on a la relation:
[TABLE]
En posant:
[TABLE]
et:
[TABLE]
Ce qui donne:
[TABLE]
On pose:
[TABLE]
D’où:
[TABLE]
ou encore:
[TABLE]
En utilisant les notations et , on a:
[TABLE]
On obtient finalement:
[TABLE]
Sur la surface image , l’expression de donnée par l’équation (9.41):
[TABLE]
Soit l’angle des tangentes correspondantes à et , on a a aussi:
[TABLE]
Il y’a conservation des angles si on a:
[TABLE]
En particulier si :
[TABLE]
c’est-à-dire, on prend l’angle d’une tangente avec la courbe coordonnée et cela suffit. Alors l’équation devient :
[TABLE]
Elevant au carré, les deux membres de l’équation précédente s’écrivent:
[TABLE]
En éliminant le 1 et simplifiant par , on obtient:
[TABLE]
Si:
[TABLE]
On a donc:
[TABLE]
Maintenant on suppose que :
[TABLE]
On doit avoir le rapport :
[TABLE]
égal à .
Pour cela, il faudra donc :
[TABLE]
Ce qui donne (avec ) :
[TABLE]
Soit:
[TABLE]
Comme , on a:
[TABLE]
La condition (9.46) est vérifiée si et seulement si :
[TABLE]
- Si les coordonnées sont orthogonales , les deux conditions précédentes à gauche deviennent :
[TABLE]
- Si les coordonnées sont symétriques, alors , les conditions de conformité s’écrivent :
[TABLE]
Or :
[TABLE]
De la première relation de (9.50), on tire en supposant :
[TABLE]
D’où :
[TABLE]
Soit :
[TABLE]
L’équation (9.51) donne:
[TABLE]
Les équations (9.52), (9.53) sont, pour les fonctions et , les conditions de Cauchy.
La correspondance entre le plan des et celui des est une représentation conforme (G. Julia, 1955) et on peut poser :
[TABLE]
Toute fonction analytique définit une représentation conforme de sur .
et étant des coordonnées symétriques, les éléments linéaires et s’écrivent :
[TABLE]
et:
[TABLE]
Alors le module linéaire est donné par :
[TABLE]
L’argument de s’interprète d’une manière analogue à ce qui se passe dans la représentation d’un plan sur un plan.
Si en particulier, la surface image est un plan :
[TABLE]
et:
[TABLE]
Si la surface modèle est un modèle de la terre, on a :
[TABLE]
-
pour un ellipsoïde : et est la latitude isométrique;
-
pour une sphère : et est la latitude croissante ou latitude de Mercator.
Pour une représentation plane conforme, le modèle linéaire est :
[TABLE]
avec et ou et . Dans ce dernier cas, on a :
[TABLE]
Donc :
[TABLE]
qui n’est autre que le gisement de l’image du méridien (J. Commiot, 1980).
9.9 Les Représentations ou Transformations Quasi-Conformes
Dans les paragraphes précédents, on a étudié les représentations de la sphère avec les variables ou celles de l’ellipsoïde de révolution avec les coordonnées vers le plan avec:
[TABLE]
en notant:
[TABLE]
En posant:
[TABLE]
on a considéré les représentations conformes (c’est-à-dire qui conservent les angles) ou encore définies par :
[TABLE]
avec une fonction dite holomorphe de soit:
[TABLE]
où est le conjugué de soit (ou ).
Définition 9.8
Une fonction définie et dérivable sur un domaine (l’ensemble des nombres complexes) est dite quasi-conforme si elle vérifie (L. Bers, 1977):
[TABLE]
Le coefficient s’appelle coefficient de Beltrami555Eugeno Beltrami (1835-1899): mathématicien italien..
9.9.1. Développement d’une fonction en un point
Soit une fonction quasi-conforme et un point . En écrivant un développement de au point , on a alors:
[TABLE]
Par un changement de variables, on peut prendre , d’où:
[TABLE]
Utilisant (9.69), l’équation précédente s’écrit en négligeant les termes du deuxième degré:
[TABLE]
Donc s’écrit localement:
[TABLE]
9.9.2. Etude de la Transformée d’un cercle
On sait que pour une transformation conforme, l’image d’un cercle autour d’un point est un cercle (ou encore l’indicatrice de Tissot est un cercle). Soit un point qu’on peut prendre égal à 0. Par un changement de l’origine des axes, la fonction s’écrit:
[TABLE]
Par abus, on garde la même notation. On considère autour de l’origine un point qui décrit un cercle infiniment petit de rayon . On étudie ci-après l’image du point par .
De l’équation précédente, on a:
[TABLE]
Si , on a et :
[TABLE]
Maintenant on prend , alors et on obtient:
[TABLE]
en tenant compte que .
Des équations (9.72),(9.73) et (9.74), on déduit que l’image de décrit une ellipse de demi-grand axe et demi- petit axe respectivement (Fig. 9.9) :
[TABLE]
On appelle:
[TABLE]
coefficient de distortion ou de dilatation.
9.9.3. Calcul d’un élément de longueur sur le Plan
Un élément de longueur sur le plan est donné par:
[TABLE]
Comme et , on a alors:
[TABLE]
On pose:
[TABLE]
Le carré du module linéaire de la transformation quasi-conforme s’écrit:
[TABLE]
Dans l’équation (9.77), on considère varie le long d’un cercle de rayon infiniment petit et on fait tendre . Alors, on obtient :
[TABLE]
L’équation (9.77) devient:
[TABLE]
Comme:
[TABLE]
on obtient:
[TABLE]
or , par suite l’équation (9.78) s’écrit:
[TABLE]
Remplaçant par , (9.79) devient:
[TABLE]
9.9.4. Exemple de Transformation Quasi-conforme
Lors de passage de coordonnées planes d’un système géodésique à des coordonnées planes dans un autre système géodésique , on utilise souvent une transformation du type:
[TABLE]
ou encore sous forme matricielle :
[TABLE]
En posant et , on obtient:
[TABLE]
On note par :
[TABLE]
Comme et , alors l’équation (9.83) s’écrit:
[TABLE]
On pose :
[TABLE]
Alors (9.84) s’écrit:
[TABLE]
Pour quelles valeurs de la transformation (9.82) est quasi-conforme? En comparant (9.84) avec (9.70), il faut que soit:
[TABLE]
C’est-à-dire que le déterminant de la matrice (9.82) soit strictement positif.
Note historique: La représentation stéréographique de la sphère au plan est l’une des représentations la plus utilisée depuis l’antiquité (voir exercices n°1 et n°5 ci-dessous). Elle était connue par l’astronome et mathématicien Hipparque (190-120 avant J.C) ainsi que Claude Ptolémée (80-168). Ce dernier connaît que la représentation stréographique transforme les cercles en cercles ou en droites, mais on ignore s’il savait que l’image de tout cercle de la sphère est un cercle ou une droite. Cette propriété fut démontrée par l’astronome et ingénieur arabe Abul Abbas Al-Farghani (805-880), qui vivait entre le Caire et Baghadad au milieu du 9ème siècle. Cette représentation était employée dans la confection des astrolabes.
C’était Thomas Harriot (1560-1621) mathématicien et astronome anglais qui avait montré que la représentation stéréographique était conforme et approuvée par un papier présenté par l’astronome Edmond Halley (1656-1742) à la Société Royale de Londres.
Le terme "projection stéréographique " fut donné par le mathématicien belge et d’origine espagnole François d’Aiguillon (1567-1617) en 1613 dans le sixième chapitre concernant les projections de son livre d’optique "Opticorum liber extus de proiectionibus".
Rappelons que l’histoire des représentations conformes était le point de départ de la géométrie différentielle moderne avec le papier de Carl Friedrich Gauss de 1827 sur la théorie générale des surfaces. Un autre apport considérable était venu du travail du mathématicien français Gaspard Monge (1746-1818) spécialement son livre sur l’application de l’analyse à la géométrie. (H.A. Kastrup, 2008)
9.10 Exercices et Problèmes
Problème 9.1
Soit la sphère de rayon , au point on lui fait correspondre le point du plan par la représentation plane suivante définie par les formules :
[TABLE]
1. Montrer que l’image d’un méridien ( = constante ) est une droite dont on donne l’équation.
2. Montrer que l’image d’un parallèle ( = constante ) est un cercle dont on précise l’équation.
3. En utilisant le lemme de Tissot, déterminer les directions principales.
4. Soit la longueur infinitésimale correspondante sur le plan, calculer .
5. Sachant que sur la sphère , calculer le module linéaire .
6. En déduire le module linéaire le long du méridien.
7. En déduire le module linéaire le long d’un parallèle.
8. Comparer et . Conclure sur la conformité ou la non conformité de la représentation plane.
Problème 9.2
Soit la sphère de rayon , au point on lui fait correspondre le point du plan par la représentation plane suivante définie par les formules :
[TABLE]
où désigne le logarithme népérien.
1. Quelles sont les images des méridiens ( = constante) et des parallèles ( = constante).
2. Soit la longueur infinitésimale correspondante sur le plan, calculer en fonction de et de et calculer le module linéaire .
3. En déduire les modules linéaires le long du méridien et le long du parallèle.
4. Comparer et et conclure sur la conformité ou la non conformité de la représentation plane.
5. On suppose que décrit sur la surface une courbe telle que et sont liées par la relation : . Pour et , dresser un tableau donnant les valeurs de correspondantes.
6. Sachant que , calculer les coordonnées de la représentation plane donnée ci-dessus pour les valeurs de et de la question 5.
7. Rapporter à l’échelle 1/100 sur le plan , les positions des points. Que pensez-vous de l’image de la courbe .
Problème 9.3
Sur une sphère de rayon unité, modèle de la terre, on désigne :
- par le pôle nord;
- par un grand cercle qui coupe l’équateur au point de longitude nulle;
- par le pôle de ce grand cercle, de latitude positive,
- par et respectivement les points d’intersection de et du méridien de et du grand cercle issu de , passant par le point .
On pose : .
1. est le pivot d’une représentation cylindrique conforme oblique tangente, dont est le ”pseudo-équateur”. Le plan est rapporté aux axes images respectives de et du grand cercle . Exprimer en fonction de et les coordonnées du point image de a (vérifier que pour , on retrouve les expressions de d’une représentation transverse).
2. Montrer que l’équation de l’image plane du parallèle de latitude peut s’écrire :
[TABLE]
Indications : désignant un point de latitude , le triangle est isocèle, décomposer ce triangle en deux triangles rectangles égaux. Etudier qualitativement les images des autres parallèles.
3. Montrer que l’image plan de l’équateur a pour équation :
[TABLE]
Ecrire d’une manière analogue, l’équation de l’image du méridien .
4. Exprimer le gisement du méridien en fonction de et . Déterminer la valeur du module linéaire, en particulier en , en un point de l’équateur, et en un point du méridien origine.
Problème 9.4
Etude de la représentation conforme d’une sphère de rayon unité dite représentation de Littrow666En hommage à Joseph Johann Littrow (1781-1840) astronome autrichien. définie par :
[TABLE]
avec , la latitude de Mercator et .
1. Préciser le canevas, les images des méridiens et celle de l’équateur.
2. Vérifier que les points et sont des points singuliers.
3. Etudier les images plans des cercles de diamètre et des petits cercles orthogonaux.
4. Soit le point . On appelle segment capable sphérique l’ensemble des points tels que l’angle . Quelle est l’image plane de cette courbe dans cette représentation plane.
Problème 9.5
Soit l’application définie par:
[TABLE]
1. Calculer la forme fondamentale .
2. Montrer que appartient à la sphère d’équation .
3. Calculer en fonction de et .
4. Soit le point de , calculer les coordonnées du point intersection de la droite avec la plan en fonction de et .
5. Soit l’application . Montrer que . En déduire que .
6. Trouver le rapport de ce problème avec le problème 9.1.
Problème 9.6
Soit un ellipsoïde de révolution avec et respectivement le demi-grand axe de l’ellipsoïde de révolution et la première excentricité. Soit une sphère de rayon . On veut étudier le passage suivant:
[TABLE]
1. Exprimer le module linéaire de cette représentation.
2. On pose:
[TABLE]
* est la latitude isométrique de l’ellipsoïde de révolution et la latitude de Mercator. Une transformation conforme entre et est donnée par où est une fonction analytique. On propose le cas le plus simple à savoir:*
[TABLE]
les sont des constantes réelles. Donner les expressions de et en fonction de et .
3. On veut que repésentation transforme les méridiens et les parallèles de l’ellipsoïde respectivement en méridiens et parallèles de la sphère et que l’image du méridien origine soit le méridien origine de la sphère . Montrer que et .
4. Pour avoir la même orientation en longitude, on prendra . On cherchera la transformation à déformation minimale autour d’un parallèle tel que le parallèle est automécoïque et le module linéaire est stationnaire pour , c’est-à-dire et \displaystyle\left(\frac{dm}{d\varphi}\right)\biggr{|}_{\varphi=\varphi_{0}}=0, en plus on considère aussi la condition:
[TABLE]
Pour faciliter les notations, on prendra . Montrer que la relation liant et est:
[TABLE]
5. Déterminer les constantes et en fonction de et telles que les conditions ci-dessus soient vérifiées.
6. Montrer que l’expression du développement limité de de part et d’autre du parallèle est donnée par:
[TABLE]
7. On fait intervenir la deuxième excentricite , Montrer que s’écrit:
[TABLE]
Problème 9.7
Soit un ellipsoïde de référence de paramètres et respectivement le demi-grand axe et la première excentricité. On considère une représentation plane de vers le plan . On pose:
[TABLE]
avec la latitude isométrique.
1. Ecrire les expressions du carré des éléments infinitésimaux de longueur sur l’ellipsoïde et le plan. En déduire le module linéaire .
2. On pose . Si est le gisement de l’image du méridien passant par le point , montrer que .
3. On cherche une représentation plane du type où et des constantes complexes. On impose les conditions suivantes:
- pour , ;
- l’axe des coïncide avec le méridien à l’origine.
Montrer que .
4. En déduire que s’écrit: avec des réels.
Problème 9.8
L’objet de ce problème est l’étude de la comparaison de deux réseaux géodésique par l’effet d’une translation tridimensionnelle. On commence par l’étude d’un modèle sphérique, puis celui d’un modèle ellipsoïdique. Le point de départ est deux calculs et d’un réseau géodésique qu’on considère au voisinge de l’equateur.
I. On considère que les coordonnées de et sont exprimées par la représentation plane Mercator directe d’un modèle sphérique (de rayon ). Un point a pour coordonnées:
[TABLE]
1. Exprimer les coordonnées géodésiques en fonction des coordonnées tridimensionnelles .
2. Une translation tridimensionnelle infinitésimale est exprimée par des formules ci-dessus. Montrer que et en fonction de et donnent:
[TABLE]
Or l’équation ci-dessus n’est autre que la différentielle de la latitude de Mercator , d’où:
[TABLE]
3. On se place au voisinage du point central de l’équateur, on peut écrire au deuxième ordre de petitesse:
[TABLE]
A partir de la formule de montrer qu’on peut écrire .
4. Montrer qu’on peut écrire alors:
[TABLE]
5. En gardant les termes du 2ème ordre, simplifier l’expression de .
6. On pose: et . Montrer alors la formule de Dufour-Fezzani (H.M. Dufour, 1979):
[TABLE]
7. La transformation est-elle conforme.
II. On considère que les coordonnées de et sont exprimées par la représentation UTM d’un modèle ellipsoïdique , et sont respectivement le demi-grand axe et la première excentricité. Un point du modèle ellipsoïdique a pour coordonnées:
[TABLE]
avec : . Les coordonnées géodésiques sont exprimées par:
[TABLE]
8. On considère une translation tridimensionnelle infinitésimale . On note par la latitude isométrique:
[TABLE]
On opère de la même manière qu’en I., montrer qu’au deuxième ordre de petitesse, on a:
[TABLE]
9. On pose: . Montrer alors, la formule de Dufour-Ben Hadj Salem (A. Ben Hadj Salem, 2012):
[TABLE]
10. La transformation est-elle conforme.
Problème 9.9
Pour une représentation plane, on dit qu’elle est équivalente si le produit des modules linéaires et suivant les directions principales vérifient:
[TABLE]
Soit le modèle terrestre représenté par la sphère de rayon qu’on note . Au point on lui fait correspondre le point du plan par la représentation plane suivante définie par les formules :
[TABLE]
1. Qu’elle est l’image du pôle nord ?
2. Montrer que l’image d’un méridien ( = =constante ) est une droite qu’on donne l’équation.
3. Montrer que l’image d’un parallèle ( = =constante ) est un cercle qu’ on précise l’équation.
4. En utilisant le lemme de Tissot, déterminer les directions principales.
5. Soit la longueur infinitésimale correspondante sur la sphère, donner l’expression de .
6. Soit la longueur infinitésimale correspondante sur le plan. Montrer que:
[TABLE]
7. En déduire le carré du module linéaire .
8. Calculer le module linéaire le long du parallèle.
9. Calculer le module linéaire le long du méridien.
10. La représentation plane définie par (9.90) est-elle équivalente. Justifier votre réponse.
Chapter 10 La Représentation Plane Lambert
10.1 Définition et Propriétés
La représentation plane Lambert est une représentation conique, conforme et directe d’un modèle ellipsoïdique :
-
conique : on utilise les coordonnées polaires et ;
-
conforme : conservation des angles ou l’altération angulaire est nulle;
-
directe : les coordonnées polaires sont des fonctions de la forme :
[TABLE]
où sont les coordonnées d’un point sur le modèle ellipsoïdique de référence.
Pour la Tunisie, on a considère le cas de la représentation tangente c’est-à-dire on utilise un seul parallèle origine. Dans la suite du cours, on va étudier en détail le cas d’un seul parallèle origine.
Une interprétation de la représentation plane Lambert est comme suit:
-
on considère un cône (Fig. 10.1) de sommet S tangent au parallèle origine de latitude de l’ellipsoïde de référence . A un point M de , on lui fait correspondre son image m sur la demi-droite d’origine S tangente à la méridienne de longitude et au parallèle origine.
-
on développe le cône sur le plan, on obtient l’image d’une portion de l’ellipsoïde (Fig. 10.2).
Les images des parallèles sont des arcs de cercles concentriques de centre s l’image du sommet du cône , celles des méridiens sont des droites concordantes passant par s (Fig. 10.2).
Les courbes coordonnées = constante et constante sur le modèle sont orthogonales et leurs images le sont aussi dans le plan.
10.2 Indicatrice de Tissot
D’après la propriété précédente des courbes coordonnées, on déduit que les directions principales sont les tangentes au méridien et au parallèle passant par le point.
La représentation est conforme, par suite l’altération angulaire est nulle, l’indicatrice de Tissot est un cercle et le module linéaire ne dépend pas de la direction mais seulement du point et on a l’équivalence:
[TABLE]
où désigne ’la direction’.
10.3 Calcul des modules principaux
On commence par le calcul du module . Par définition :
[TABLE]
avec pris sur l’image de la méridienne et sur la méridienne du modèle, or et , le signe - provient du fait que les déplacements infinitésimaux et sont de signe contraire. On note par le rayon de courbure, d’où :
[TABLE]
Maintenant on calcule le module principal , on a :
[TABLE]
avec le rayon du parallèle de latitude .
10.4 Etablissement des Formules et
Comme on a :
[TABLE]
d’où :
[TABLE]
Le terme à gauche est une fonction de seulement car ne dépend que de , le terme à droite est fonction de seulement, donc l’égalité est toujours vérifiée que si les deux termes sont constants, on appelle cette constante, d’où :
[TABLE]
Par suite, en intégrant la première équation et prenant avec la longitude du méridien origine, on obtient:
[TABLE]
La deuxième équation différentielle s’écrit sous la forme:
[TABLE]
avec :
[TABLE]
La variable appelée la latitude isométrique donnée par la formule:
[TABLE]
En effet, calculant une primitive de en considérant n’atteint pas les valeurs extrêmes , soit:
[TABLE]
où on a fait le changement de variables suivant avec . Par suite en prenant l’intégrale entre la latitude origine et la latitude et que , on retrouve la formule donnée par (10.4) où est la première excentricité de l’ellipsoïde de référence.
On revient à l’équation (10.2):
[TABLE]
En posant:
[TABLE]
où est la latitude du parallèle origine, l’intégration de (10.2) donne:
[TABLE]
10.5 Détermination des Constantes et
Pour déterminer les constantes et , on impose que le parallèle origine soit un isomètre automécoïque et stationnaire, c’est-à-dire :
[TABLE]
soit le module linéaire admet un minimum égal à . Comme:
[TABLE]
et:
[TABLE]
D’où l’expression du module linéaire:
[TABLE]
Pour , on a:
[TABLE]
on appelle :
[TABLE]
Le calcul de donne :
[TABLE]
comme:
[TABLE]
on obtient :
[TABLE]
On a alors:
[TABLE]
[TABLE]
Or:
[TABLE]
Par suite:
[TABLE]
On revient à l’équation (10.7) : et en prenant sa différentielle logarithmique, d’où le résultat:
[TABLE]
En utilisant les équations (10.6) et (10.7), on obtient :
[TABLE]
Soit:
[TABLE]
Et pour , on a:
[TABLE]
D’où:
[TABLE]
L’équation (10.8) s’écrit donc:
[TABLE]
d’où les équations de la représentation plane Lambert :
[TABLE]
avec:
[TABLE]
L’expression du module linéaire est égale à:
[TABLE]
10.6 Expression des Coordonnées Cartésiennes
Dans ce paragraphe, on va décrire les coordonnées cartésiennes en fonction de . Soit un point ayant pour coordonnées polaires .
On considère un système d’axes qu’on nomme repère origine, tel que l’axe est la tangente à l’image du parallèle origine au point dirigé vers l’Est et est porté par l’image du méridien origine dirigé vers le Nord (Fig. 10.3). Soit le point de avec , on a alors:
[TABLE]
ou encore :
[TABLE]
avec comptée positivement à l’Est du méridien origine des longitudes.
10.7 Passage des Coordonnées aux Coordonnées
Ayant et , on calcule :
[TABLE]
10.8 Passage des Coordonnées aux Coordonnées
On donne et et ayant , on calcule :
[TABLE]
Comme :
[TABLE]
d’où :
[TABLE]
Par suite :
[TABLE]
D’où :
[TABLE]
De:
[TABLE]
on obtient :
[TABLE]
Et de:
[TABLE]
d’où:
[TABLE]
Le problème devient à calculer à partir de la donnée de la latitude isométrique . Ce calcul se fait par itérations comme suit:
Ayant , on calcule telle que . 2. 2.
On calcule telle que . 3. 3.
On réitère le processus jusqu’à ce que où une petite quantité fixée à l’avance.
10.9 Etude de l’Altération Linéaire
L’altération linéaire est définie par:
[TABLE]
où est le module linéaire. Le développement limité du module linéaire au voisinage de s’écrit:
[TABLE]
Or :
[TABLE]
car le parallèle est un isomètre automécoïque et stationnaire, d’où:
[TABLE]
On est amené à calculer la valeur de la dérivée seconde de pour . Or l’équation (10.11) donne l’expression de . On dérive .
[TABLE]
d’où:
[TABLE]
car et . (10.20) devient:
[TABLE]
En posant :
[TABLE]
on a alors:
[TABLE]
Or la distance approchée du point au parallèle origine , d’où l’expression de l’altération linéaire:
[TABLE]
où est la distance du point au parallèle origine.
10.9.1. Calculs numériques
On considère comme exemple numérique le cas de la représentation Lambert Nord Tunisie ayant comme parallèle origine et l’ellipsoïde de référence est celui de Clarke Français 1880.
On a donc les valeurs numériques du module et l’altération linéaires comme suit:
[TABLE]
Soit une distance de sur le parallèle origine, elle se transforme à sans altération. Une distance de sur le parallèle devient une distance de sur le plan, de même une distance de sur le parallèle devient une distance de sur le plan.
Pour réduire les altérations linéaires, on multiplie le module linéaire par un coefficient dit facteur de réduction de l’échelle. Le module linéaire devient alors:
[TABLE]
Par suite, les modules linéaires et les altérations correspondantes deviennent (Cas de la Tunisie, le facteur est égal à ):
[TABLE]
Sur le parallèle , l’altération linéaire pour a passé de à , d’où réduction des altérations.
Avec l’introduction du facteur de réduction de l’échelle, les formules (10.16) des coordonnées rectangulaires s’écrivent:
[TABLE]
Pour obtenir des coordonnées rectangulaires positives, on définit un repère tels que et soient dirigés respectivement vers l’Est et le Nord (Fig. 10.4) et que:
[TABLE]
Les quantités Constante et Constante sont respectivement les constantes de translation en et en exprimées en mètres.
10.10 Convergence des méridiens
Pour passer de l’azimut géodésique sur le modèle ellipsoïdique de la direction au gisement sur le plan de la représentation, on a la formule algébrique:
[TABLE]
avec le gisement de l’image du méridien avec son signe positif ou négatif. Or l’image d’un méridien est une droite qui coupe l’axe Ox (du nord) sous l’angle , par suite:
[TABLE]
10.11 Calcul de la réduction de la corde
Sur le terrain, on observe une direction , la visée est très voisine de la géodésique . Sa transformée sur le plan de la représentation n’est pas une droite, mais une courbe tournant sa concavité vers l’image du parallèle origine.
On observe la direction c’est-à-dire l’arc . Pour passer de l’arc à la cordre , on apporte une correction à la lecture de la direction ou . Cette correction est appelée la correction de réduction à la corde. Elle est donnée par la formule:
[TABLE]
où représente la longueur , est la courbure de la transformée de la géodésique prise au 1/3 de la distance de vers .
En utilisant la formule de Schols-Laborde111Jean Laborde: colonnel de l’armée française et géodésien cartographe. Il a défini la représentation plane qui porte son nom (représentation conforme cylindrique oblique). Celle-ci a été appliquée pour le Madagascar. donnant la courbure de la transformée d’une géodésique, on démontre que:
[TABLE]
avec la différence de longitude en des 2 extrémités de la visée et vaut:
[TABLE]
où , et en .
10.12 Exercices et Problèmes
Exercice 10.1
En un point de coordonnées géodésiques et à l’Est de Greenwich, on vise un point .
1. Calculer les coordonnées planes Lambert du point A, sachant que et .
2. L’azimut géodésique de la direction est . Sachant que , calculer le gisement de la direction .
3. La distance réduite à l’ellipsoïde de référence est . Sachant que l’altération linéaire dans la région des points et vaut , calculer la distance réduite au plan.
Exercice 10.2
D’après les coordonnées de deux points et vous trouvez la distance . Sachant que :
a - l’altération linéaire de la représentation dans la région de vaut ;
b - les altitudes des points et sont : et . Calculer la distance suivant la pente entre les points et matérialisés sur le terrain.
Problème 10.1
On désire étudier les variations du module linéaire de la représentation Lambert tangente en fonction de la latitude .
1. Donner l’expression de .
2. Montrer que est une quantité finie positive que l’on calculera.
3. Montrer que pour , devient une forme indéterminée qu’on précisera.
4. On pose et . Donner l’expression de .
5. Montrer qu’on peut écrire où est une fonction de prenant une valeur finie positive non nulle quand et donnée par:
[TABLE]
avec la latitude du parallèle origine.
6. On pose . Montrer que s’écrit:
[TABLE]
et que .
7. En déduire la limite de quand .
8. Donner l’expression de et présenter le tableau de variation de pour le cas où .
Problème 10.2
On a mesuré une distance suivant la pente entre deux points et avec , on prendra comme rayon terrestre .
1. Calculer la distance suivant l’ellipsoïde en utilisant la formule rigoureuse.
2. Sachant que le module linéaire vaut , calculer la distance réduite au plan de la représentation plane utilisée.
3. Les coordonnées géodésiques du point sont : . Par des observations astronomiques, on a déterminé les coordonnées astronomiques et du point et l’azimut astronomique de la direction soit . Transformer l’azimut astronomique de la direction en azimut géodésique en utilisant l’équation de Laplace donnée par :
[TABLE]
4. Calculer le gisement de la direction sachant que et la correction de la corde .
5. Les coordonnées Lambert de sont et . Déterminer alors les coordonnées Lambert de .
6. Calculer l’azimut de vers sachant qu’on néglige la correction de la corde de la direction et que .
Problème 10.3
On a mesuré une distance suivant la pente entre les points et avec .
1. Calculer la distance distance réduite à l’ellipsoïde de référence par la formule rigoureuse, on prendra le rayon de la Terre .
2. Calculer la distance réduite à la représentation plane Lambert si l’altération linéaire de la zone est de .
3. La direction a un azimut géodésique . Donner l’expression du gisement de en fonction de la convergence des méridiens et la correction de la corde, sachant que la représentation plane Lambert utilisée a comme que le point est au nord du parallèle origine.
4. On donne et la longitude de , calculer .
5. En déduire les coordonnées de si et .
6. Déterminer les coordonnées géographiques de .
On rappelle que: et .
Chapter 11 La Représentation Plane UTM
11.1 Définition et Propriétés
La représentation plane UTM (Universal Transverse Mercator) est l’une des représentations la plus utilisée dans le monde.
C’est une représentation :
-
conforme d’un modèle ellipsoïdique,
-
transverse : c’est-à-dire l’image de l’équateur (en partie) est l’axe (vers l’Est) et l’image d’un méridien appelé méridien central, de longitude qu’on suppose égale à 0, est l’axe (vers le Nord) du plan.
Les coordonnées rectangulaires d’un point sont des fonctions de la forme :
[TABLE]
où sont les coordonnées du point sur le modèle ellipsoïdique.
Soit un point sur le méridien origine, alors les coordonnées de son image sur le plan sont :
[TABLE]
sera déterminée en imposant que le long du méridien central ou origine, les longueurs sont conservées. Sur le méridien, la longueur est donnée par :
[TABLE]
d’où:
[TABLE]
11.2 Détermination des coordonnées UTM
11.2.1. Calcul Direct
Sur l’ellipsoïde, on a :
[TABLE]
le carré de l’élément de longueur infinitésimale, avec :
[TABLE]
[TABLE]
respectivement les rayons de courbure de la grande normale et de la méridienne, le demi-grand axe et la première excentricité de l’ellipsoïde de référence. On peut écrire que :
[TABLE]
En posant :
[TABLE]
avec la latitude isométrique, on a alors les coordonnées symétriques et orthogonales. L’expression de est égale à :
[TABLE]
Sur le plan, on a :
[TABLE]
On pose :
[TABLE]
où désigne le nombre complexe tel que . Entre et , on a la relation :
[TABLE]
où est une fonction à déterminer. La représentation étant conforme, la fonction est par suite une fonction analytique dans (l’ensemble des nombres complexes). La fonction est dérivable à tout ordre et développable en séries en tout point complexe. Considérons le point tel que et , ce qui donne .
Dans la représentation UTM, on restreint à varier dans l’intervalle . Cet intervalle définit un fuseau de méridien central et d’amplitude . Ainsi, la Terre est divisé en fuseaux qu’on numérote de 1 à 60 ce qui explique l’utilisation mondialement de la représentation UTM. Une interprétation géométrique de la représentation UTM est comme suit:
-
on considère un cylindre ayant une base elliptique, tangent à l’ellipsoïde modèle le long de la méridienne de longitude . A un point appartenant au fuseau on lui fait correspondre un point du cylindre (Fig. 11.1).
-
après développement du cylindre sur le plan, on obtient l’image .
On revient maintenant au développement de la fonction au voisinage de , on a l’expression :
[TABLE]
On se limite à n = 8. D’où:
[TABLE]
Pour , on a soit:
[TABLE]
On pose :
[TABLE]
Ce qui donne :
[TABLE]
D’où :
[TABLE]
avec :
[TABLE]
En posant :
[TABLE]
avec la deuxième excentricité, on obtient les coefficients :
[TABLE]
Le calcul de se calcule à partir du développement de en fonction de car . On exprime en fonction de de multiples de soit . En intégrant, on arrive à (voir en Annexe du présent chapitre):
[TABLE]
avec:
[TABLE]
[TABLE]
On pose:
[TABLE]
alors les formules définitives du calcul direct sont en s’arrêtant à l’ordre 8:
[TABLE]
En général, on applique à un facteur de réduction et une constante de translation en de , les coordonnées obtenues sont :
[TABLE]
11.2.2. Calcul Inverse
Ayant les coordonnées en UTM et la longitude du méridien central, comment on calcule . On commence en revenant à:
[TABLE]
Par suite, en utilisant les variables : et , on cherche à déterminer une fonction analytique telle que:
[TABLE]
Pour celà, on considère sur l’axe le point (Fig. 11.2), il lui correspond l’affixe , sur l’ellipsoïde il est l’image de .
D’où le développement de au point :
[TABLE]
Or: ce qui donne :
[TABLE]
On pose :
[TABLE]
d’où :
[TABLE]
avec:
[TABLE]
En posant avec la deuxième excentricité , et , on obtient les coefficients:
[TABLE]
Ayant , on calcule en utilisant la formule:
[TABLE]
Le calcul se fait par itérations.
11.2.3. Le Module linéaire
Le module linéaire est tel que :
[TABLE]
La représentation étant conforme, alors le module linéaire est indépendant de la direction, mais ne dépend que du point, on choisit de calculer le long des parallèles, soit , ce qui donne :
[TABLE]
Comme on a:
et que les coefficients sont des fonctions seulement de la latitude , d’où :
[TABLE]
et:
[TABLE]
En gardant les termes en et , on obtient :
[TABLE]
et:
[TABLE]
Par suite :
[TABLE]
En simplifiant et en négligeant les termes en , on trouve :
[TABLE]
Au lieu de prendre comme module linéaire, on le multiplie par un facteur appelé facteur de réduction de l’échelle généralement égal à 0.9996. Le module linéaire devient :
[TABLE]
On remplace par , on trouve la formule du module linéaire :
[TABLE]
11.2.4. Convergence des méridiens
Le gisement de l’image du méridien appelé ’convergence des méridiens’ et noté par en un point est donné en première approximation par la formule :
[TABLE]
est comptée dans le sens des gisements.
11.3 Annexe: Calcul de la longueur d’un arc de la méridienne d’un ellipsoïde de révolution
Soit un ellipsoïde de révolution défini par ses paramètres:
a: le demi-grand axe,
e: la première excentricité.
L’expression de la longueur de la méridienne entre l’équateur et un point de latitude géodésique est donnée par:
[TABLE]
avec:
[TABLE]
est le rayon de courbure de la méridienne.
L’intégrale (11.26) est une intégrale, dite elliptique, n’est pas exprimée par une formule finie. Pour la calculer, on fait l’usage d’un développement limité de l’expression .
On utilise la formule:
[TABLE]
avec , est un rationnel et désigne factoriel soit . Comme , on a donc à l’ordre 12:
[TABLE]
Pour pouvoir calculer les intégrales du type:
[TABLE]
on va exprimer les termes en fonction des lignes trigonométriques multiples de l’argument . Ce qui donne:
[TABLE]
L’équation (11.27) s’écrit en utilisant les expressions de droite de (11.28):
[TABLE]
En intégrant (11.29) entre 0 et et après multiplication par le coefficient , on trouve l’expression ci-dessous de la longueur de la méridienne:
[TABLE]
où les coefficient vérifient:
[TABLE]
avec:
[TABLE]
CQFD
11.4 Exercices et Problèmes
Exercice 11.1
Dans cet exercice, on voudrait justifier l’arrêt à l’ordre 8 de l’expression de en fonction de . On donne: et .
1. Calculer numériquement et .
2. Calculer numériquement le coefficient de (11.10).
3. On donne , calculer et conclure.
Problème 11.1
Soit le point de coordonnées géodésiques: et à l’Est de Greenwich. On considère la représentation plane UTM tronquée suivante, de méridien central = 9° définie par les formules :
[TABLE]
où et sont exprimées en , avec:
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
[TABLE]
1. Montrer que les coordonnées du point sont: , on justifie les résultats.
2. Soit le point de coordonnées . Sachant que est situé sur le même parallèle que , calculer la longitude de .
3. Calculer le gisement et la distance .
4. Sachant que la convergence des méridiens est donnée par et qu’on néglige le , calculer l’azimut de la direction .
5. Calculer l’azimut de vers en négligeant le de vers .
6. En calculant les coordonnées UTM de et , on trouve respectivement . Calculer la distance par les coordonnées UTM. En déduire l’erreur relative sur la distance en utilisant les coordonnées de l’UTM tronquée.
Chapter 12 Les Transformations Entre Les Systèmes Géodésiques
12.1 Introduction
Avec l’introduction de la technologie de positionnement par GPS (Global Positioning System), laquelle fournit à l’utilisateur sa position tridimensionnelle dans le système géocentrique mondial dit (World Geodetic System 1984), il est nécessaire de savoir la transformation de passage du système géodésique mondial au système géodésique national ou local. On présente ci-après quelques modèles de transformations de passage entre les systèmes géodésiques.
On utilise par la suite les notations suivantes :
-
les coordonnées cartésiennes 3D dans le système local (système 1);
-
les coordonnées cartésiennes 3D dans le système géocentrique (système 2);
-
les coordonnées géodésiques dans le système 1;
-
les coordonnées géodésiques dans le système 2.
On propose d’étudier les transformations suivantes (C. Boucher, 1979b; T. Soler, 1998) :
-
le modèle de Bura111Milan Bura: géodésien tchèque.- Wolf222Helmut Wolf (1910-1994): géodésien allemand. ou Helmert à 7 paramètres,
-
les formules de Molodensky333Mikhail Sergeevich Molodensky (1909-1991): géodésien et géophysicien russe.,
-
les transformations bidimensionnelles.
12.2 Le Modèle de BURSA - WOLF
Ce modèle s’écrit sous la forme vectorielle :
[TABLE]
où:
-
est le vecteur de composantes , l’indice désigne transposée;
-
est le vecteur translation de composantes entre les systèmes 1 et 2;
-
est le facteur d’échelle entre les 2 systèmes;
-
est la matrice de rotation pour passer du système 1 au système 2;
-
est le vecteur de composantes .
En développant (12.1), on obtient:
[TABLE]
avec les rotations comptées positivement dans le sens contraire des aiguilles d’une montre. Comment a-t-on obtenu cette formule?
Posons:
[TABLE]
12.2.1. Matrices de Rotation
Dans (12.2), et sont les angles de rotation respectivement pour ramener les axes et parallèles aux axes et . Faisant abstraction de la translation entre les systèmes 1 et 2, soit un point dans le plan d’affixe , dans le plan le point a l’affixe . On peut écrire:
[TABLE]
En passant aux coordonnées, on a:
[TABLE]
En séparant les parties réelles et imaginaires de l’équation précédente, on obtient:
[TABLE]
En les écrivant sous forme matricielle:
[TABLE]
avec :
[TABLE]
Appelons les autres matrices de rotation. On a alors:
[TABLE]
Le modèle de Bura-Wolf est obtenu comme suit:
-
on fait subir une rotation autour de d’angle de matrice de rotation ;
-
on fait subir une rotation autour de d’angle de matrice de rotation ;
-
on fait subir une rotation autour de d’angle de matrice de rotation .
Le résultat est la matrice :
[TABLE]
Comme les angles de rotations sont petits , on va exprimer chaque matrice en gardant seulement les termes du deuxième ordre. On utilise les développements limités à l’ordre deux :
[TABLE]
Alors les formules (12.7-12.9) deviennent:
[TABLE]
En revenant à la formule (12.10), on obtient pour la matrice l’expression suivante à l’ordre 2:
[TABLE]
Maintenant, comme les trois angles sont petits, on va considérer que les termes du premier ordre ce qui donne pour :
[TABLE]
On revient à , on trouve:
[TABLE]
La formule (12.2) s’écrit:
[TABLE]
12.2.2. Calcul des Paramètres du Modèle de Bura-Wolf par les Moindres Carrés
En considérant comme inconnues les paramètres , l’équation (12.2) s’écrit en gardant les termes du 1er ordre comme suit :
[TABLE]
En utilisant l’équation (12.18) pour les n points communs dans les systèmes 1 et 2 et en posant :
[TABLE]
est la matrice :
[TABLE]
et le vecteur des résidus de la méthode des moindres carrés, la détermination des paramètres inconnus se fait par la résolution par les moindres carrés de l’équation :
[TABLE]
Soit :
[TABLE]
Le vecteur résidu est donné par :
[TABLE]
Le facteur de la variance unitaire est exprimé par la formule:
[TABLE]
et la matrice variance-covariance du vecteur est donnée par:
[TABLE]
12.3 Les Formules de MOLODENSKY
Un point a ses coordonnées géodésiques cartésiennes 3D dans un référentiel donné comme suit:
[TABLE]
avec :
-
le rayon de courbure de la grande normale;
-
le demi-grand axe de l’ellipsoïde de référence;
-
le carré de la 1ère excentricité;
-
l’aplatissement de l’ellipsoïde de référence.
On pose :
[TABLE]
Le rayon de courbure de la méridienne s’écrit:
[TABLE]
Soit:
[TABLE]
En calculant des équations (12.24) en fonction de et et sachant que , on trouve :
[TABLE]
où les matrices et sont les suivantes :
[TABLE]
[TABLE]
De l’équation (12.26), on tire:
[TABLE]
avec:
[TABLE]
[TABLE]
Or, en prenant:
[TABLE]
on a d’après l’équation (12.18) , par suite en posant:
[TABLE]
avec et sont respectivement les demi-grands axes et les aplatissements des ellipsoïdes des systèmes 1 et 2, on a alors :
[TABLE]
avec la matrice donnée ci-dessous:
[TABLE]
En développant l’équation (12.33), on obtient les formules de MOLODENSKY de passage du système 1 au système 2:
[TABLE]
[TABLE]
[TABLE]
Des équations (12.34)-(12.36), on remarque que :
-
est indépendante de et ;
-
est indépendante de ;
-
est indépendante de .
On trouve souvent dans la littérature géodésique des formules de MOLODENSKY dites Standard et Abrégées qu’on donne ci-dessous.
12.4 Les Formules de MOLODENSKY Standard
Elles sont obtenues en ne tenant pas compte du facteur d’échelle et des rotations c’est-à-dire et dans les formules (12.34)-(12.36) et on obtient alors les formules suivantes en posant :
[TABLE]
et en omettant les indices:
[TABLE]
avec le demi-petit axe de l’ellipsoïde 1.
12.5 Les Formules de MOLODENSKY Abrégées
On fait et garde les termes du 1er ordre en dans les formules Standard, on trouve :
[TABLE]
12.6 La Recherche des Paramètres de Passage par les Formules de MOLODENSKY
A partir de l’équation (12.33) on a :
[TABLE]
soit :
[TABLE]
où est le vecteur des inconnues . En écrivant l’équation précédente pour les n points communs et en posant :
[TABLE]
le vecteur des observations et :
[TABLE]
la matrice des coefficients et le vecteur des résidus de la méthode des moindres carrés, la détermination des paramètres inconnus se fait par la résolution par les moindres carrés de l’équation :
[TABLE]
Le vecteur solution est :
[TABLE]
Le vecteur résidu est :
[TABLE]
Le facteur de la variance unitaire est donné par :
[TABLE]
La matrice variance-covariance du vecteur est donnée par :
[TABLE]
12.7 La Détermination des paramètres du Modèle de Bura-Wolf
Dans ce paragraphe, on veut calculer manuellement les paramètres du modèle de Bura-Wolf vu précédemment:
[TABLE]
En développant (12.48), on obtient:
[TABLE]
avec les rotations comptées positivement dans le sens contraire des aiguilles d’une montre. Comment déterminer les paramètres modèle (12.48)?
12.7.1. Détermination de l’échelle
On suppose donné un ensemble de points pour connus dans les deux systèmes et . On écrit l’équation (12.48) pour deux points et , d’où:
[TABLE]
Par différence, on obtient :
[TABLE]
On prend la norme des deux membres de (12.52) et que :
[TABLE]
Comme est une matrice de rotation, donc son application à un vecteur est une isométrie, c’est-à-dire qu’elle laisse invariant la norme ou la longueur du vecteur, soit:
[TABLE]
On a donc:
[TABLE]
Soit:
[TABLE]
désigne le nombre de couples de points .
12.7.2. Détermination des rotations
Connaissant , pour un couple de points , on a :
[TABLE]
On détaille la matrice :
[TABLE]
avec la matrice unité et la matrice:
[TABLE]
Alors l’équation (12.52) devient:
[TABLE]
Comme et , on a:
[TABLE]
En posant:
[TABLE]
Alors, on obtient l’équation:
[TABLE]
ou encore:
[TABLE]
Or le déterminant de la matrice :
[TABLE]
est nul. Pour passer de cette conséquence, on utilise pour chaque ligne du système (12.63) un couple de points ce qui donne le système:
[TABLE]
Le système (12.65) devient résolvable ce qui permet de déterminer les trois rotations et .
12.7.3. Détermination des composantes de la Translation
Les composantes du vecteur translation sont déterminées à partir des coordonnées des points communs dans les deux systèmes à partir de:
[TABLE]
Les composantes sont obtenues par une moyenne sur les points communs à savoir:
[TABLE]
12.8 La Transformation de HELMERT Bidimensionnelle
Cette transformation s’écrit sous la forme vectorielle :
[TABLE]
où:
-
est le vecteur de composantes , désignent les coordonnées planimétriques du système 2;
-
est le vecteur translation de composantes entre les systèmes 1 et 2;
-
est le facteur d’échelle entre les 2 systèmes;
-
est la matrice de rotation pour passer du système 1 au système 2;
-
est le vecteur de composantes où désignent les coordonnées dans le système 1.
En développant (12.70), on obtient :
[TABLE]
En prenant comme inconnues auxiliaires :
[TABLE]
le système (12.71) devient :
[TABLE]
Les inconnues , et seront déterminées par la méthode des moindres carrés en utilisant des points communs dans les deux systèmes.
Ayant et , on déduit :
[TABLE]
12.8.1. Résolution par les Moindres Carrés
On résoud par la méthode des moindres carrés le système (12.74). On suppose la donnée de points communs entre le système et le système :
-
dans le système ;
-
dans le système .
On pose:
[TABLE]
les coordonnées respectives des centres de gravité, des points communs, dans et .
On pose de même:
[TABLE]
Dans ce cas, le système (12.74) s’écrit:
[TABLE]
Soit une solution approchée du système. On note alors:
[TABLE]
Alors les équations (12.78) deviennent:
[TABLE]
On écrit ces dernières équations sous la forme de l’équation des moindres carrés:
[TABLE]
avec le vecteur des inconnues:
[TABLE]
le vecteur des observables:
[TABLE]
le vecteur des résidus:
[TABLE]
et la matrice des coefficients:
[TABLE]
12.8.2. La Solution par les Moindres Carrés
La solution de (12.81) par les moindres carrés donne:
[TABLE]
On pose:
[TABLE]
qu’on appelle matrice normale du système (12.81). On obtient alors:
[TABLE]
Comme on travaille par rapport aux centres de gravité des coordonnées de et , on a alors par définition:
[TABLE]
De plus on note:
[TABLE]
Alors la matrice s’écrit facilement:
[TABLE]
La matrice normale est diagonale, son inverse est donné par:
[TABLE]
Or on sait que:
[TABLE]
où est le facteur de variance unitaire donné par :
[TABLE]
De l’équation (12.93), on voit que :
[TABLE]
Propriété 13.1 Dans une transformation de Helmert bidimensionnelle, plus le nombre de points communs entre les deux systèmes est grand, plus la détermination du vecteur translation est précise.
Quant aux deux autres inconnues (facteur d’échelle et la rotation), on a:
[TABLE]
Soit . Si on veut imposer égal à donné, quelles conditions doivent vérifier les . On a:
[TABLE]
Or:
[TABLE]
Par suite:
[TABLE]
D’où:
Propriété 13.2 Dans une transformation de Helmert bidimensionnelle, en imposant un écart-type donné de la rotation , la distance maximale qu’on peut prendre vaut .
12.9 Exercices et Problèmes
Exercice 12.1
On donne le modèle bidimensionnel suivant, de transformation entre deux systèmes géodésiques, défini par:
[TABLE]
1. S’agit-il du modèle bidimensionnel de Helmert? Justifier.
2. Donner les valeurs numériques respectivement du facteur d’échelle et de l’angle de la rotation entre les deux systèmes.
Exercice 12.2
Reprenant les tableaux données ci-dessous, calculer les coordonnées géodésiques des points sachant que l’ellipsoïde de référence est l’ellipsoïde GRS80 .
1. Calculer les coordonnées UTM en prenant le fuseau adéquat.
2. En considérant le modèle de Helmert entre les systèmes et , calculer les paramètres de la transformation.
3. Déterminer les images des points et .
Problème 12.1
Soient les trois tableaux ci-dessous des coordonnées 3D respectivement dans les systèmes et et à transformer dans le système :
[TABLE]
[TABLE]
[TABLE]
1. Déterminer les paramètres du modèle de Bura-Wolf à 7 paramètres.
2. Calculer les coordonnées 3D des points du troisième tableau dans le système .
Chapter 13 Les Systèmes des Altitudes
Le deuxième type de système géodésique est le référentiel vertical ou le datum vertical qui définit l’origine des altitudes des réseaux de nivellement. D’un pays à un autre, les altitudes sont définies autrement.
13.1 Les Systèmes d’Altitudes
Pour définir les altitudes, on utilise comme surface de référence, au lieu de l’ellipsoïde de référence géodésique, le géoïde (voir la définition 6.8). On rappelle la définition du géoïde comme suit:
” Le géoïde correspond à la surface de niveau coïncidant avec le niveau moyen des mers prolongé sous les continents par la condition d’y rester normal à toutes les lignes de forces. ”
Le géoïde est une surface équipotentielle qu’on peut prendre égal à 0, soit . Les surfaces de niveau n’étant pas parallèles et la différence de potentiel est indépendante du chemin suivi pour aller d’un point à un autre, alors on définit la cote géopotentielle au point de la surface topographique par :
[TABLE]
Or , d’où:
[TABLE]
où est la gravité mesurée et la denivelée mesurée (Fig.13.1).
Cependant, l’unité de n’est pas une unité métrique, car une , alors pour exprimer l’altitude en unité métrique, on définit ci-après les altitudes suivantes.
13.1.1. L’Altitude Orthométrique
L’altitude orthométrique est définie par :
[TABLE]
où :
[TABLE]
est la moyenne de du point au point sur le géoïde, cette valeur est inaccessible car sa connaissance nécessite une information sur la densité du sous sol. On remplace l’intégrale par une somme finie :
[TABLE]
D’où :
[TABLE]
est mesurée par le nivellement de précision et est une correction orthométrique donnée par :
[TABLE]
avec la latitude moyenne entre le point de départ et du point d’arrivée, l’altitude moyenne et la différence des latitudes des points de départ et d’arrivée.
13.1.2. L’Altitude Normale (ou de Molodensky)
Elle est donnée par :
[TABLE]
avec:
[TABLE]
où est la pesanteur normale entre le géoïde et la surface équipotentielle du point considéré. est la pesanteur normale à l’ellipsoïde au point de latitude . est estimée par :
[TABLE]
avec la gravité théorique au niveau zéro et à la latitude , donnée par la formule de Cassini (en ):
[TABLE]
13.1.3. L’Altitude Dynamique
Elle est donnée par :
[TABLE]
avec:
[TABLE]
13.1.4. L’Altitude GPS
Le GPS fournit une altitude ellipsoïdique géométrique . Celle-ci est en relation avec l’altitude orthométrique et l’ondulation du géoïde ou hauteur du géoïde par rapport à l’ellipsoïde du GPS, par l’équation :
[TABLE]
Chapter 14 **La Géodésie Tunisienne **
{svgraybox}
’Geodesists are amongst the men of science those that operate all over the World, regardless of boundaries, differences in race, religion, ideology. ’
( Antonio Marussi111Antonio Marussi (1908-1984): géodésien et géophysicien italien., 1974)
14.1 Introduction
L’un des éléments fondamentaux de l’infrastructure d’un pays est son réseau géodésique.
A ce sujet, la Tunisie a connu le début de la création de son premier réseau géodésique à partir des observations géodésiques de la liaison entre le Cap-Bon et l’île de Sicile en 1876 (Fig. 14.1).
Sur ce réseau vont être rattachés tous les travaux cartographiques et topographiques et particulièrement ceux de l’Immatriculation Foncière Facultative (IFF) et du Cadastre.
Cent ans après le début des observations du premier réseau géodésique en Tunisie, il s’était avéré la nécessité de revaloriser et moderniser ce réseau géodésique afin de satisfaire les besoins cartographiques et topographiques du pays avec le développement des appareils de mesures.
Ainsi, à partir de 1978, l’Office de la Topographie et de la Cartographie (OTC) a décidé de mener une campagne astro-géodésique qui va durer jusqu’à 1983.
Le nouveau réseau géodésique obtenu fait apparaître un décalage entre 0 à 10 mètres avec l’ancien réseau (Carthage34). L’adoption du nouveau réseau géodésique n’a pas été faite.
Avec le développement du positionnement géodésique avec les satellites GPS dans le système de référence mondial (World Geodetic System 84), un nouveau réseau de référence à vocation spatiale vient d’être observé en Tunisie en 1998. Les réseaux géodésiques classiques Tunisiens peuvent -ils répondre à la technologie GPS ? et de quelles manières ?
L’objet de ce chapitre est de décrire l’évolution des systèmes géodésiques terrestres tunisiens vers leur unification ainsi que l’adoption d’une nouvelle représentation plane adéquate pour toute la Tunisie.
Dans la suite, on s’intéresse aux réseaux géodésiques planimétriques.
14.2 Historique
Les premiers points géodésiques ont été créés en 1876 par les géodésiens italiens lors de la liaison entre le Cap-Bon et l’île de Sicile (Fig. LABEL:fig:Jonction). Le premier réseau géodésique tunisien a été défini à partir de l’extension du réseau Algérien, par l’observation du point astronomique Carthage en 1878 et la mesure de l’azimut astronomique de la direction Carthage - Bir Bou Regba pour l’orientation du réseau (C. Fezzani, 1979).
Avant 1978, la structure géodésique tunisienne était comme suit (Fig. 14.2):
-
un réseau géodésique dit du 1er ordre formé par le parallèle de Tunis au nord et le parallèle de Gabès au sud reliés par la méridienne dite de Gabès, les longueurs des côtés varient de 30 à ;
-
un réseau géodésique du 1er ordre complémentaire;
-
un réseau géodésique du 2ème ordre;
-
un réseau géodésique du 2ème ordre complémentaire;
-
les réseaux géodésiques de détail du 3ème et 4ème ordre;
-
un canevas de points astronomiques au sud (Sahara).
A un réseau de points géodésiques est associé le système géodésique c’est-à-dire les éléments de référence à partir desquels sont calculées les coordonnées géographiques ( latitude, longitude ) ou les coordonnées planimétriques . On donne ci-dessous les systèmes les plus utilisés en Tunisie.
14.3 Les Systèmes Géodésiques en Tunisie
14.3.1. Le Système Géodésique ’Voirol’
C’était le premier système en Tunisie caractérisé par :
-
le point fondamental (point de départ) : Voirol près d’Alger créé en 1875;
-
la surface de référence c’est-à-dire le modèle choisi pour la Terre est l’ellipsoïde de Clarke Français 1880;
-
l’orientation de départ est l’azimut astronomique de la direction Voirol-Meleb El Kora mesuré en 1874;
-
la mise à l’échelle ou la qualité métrique de réseau : la mesure d’une distance ou base à Blida en Algérie mesurée en 1854.
Une grande partie du premier réseau géodésique terrestre tunisien était calculé dans ce système.
14.3.2. Le Système Géodésique ’Carthage34’
A la suite de la détection d’une erreur dans la mise à l’échelle du système Voirol en 1910 et vu sa qualité, le Service Géographique de l’Armée Française (S.G.A.F) a établi un nouveau système géodésique indépendant du système Voirol. Les éléments de définition de ce système sont :
-
le point fondamental : le point Carthage en Tunisie;
-
l’ellipsoïde de référence : l’ellipsoïde de Clarke Français 1880;
-
l’azimut de l’orientation : l’azimut astronomique de la direction Carthage - Bir Bou Regba;
-
la mise à l’échelle : les bases de Tunis et de Medenine.
Les calculs des coordonnées des points géodésiques de la partie nord ont été achevés en 1934.
Bien que l’ellipsoïde de référence est le même, les deux systèmes géodésiques Voirol et Carthage34 ont des origines différentes ce qui explique les décalages en longitude et latitude géodésiques. Ainsi au point fondamental Carthage, par exemple, on a les différences suivantes :
[TABLE]
qui se traduisent par un décalage moyen planimétrique de en et de en .
14.4 Les Représentations Planes
A un système géodésique donné, on peut lui associer plusieurs types de représentations planes. On donne ci-dessous les représentations planes en usage en Tunisie.
14.4.1. La Représentation de Bonne
La représentation de Bonne222Rigobert Bonne (1727-1795): ingénieur, mathématicien et cartographe français. est une représentation équivalente (conserve les surfaces). Elle n’est plus en usage mais elle était utilisée pour le découpage cartographique des cartes aux échelles 1/50 000, 1/100 000 et 1/200 000 (version ancienne).
14.4.2. La Représentation des Fuseaux
Elle a été utilisée dans le système géodésique Voirol pour le besoin de la triangulation et reste en usage dans les travaux de l’immatriculation foncière facultative pour traiter certains anciens dossiers (C. Fezzani, 1979).
Dans cette représentation, la Tunisie était partagée en six fuseaux, d’une étendue chacun de 0.5 grades en longitude, subdivisés chacun en onze quadrilatères curvilignes de de côté en latitude (Fig. 14.3). Cette représentation plane fut abandonnée en 1922 pour être remplacée par la représentation plane Lambert Tunisie.
Les formules des coordonnées Fuseaux en un point de coordonnées , avec les coordonnées du centre du quadrilatère considéré, sont comme suit (A. Ben Hadj Salem, 2013):
[TABLE]
avec les coefficients:
[TABLE]
où sont exprimés en en comptant les longitudes positives à l’Ouest de Greenwich et les 2 rayons de courbure de l’ellipsoïde de Clarke Français 1880 pour .
14.4.3. La Représentation Lambert
C’est une représentation conforme (conserve les angles) d’un modèle ellipsoïdique. Afin d’éviter les déformations trop importantes, la représentation Lambert Nord Tunisie a été adoptée pour la partie Nord du pays (latitude comprise entre et et la représentation Lambert Sud Tunisie a été adoptée pour la partie sud (latitude comprise entre et . La représentation Lambert Tunisie est nommée à l’OTC sous l’appellation "Origine Unique ".
Pour la Tunisie, on considérait un système d’axes tel que l’axe est la tangente à l’image du parallèle origine au point dirigé vers l’Ouest et est porté par l’image du méridien origine dirigé vers le Nord (Fig. 14.4), dit repère STT333STT: Service Topographique Tunisien, premier service tunisien chargé des travaux topographiques et foncières fut créé en 1882, deviendra plus tard l’OTC.. Soit le point de avec , on a alors les coordonnées planes :
[TABLE]
avec comptée positivement à l’Est du méridien origine des longitudes.
Avec l’introduction du facteur de réduction de l’échelle, les formules des coordonnées rectangulaires deviennent :
[TABLE]
Pour obtenir des coordonnées rectangulaires positives, on définit pour la Tunisie un repère tel que et soient dirigés respectivement vers l’Est et le Nord (Fig. 14.5).
Dans le nouveau repère , on a donc:
[TABLE]
Les quantités et sont respectivement les constantes de translation en et en .
Due à l’importance de l’altération linéaire, la Tunisie est partagée en deux zones avec les caractéristiques suivantes:
[TABLE]
avec une amplitude de du parallèle origine.
14.4.4. La Représentation Plane U.T.M.
C’est une représentation conforme. Le modèle terrestre est un ellipsoïde divisé en 60 fuseaux de 6° d’amplitude, chacun de 3° de longitude de part et d’autre du méridien central. Dans la représentation UTM, toute la Tunisie se trouve dans le fuseau 32 avec le méridien de longitude 9° à l’Est de Greenwich comme méridien central.
Cette représentation a été utilisée dans le système géodésique Europe50 (usage militaire) et dans les nouvelles cartes aux échelles 1/200 000 et 1/50 000 éditées par l’OTC.
14.5 Pourquoi Un Nouveau Système Géodésique?
Suite à la publication du décret-loi relatif à l’mmatriculation foncière obligatoire en 1964 et à la promulgation du Code des droits réels en 1965 d’une part, et le début de la mission cartographique du Service Topographique Tunisien d’autre part, il était impératif de mettre en place les infrastructures nécessaires pour réaliser les travaux de cartographie et de topographie dans un nouveau système géodésique national basé sur une nouvelle géodésie.
A cet effet, un premier diagnostic a été effectué en 1969 sur l’état de la géodésie tunisienne (A. Fontaine, 1969).
L’analyse de l’état de ces réseaux a montré des insuffisances aux niveaux de la qualité de l’échelle et de l’orientation.
14.6 Les Travaux de Modernisation des Réseaux Géodésiques Tunisiens
Grâce à la prise de conscience à la Direction de la Topographie et de la Cartographie (DTC)444En 1970, le Service Topographique Tunisien (STT) devenait la Direction de la Topographie et de la Cartographie au Ministère des travaux publics. de l’importance des sciences géographiques et en particulier de l’aspect géodésique, un protocole d’accord a été conclu entre la DTC et l’Institut Géographique National de France (IGNF) en 1972.
Ce protocole concernait l’étude et l’analyse des calculs de compensation des réseaux géodésiques tunisiens du 1er et 2ème ordre. L’analyse de l’état de ces réseaux (C. Fezzani, 1979) a montré des insuffisances aux niveaux de la qualité de l’échelle (1/40 000 à 1/30 000) et de l’orientation à . De plus, de nombreux points géodésiques ont disparu et d’autres ont été détruits d’où la nécessité de reprendre des travaux géodésiques pour revaloriser les réseaux géodésiques tunisiens.
14.6.1. Les Travaux de la Revalorisation de la Géodésie Tunisienne
A partir de 1978, l’OTC a décidé des travaux pour moderniser les réseaux géodésiques tunisiens afin de satisfaire les besoins cartographiques et topographiques du pays en commençant par le réseau géodésique de base.
Ces travaux de revalorisation des réseaux géodésiques tunisiens ont pour objectifs:
-
l’abolition définitive de l’utilisation des différents systèmes géodésiques terrestres de types " isolés et fuseaux " en usage depuis plus d’un siècle;
-
la création d’un référentiel géodésique terrestre unique pour la Tunisie;
-
la mise en place d’une nouvelle représentation plane qui convient le mieux pour la Tunisie à savoir l’UTM.
Les travaux de revalorisation de la géodésie Tunisienne (M. Charfi, 1983) comprenaient :
-
la réfection des anciens points du 1er ordre, du 1er ordre complémentaire, du 2ème ordre et du 2ème ordre complémentaire;
-
la construction de nouveaux points sur les sites des anciens points disparus;
-
la densification de l’ancien réseau par de nouveaux points;
-
les observations angulaires azimutales et zénithales;
-
la détermination de 8 points de Laplace;
-
la mesure des côtés de 8 triangles géodésiques;
-
la détermination de 5 points par la méthode Doppler;
-
la compensation des observations terrestres avec les données Doppler pour obtenir les nouvelles coordonnées du nouveau réseau.
Les observations des 8 points de Laplace et la mesure des côtés des 8 triangles géodésiques, les observations et le calcul des 5 stations Doppler ainsi que la compensation du réseau géodésique ont fait l’objet d’une convention signée entre l’OTC et l’IGNF en 1982, suite à un appel d’offres international.
Le nouveau réseau géodésique terrestre appelé Réseau Géodésique Primordial (RGP) est composé de 312 points comme suit :
-
143 points anciens;
-
112 nouveaux points construits sur les sites des anciens points disparus;
-
58 nouveaux points.
14.6.2. La Compensation du Réseau Géodésique Primordial
La compensation du RGP effectuée par l’IGNF comprenait les compensations planimétrique et altimétrique.
La compensation planimétrique de 1984 effectuée par l’IGNF a défini donc un nouveau système géodésique terrestre nommé OTC84. En comparant les coordonnées issues d’OTC84 et avec celles de Carthage34, on a trouvé que les coordonnées anciennes ont subi un déplacement sous la forme d’une rotation dans le sens des gisements dont le centre se trouve dans la région de J. Semmama et d’un angle de (2/1000 de grade). Les déplacements planimétriques varient de 0 à en s’éloignant du centre de la rotation.
14.6.3. Le Système Carthage86
Faute d’adopter les calculs de 1984, l’OTC a effectué par ses propres moyens un calcul de compensation des nouvelles observations angulaires en fixant les coordonnées Carthage34 des points anciens existants et ce-ci en trois phases:
-
la phase une : la zone du Nord;
-
la phase deux : la zone du Centre;
-
la phase trois: la zone du Sud.
Cette compensation a donné naisssance au système géodésique terrestre Carthage86, ayant le même ellipsoïde Clarke Français 1880. Les coordonnées des points géodésiques obtenues dans ce système sont à près de celles de Carthage34. Il faut signaler que les observations astronomiques de 1980 n’ont pas été introduites dans la compensation ce qui montre que l’orientation de Carthage86 est similaire à celle de Carthage34.
14.6.4. Les Résultats des Travaux de la Revalorisation de la Géodésie Tunisienne
A l’issu des travaux de calculs en 1984, on a obtenu un nouveau système géodésique - dit système géodésique OTC84 - matérialisé par le nouveau réseau géodésique appelé le Réseau Primordial Terrestre Tunisien constitué de 312 points géodésiques (Fig. LABEL:geo).
14.6.4.1. Le Système Géodésique OTC84
Les caractéristiques du système sont:
-
ellipsoïde de référence: ellipsoïde de Clarke 1880 Français;
-
les nouvelles observations angulaires + les anciennes observations angulaires pour les anciens points conservés (avant 1978);
-
les observations de 8 points de Laplace (latitude, longitude et azimut astronomiques) et de 24 distances dans 8 triangles;
-
la fixation de 5 points anciens (observés par Doppler) avec un écart-type de 0.50 ;
-
une compensation globale par la méthode des moindres carrés (312 points).
Le décalage entre OTC84 et Cathage34: Il est sous la forme d’une rotation dont le centre est situé dans la région de Kasserine, et d’un angle de 25 dans le sens des gisements.
Ce phénomène a été observé dans la plupart des pays qui ont changé de système géodésique. Voici ci-dessous un exemple de la Suisse où on montre les décalages entre le système ancien (LV03) et le nouveau (LV95). (Publication de l’Académie Bavaroise de Géodésie, 1997)
Le décalage entre OTC84 et Carthage34 a été jugé inacceptable pour le patrimoine national en matière de cadastre.
Résultat: Ce nouveau système géodésique n’a pas été appliqué.
D’où l’idée de la reprise des calculs des observations.
14.7 La Mise à niveau de la Géodésie Tunisienne
En 2001, l’OTC a entrepris un programme de mise à niveau de la géodésie Tunisienne (A. Ben Hadj Salem, 1999).
Cette mise à niveau comprenait:
-
- l’unification des systèmes géodésiques terrestres;
-
- la création d’un réseau géodésique de base à référence spatiale;
-
- la détermination d’un géoide précis pour la Tunisie;
-
- la mise en place d’une nouvelle représentation cartographique pour la Tunisie.
L’objectif de cette mise à niveau est:
- d’unifier les différents systèmes en un seul référentiel géodésique terrestre homogène et précis, qui permettra d’une part la densification du réseau et l’exploitation des nouvelles techniques spatiales de positionnement dans les meilleures conditions et d’autre part de lever et de rétablir les limites bornées sans se reférer obligatoirement aux titres riverains.
Les impératifs de la mise à niveau étant:
-
la non altération des formes et des surfaces des parcelles;
-
la préservation des orientations des directions dans la limite des tolérances requises.
Une commission technique a été créée en décembre 2001 pour la mise en oeuvre de cette mise à niveau.
La réalisation de cette mise à niveau a commencé par l’établissement du Réseau Géodésique GPS Tunisien d’Ordre Zéro constitué de 28 points répartis sur tout le territoire (Fig. 14.8).
A partir de ce réseau, la désorientation du système Carthage34 a été vérifiée.
Disposant d’un logiciel de calculs géodésiques, la commission a procédé à un nouveau calcul des observations.
14.7.1. Comparaisons des coordonnées des système Carthage34 et OTC84
La comparaison des coordonnées Lambert Nord Tunisie de 48 points dans les deux systèmes a permis de modéliser le décalage entre le système Carthage34 et le nouveau calcul par une transformation mathématique conforme du type :
[TABLE]
avec :
-
" " le centre de la rotation : point fictif près du point géodésique Gassaat Ej Jahfa, situé dans la région de Kasserine;
-
" " l’angle de rotation = -27 .
14.7.2. Les Conclusions de la Commission Technique
Après études et tests des coordonnées issues du nouveau calcul, la Commission technique a abouti aux résultats suivants:
-
le système OTC84 laisse invariant les formes, les directions et les surfaces dans les tolérances requises;
-
l’homogénéité de ce système géodésique offre :
-
un meilleur passage au système spatial ;
-
une parfaite intégration des futurs travaux géodésiques et topométriques dans le référentiel spatial.
La Commission technique a proposé d’adopter le système OTC84 le nouveau système géodésique terrestre tunisien appelé NTT (Nouvelle Triangulation Tunisienne).
14.8 L’Arrêté du 10 Février 2009
L’arrêté du ministre de la Défense nationale du 10 février 2009, paru dans le Journal Officiel de la République Tunisienne n° 14 du 17 février 2009, fixe:
-
le système national de référence unifié de la géodésie;
-
le système national de référence de la représentation cartographique;
-
le système national de référence du nivellement.
14.8.1. Le Système National de Référence Unifié de la Géodésie
Il est défini par :
-
le système national géodésique des coordonnées géographiques appelé - la Nouvelle Triangulation Tunisienne - (NTT);
-
l’ellipsoïde associé: c’est l’ellipsoïde de Clarke 1880 Français ( m, m).
14.8.2. Le Système National de Référence de la Représentation Cartographique
Le système national actuel de référence de la représentation cartographique est défini par la représentation plane Universal Transverse Mercator (UTM), fuseau 32 Nord.
Les caractéristiques de la représentation UTM :
Définition: C’est une représentation:
-
conforme c’est-à-dire conserve les angles;
-
cylindrique ====> on utilise les coordonnées rectangulaires ;
-
transverse ====> et
d’un modèle ellipsoïdique.
- Les éléments de définition sont:
-
l’ellipsoïde de référence est celui de Clarke Français 1880;
-
le méridien origine: 9° à l’Est de Greenwich ou fuseau n°32;
-
le facteur d’échelle : ;
-
la constante en ;
-
la constante en .
14.8.3. Le Système National de Référence du Nivellement
On utilise le système des altitudes orthométriques. Le point fondamental ou référence des altitude est le repère scellé sur le monument Porte de France à Tunis avec une altitude de au dessus du niveau moyen de la mer (Nouvelle compensation du Réseau de Nivellement Général de la Tunisie - 1961). Cette référence a été déterminée à partir de mesures du niveau moyen de la mer faites au marégraphe de la Goulette. Le système d’altitudes est appelé le Nivellement Général de la Tunisie (NGT).
Le Nivellement Général de la Tunisie comprend :
-
un réseau de nivellement de précision du 1er ordre;
-
un réseau de nivellement de précision du 2ème ordre;
-
un réseau de nivellement de précision du 3ème ordre.
14.9 Conclusions
L’arrêté du 10 février 2009 a défini les fondements de la géomatique en Tunisie, car un pays sans les définitions précises de ses référentiels de géodésie, de nivellement et de cartographie ne peut avancer en la matière.
L’unification des systèmes géodésiques terrestres va permettre:
-
d’abolir l’utilisation des systèmes isolés;
-
le développement des bases de données et les systèmes d’informations géographiques sur l’ensemble du pays;
-
d’assainir le système foncier tunisien sur des bases solides;
-
de développer en harmonie l’application des technologies actuelles de positionnement spatial et celles du futur.
Chapter 15 Notions sur le Mouvement d’un Satellite Artificiel de la Terre
Avant de passer au chapitre sur le système GPS, il est utile pour le lecteur d’avoir des notions sur le mouvement d’un satellite artificiel autour de la Terre.
15.1 Les Equations du Mouvement
On considère un satellite de masse dont la position est définie par le vecteur . La Terre est considérée comme une masse ponctuelle de masse située au point centre de la Terre ().
L’équation du mouvement du satellite est donnée par:
[TABLE]
avec F la force d’attraction gravitationnelle et est la constante universelle de la gravitation de valeur égale à (H. Moritz & I.I. Mueller, 1988).
L’équation (15.1) s’écrit aussi:
[TABLE]
On dit que F dérive du potentiel avec:
[TABLE]
On pose:
[TABLE]
L’équation (15.1) s’écrit:
[TABLE]
Comme:
[TABLE]
alors l’équation vectorielle (15.5) s’écrit en trois équations différentielles du deuxième ordre comme suit:
[TABLE]
Après l’intégration des équations (15.6), on obtient six paramètres des conditions initiales qui définissent la forme et la position de l’orbite et une constante donnant la variation du mouvement du satellite avec le temps.
Les équations (15.6) montrent qu’on a un mouvement d’un corps dans un champ central.
15.1.1. La 2ème Loi de Kepler
- Si on applique le théorème du moment cinétique, on obtient:
[TABLE]
car:
[TABLE]
En effet, en dérivant (15.8) par rapport au temps, on a alors:
[TABLE]
Or d’après (15.5):
[TABLE]
D’où:
[TABLE]
On déduit donc (15.8) et on a:
[TABLE]
De (15.8), le mouvement se fait dans un plan, en définissant , alors les composantes de v vecteur vitesse sur le rayon vecteur r et de la direction perpendiculaire sont:
[TABLE]
On a alors:
[TABLE]
et aussi:
[TABLE]
avec la surface balayée par le vecteur position.
Des équations (15.13) et (15.14), on a la 2ème loi de Kepler:
[TABLE]
Théorème 15.1
(Deuxième loi de Kepler, ou loi des aires) L’aire balayée par le vecteur position varie linéairement avec le temps.
- Si on applique le théorème de l’énergie cinétique sous forme différentielle, on obtient:
[TABLE]
où:
[TABLE]
En remplaçant (15.17) dans le second membre de (15.16) et en intégrant, on arrive à :
[TABLE]
Soit:
[TABLE]
où est la constante de l’énergie ou l’énergie.
Lemme 15.1
Les fonctions et sont constantes le long des solutions: on dit que ce sont des intégrales premières du mouvement, c’est-à-dire que et sont des fonctions de la position et de la dérivée première de par rapport au temps (), constantes au cours du temps.
En effet, des équations (15.11) et (15.18), on a respectivement:
[TABLE]
et:
[TABLE]
On note que s’appelle aussi le hamiltonien111En hommage à Sir William Rowan Hamilton (1805-1865): mathématicien, physicien et astronome irlandais. du mouvement keplérien. En effet, est l’énergie cinétique et est le potentiel et on retrouve l’expression de donnée par l’équation (15.18).
15.1.2. La 1ère loi de Kepler
En multipliant vectoriellement à droite les membres de l’équation (15.5) par , on obtient:
[TABLE]
Comme C est constant, l’équation (15.19) s’écrit:
[TABLE]
Après intégration, on a:
[TABLE]
ou:
[TABLE]
On appelle l vecteur de Laplace. On multiplie l’équation (15.20) par r, on obtient :
[TABLE]
Comme:
[TABLE]
et:
[TABLE]
(15.21) devient:
[TABLE]
En posant:
[TABLE]
on déduit de (15.22):
[TABLE]
d’où:
Théorème 15.2
(1ère loi de Kepler) L’orbite décrite par le vecteur de position r est une conique (ellipse) définie en coordonnées polaires . L’angle compté, entre la direction du vecteur de Laplace l ou OP (périgée) et le rayon vecteur r, s’appelle l’anomalie vraie.
On a :
[TABLE]
Par suite:
[TABLE]
15.1.3. La 3ème Loi de Kepler
D’après la 2ème loi de Kepler donnée par (15.15):
[TABLE]
d’où:
[TABLE]
En intégrant (15.26) sur une période, on obtient:
[TABLE]
Soit:
[TABLE]
Comme et la période, on a finalement:
[TABLE]
C’est la 3ème loi de Kepler.
Théorème 15.3
(3ème loi de Kepler) Le carré de la période est proportionnel au cube du demi-grand axe de l’ellipse.
15.2 Eléments de l’orbite
Après l’intégration des équations du mouvement du satellite artificiel, on obtient six paramètres qui définissent la position du plan de l’orbite, ses dimensions, appelés les éléments d’orbite et ce sont:
-
- le demi-grand axe;
-
- la première excentricité;
-
- l’angle d’inclinaison;
-
- l’ascension droite du noeud ascendant;
-
- l’argment;
-
- l’instant de passage au périgée.
15.2.1. Les Coordonnées
En conséquence de la 3ème loi de Kepler (15.28), on peut écrire:
[TABLE]
est appelé vitesse moyenne angulaire. A partir de (15.29), on définit l’anomalie moyenne à l’instant par:
[TABLE]
A l’aide de la figure (Fig. 15.2), on va exprimer les coordonnées du satellite dans le plan de l’orbite:
où:
-
est le centre de gravité de la terre et aussi un foyer de l’ellipse;
-
la position du satellite;
-
l’anomalie vraie;
-
l’angle est appelé l’anomalie excentrique;
-
l’axe est perpendiculaire à l’axe et l’axe est perpendiculaire au plan .
On sait que dans le repère , on a:
[TABLE]
Maintenant, d’après la première loi de Kepler, l’aire balayée par le vecteur position OS entre les instants et vaut:
[TABLE]
Comme l’ellipse de paramètres est obtenue par affinité de rapport du cercle centré en et de rayon . Donc:
[TABLE]
où la surface est celle du triangle curviligne , elle est égale à la différence du secteur circulaire et du triangle soit:
[TABLE]
et l’aire du triangle vaut:
[TABLE]
Comme:
[TABLE]
d’où:
[TABLE]
On peut écrire alors en utilisant (15.32) que:
[TABLE]
L’équation:
[TABLE]
s’appelle l’équation de Kepler.
Cette relation est importante, puisqu’elle permet de calculer en fonction du temps et par suite de déterminer voir l’équation (15.36) ci-dessous, et .
On peut calculer la valeur de l’anomalie excentrique par la méthode itérative. A la première itération, on prend:
[TABLE]
et:
[TABLE]
En utilisant (15.33), on a:
[TABLE]
En faisant un développement au premier degré, on obtient:
[TABLE]
Comme est petit, on a et , on arrive à:
[TABLE]
On prend maintenant:
[TABLE]
et on applique (15.34) et ainsi de suite jusqu’à ce que soit négligeable devant la précision désirée.
Dans le repère , on peut écrire les coordonnées du satellite sous la forme:
[TABLE]
Ce qui donne:
[TABLE]
Or d’après (15.31), on a:
[TABLE]
d’où:
[TABLE]
On exprime maintenant les coordonnées du satellite dans le référentiel céleste à l’aide de la figure (Fig.15.1). Il est nécessaire de faire successivement:
une rotation de autour de l’axe ; 2. 2.
une rotation de autour de l’axe ; 3. 3.
une rotation de autour de l’axe .
Les matrices de rotations sont les suivantes:
[TABLE]
[TABLE]
et:
[TABLE]
D’où:
[TABLE]
Ce qui donne après calculs:
[TABLE]
En posant:
[TABLE]
On obtient comme :
[TABLE]
Si on veut calculer les coordonnées du satellite dans le référentiel terrestre , on a :
[TABLE]
où est le temps sidéral de Greenwich au temps . Il vaut:
[TABLE]
avec le Temps Universel corrigé (en heures) et l’heure sidérale à Greenwich à 0h TU(Temps Universel).
15.3 Les Perturbations des Orbites
On a vu dans le chapitre précédent le mouvement d’un satellite artificiel autour de la terre sous l’action de la force gravitationnelle. Le mouvement réel du satellite est sous l’effet de la force centrale gravitationnelle et d’une force supplémentaire. On supposera que cette force est petite par rapport à la force centrale. On l’appelle force perturbatrice.
Cette force perturbatrice est la somme de forces d’origine gravitationnelle et d’autres non gravitationnelles. Dans le cas général, une force perturbatrice f en un point est fonction de ses coordonnées, de sa vitesse et du temps . On peut écrire alors:
[TABLE]
Les équations du mouvement en coordonnées rectangulaires obtenues en complètement les équations du problème de la façon suivante:
[TABLE]
Comme une force perturbatrice est d’origine gravitationnelle, elle dérive d’un potentiel qu’on note soit:
[TABLE]
Alors les équations précédentes s’écrivent:
[TABLE]
On fait un changement de variables tel que:
[TABLE]
Le système (15.45) devient un nouveau système différentiel d’ordre 2 de six inconnues de la forme:
[TABLE]
Ces six nouvelles variables sont appelées les éléments osculateurs ou instantanés.
La solution des équations du mouvement est possible par une méthode analytique ou numérique. On peut dire que le satellite se mouve le long de l’orbite keplérienne, mais les éléments de l’orbite sont, dans ce cas, des fonctions du temps. On l’appelle orbite osculateur.
Comme f a été supposée petite, la solution du système d’équations des éléments osculateurs se présentera en général sous la forme:
[TABLE]
où seront des petites quantités. Elles sont appelées les perturbations des éléments de l’orbite. L’intérêt de l’emploi des variables osculatrices est que la solution est exprimée sous la forme d’un petit complément à des quantités fixes.
15.4 L’Influence du champ de la pesanteur sur le Mouvement du Satellite Artificiel
Un point de masse unité est soumis au potentiel de gravitation et au potentiel de la force centrifuge due à la rotation de la terre.
L’expression de est :
[TABLE]
Malheureusement, cette expression n’est pas calculable car on ignore la distribution des masses à l’intérieur de la Terre. Il faut appliquer un développement de en fonctions sphériques sous la forme suivante:
[TABLE]
où:
-
sont les coefficients qu’on obtient par l’observation et ils sont connus;
-
on les appelle les harmoniques sphériques ou polynômes de Legendre de deuxième espèce.
Les interprétations des premiers coefficients sont données par:
[TABLE]
et:
[TABLE]
où:
-
les coordonnées du centre de la masse terrestre;
-
les moments d’inertie principaux de la Terre;
-
les moments produits d’inertie;
-
la masse de la Terre;
-
le demi-grand axe de l’ellipsoïde terrestre.
Dans le cas où la Terre est représentée par un ellipsoïde de révolution, est indépendant de la longitude et s’écrit:
[TABLE]
avec:
[TABLE]
l’aplatissement de l’ellipsoïde terrestre et la vitesse angulaire de la rotation de la Terre.
Dans ce cas, on considère le système de coordonnées localisé au centre de la masse terrestre et l’axe confondu avec l’axe de rotation. En conséquence, on a:
[TABLE]
On a aussi tous les coefficients harmoniques tesseraux et sectoriaux nuls:
[TABLE]
On peut mettre:
[TABLE]
On obtient alors la formule suivante (B. Morando, 1974):
[TABLE]
15.5 Exercices et Problèmes
Exercice 15.1
1. Montrer que: .
2. Démontrer à partir des formules du cours la relation:
[TABLE]
Aide: exprimer en fonction de .
Exercice 15.2
A partir de l’expression de , montrer que vérifie l’équation du mouvement non perturbé pour la composante , soit:
[TABLE]
Exercice 15.3
Les altitudes d’un satellite artificiel au périgée et à l’apogée sont respectivement 200 km et 500 km.
1. Donner les valeurs des paramètres de l’orbite et .
2. Calculer les vitesses au périgée et à l’apogée et .
Problème 15.1
La Terre est supposée sphérique, homogène de rayon . Le produit de la constante universelle de gravitation terrestre par la masse de la Terre soit . Un satellite géodésique a une trajectoire telle que son altitude maximale est et son altitude minimale .
1. Donner la période de ce satellite.
2. Quelle est l’excentricité de sa trajectoire?
3. On mesure la distance du satellite à une station au sol de latitude et d’altitude nulle, lors du passage du satellite à la verticale de la station, soit .
a - Quelle est l’anomalie vraie du satellite à cet instant, sachant qu’il vient de passer au périgée.
b - Combien de temps s’est écoulé depuis le passage au périgée?
Problème 15.2
Une comète décrit autour du Soleil une ellipse d’excentricité de demi-grand axe et de demi-petit axe où le Soleil occupe un des foyers. L’équation de l’orbite de la comète en coordonnées polaires est donnée par:
[TABLE]
avec la distance Soleil- comète.
1. Déterminer les distances et lorsque la comète est à l’apogée et au périgée en fonction de et .
2. La comète de Halley a une orbite fortement excentrique : son apogée est à 0.53 du Soleil et sa périgée est à 35.1 . Calculer .
3. En utilisant la loi des aires et la troisième loi de Kepler, montrer que la constante des aires est exprimée par:
[TABLE]
où désignent respectivement la constante de la gravitation universelle et la masse du Soleil.
4. On pose : . Donner l’expression du carré de la vitesse de la comète en fonction de et . Montrer que peut s’écrire sous la forme:
[TABLE]
5. Déterminer l’expression du rapport des vitesses à l’apogée et au périgée en fonction de .
6. Calculer numériquement ce rapport pour le cas de la comète de Halley.
On donne:
- 1 ;
- ;
- .
Problème 15.3
Soient deux corps et soumis à l’attraction universelle dans un repère orthonormé . On pose:
[TABLE]
avec la constante universelle de la gravitation.
1. Montrer que les équations du mouvement des points dans sont données par:
[TABLE]
2. Soit le centre de gravité des deux corps . Montrer que vérifie:
[TABLE]
En déduire que le mouvement de est rectiligne et uniforme dans .
3. On pose , . En déduire que :.
4. On note :
[TABLE]
Montrer qu’on a:
[TABLE]
5. Quel est le mouvement de .
Chapter 16 Le Système GPS
16.1 Introduction
Le système de positionnement global (Global Postioning System GPS), appelé aussi NAVSTAR/GPS (Navigation System by Timing And Ranging), est un système de navigation par repérage du temps et mesures des distances, et c’est un système mondial de positionnement par satellites conçu et mis en service par le Département Américain de la Défense (DoD). Il détermine la position des points au sol équipés de récepteurs enregistrant des mesures d’origine satellitaire.
Il a été développé en vue du remplacement du système de positionnement TRANSIT (Doppler) qui présentait deux défauts importants:
-
une couverture satellitaire insuffisante;
-
une faible précision en navigation.
Les spécifications initiales sont d’avoir accès à une position absolue dans un système de référence mondial avec une précision métrique et au temps avec la précision de la microseconde.
Le développement du système GPS a commencé dans les années 70, la mise en place démarrant en 1978 par le lancement du premier satellite. Le système a été déclaré opérationnel par le DoD début février 1994. Depuis 52 satellites ont été lancés.
16.2 Aspects Généraux
16.2.1. Les Satellites
Le système complet comporte 34 satellites dont 31 sont opérationnels. Ils sont répartis de façon à assurer en tout lieu une visibilité simultanée de 4 à 8 satellites avec une élévation d’au moins 15° au dessus de l’horizon.
Les satellites sont répartis sur 6 plans orbitaux, ayant tous une inclinaison d’environ 55° sur l’équateur. L’orbite des satellites est quasi-circulaire, leur altitude est d’environ 20 000 km et leur période d’environ 12 heures.
Chaque satellite est muni d’un émetteur-récepteur, d’une horloge de haute précision, d’ordinateurs et d’équipements auxiliaires destinés au fonctionnement du système. On distingue cinq classes de satellites qui correspondent chacune à une étape dans la constitution du système:
-
Le *Block I *: 11 satellites lancés entre 1978 et 1985. Cet ensemble a constitué la phase initiale de test du système. Aucun satellite de ce bloc n’est utilisé à l’heure actuelle.
-
Le Block IIA : le premier a été lancé en avril 1991. Un seul satellite est en activité.
-
Le Block IIR : comprenant 11 satellites lancés entre 1997 et 2004 munis d’horloges en rubidium.
-
Le Block IIR-M est constitué de 7 satellites, lancés entre septembre 1997 et novembre 2009. Les derniers satellites émettent le deuxième signal civil L2C sur la fréquence L2.
-
Le Block IIF est constitué de 12 satellites dont le premier a été lancé en 2010 en émettant en plus le deuxième signal civil L2C et le troisième signal civil L5. Le dernier a été lancé en février 2016. La durée de vie de ces satellites est de 12 ans.
-
Trois satellites sont en réserve.
Le premier satellite de GPS III, la nouvelle génération des satellites GPS, serait lancé probablement en 2017.
Un secteur de contrôle composé de 5 stations au sol (Hawaii, Colorado Springs, Ascencion, Diago Garcia et Kwajalein) qui enregistrent en continu les signaux GPS sur les deux fréquences L1, L2 et sur la fréquence L2C (pour les satellites du Block IIR-M et du Block IIF) et la fréquence L5 (pour les satellites du Block IIF). Les tâches du secteur de contrôle sont:
-
capter les satellites GPS;
-
analyser les orbites et prédire;
-
mettre à jour les messages de navigation.
Le secteur de contrôle se compose de :
-
Monitor station (MS) : on observe les éphémérides et l’horloge,
-
Master control station (MCS) située à Colorado Springs où on effectue les opérations suivantes :
-
les calculs des erreurs;
-
les corrections de l’orbite et la fréquence d’horloge;
-
la création de nouveaux messages de navigation;
- Upload station (antennes sur terre) : on y envoie vers les satellites les messages de navigation.
16.2.2. Le Message GPS
Les satellites émettent en permanence deux signaux ultra-stables sur les deux fréquences spécifiques du système L1 et L2. Sur ces deux fréquences, est modulé un code particulier dont le décodage fournit le message GPS.
Ce message se compose des éléments suivants :
-
prévisions de l’orbite des satellites, provenant des stations de contrôle, afin de permettre aux utilisateurs d’effectuer des calculs de navigation en temps réel;
-
l’information concernant la qualité des horloges des différents satellites et le modèle de développement polynomial du comportement de ces horloges;
-
information d’ordre général sur le système.
16.2.3. Protection du Système GPS
Le système GPS était pourvu de deux processus qui permettent de limiter son utilisation civile et de protéger son utilisation militaire :
- L’accès sélectif (SA : Selective Availability) comporte deux dégradations :
-
dégradation de la fréquence de l’horloge des satellites par ajout d’un déphasage;
-
dégradation des éléments du message radiodiffusé (éphémérides des satellites, paramètres d’horloge des satellites).
Ces dégradations étaient connues et diffusées uniquement à des utilisateurs autorisés.
- L’antibrouillage (AS : Anti-Spoofing) est une protection destinée à éviter le brouillage volontaire du système GPS par un utilisateur qui enverrait un signal proche de celui de GPS, créant ainsi la confusion et des erreurs de positionnement pour les autres utilisateurs.
Ces deux protections ont été levées.
16.3 Les Instruments de mesures GPS
Pour optimiser l’utilisation du GPS, une gamme très variée de récepteurs a été mise en œuvre. Chaque type de récepteurs a ses spécifications :
-
GPS portatif : dans ce type d’instrument, il existe plusieurs modèles;
-
poids varie de 397 g à 850 g;
-
précision :
-
mesure absolue : 15 à 100 m;
-
mesure différentielle : 2 à 3m;
-
détermination de la position en deux dimensions avec trois satellites ou en mode de mesures à 3 dimensions (position et altitude avec 4 satellites);
-
GPS stationnaire : ce type d’instrument permet d’obtenir une meilleure précision que les instruments portatifs. On distingue suivant le mode de fixation du récepteur :
-
GPS fixé sur trépied : il permet de faire des mesures satellitaires en mode statique et statique rapide;
-
GPS mobile : l’antenne est fixée sur une tige. Il permet de réaliser le mode STOP and GO. Mais pour réaliser le temps réel, il nécessite un équipement radio supplémentaire qui permet à un poste fixe d’envoyer sa position à l’autre utilisateur.
16.3.1. Les Récepteurs Géodésiques
Les récepteurs géodésiques GPS sont des appareils qui enregistrent le message des satellites par l’intermédiaire d’une antenne stationnée sur un point dont on veut connaître la position. Par un processus basé essentiellement sur la connaissance du code qui module le signal reçu, les récepteurs effectuent les mesures GPS.
Ils décodent par eux-mêmes les messages provenant des satellites.
Il existe essentiellement deux types de récepteurs:
-
les récepteurs mono-fréquences qui n’enregistrent que les signaux de la fréquence L1;
-
les récepteurs bi-fréquences qui enregistrent les signaux des deux fréquences L1 et L2.
16.4 Principes de mesures GPS
Les satellites émettent des signaux qui sont reçus, interprétés par des récepteurs au sol. A partir d’une fréquence fondamentale (10.23 ), l’émetteur génère deux ondes L1 et L2 de fréquence respectivement 1575.42 et 1227.60 .
L1 et L2 sont modulées par des codes aléatoires (code C/A et code P) ainsi que par un message qui contient en particulier les données sur les éphémérides du satellite. Sur l’onde L1 on trouve le code C/A et le code P, tandis que sur L2, il n’y a que le code P. Le message existe sur les deux ondes.
Le récepteur génère une ou deux ondes qui sont une réplique des ondes L1 et L2 émises par le satellite, ainsi que le code C/A et le code P. Les mesures consistent à comparer cette réplique synthétisée avec le signal reçu soit en mesurant le décalage en temps sur les codes, soit la différence de phases sur les ondes porteuses.
Les mesures sur les codes donnent directement la distance satellite - récepteur en connaissant la durée de propagation du signal émis par le satellite jusqu’à son arrivée à un récepteur sur la terre.
16.5 Les Equations Fondamentales d’Observations
16.5.1. L’Equation d’Observations en Pseudo-Distances
La mesure de la pseudo-distance est l’observation GPS de base pour tout récepteur. Elle utilise les codes C/A et P. La mesure enregistre le temps apparent mis par le signal pour arriver du satellite au récepteur :
[TABLE]
où désigne le temps vrai et :
[TABLE]
la différence entre les corrections aux temps du récepteur et du satellite. L’intervalle ci-dessus est multiplié par la vitesse de la lumière pour avoir une distance :
[TABLE]
Si la position du satellite est représentée par le vecteur r et celle du récepteur par R, la vraie distance peut être calculée à partir de :
[TABLE]
Si l’erreur sur l’orbite du satellite est notée par et si on prend compte des retards dûs au passage du signal dans la troposphère et l’ionosphère, alors la pseudo-distance peut être calculée par l’équation:
[TABLE]
16.5.2. L’Equation d’Observation de Phases
Notons la phase de l’onde reçue avec la fréquence et la phase générée par le récepteur avec la fréquence . Ici le temps est une époque dans le temps compté à partir d’un instant initial , alors on peut écrire que:
[TABLE]
Les phases initiales et sont causées par les erreurs des horloges du satellite et du récepteur et elles sont égales à:
[TABLE]
Par suite, la phase de battement est égale à :
[TABLE]
Comme les fréquences et sont presque les mêmes, l’équation (16.2) peut s’écrire :
[TABLE]
avec .
A l’époque , la phase de battement est :
[TABLE]
où désigne le nombre de cycles entre le satellite et le récepteur. est appelé aussi ambiguïté entière. Tant que le récepteur reçoit le signal du satellite, reste le même et est la fraction de phase mesurée depuis le début de la réception du signal.
On pose :
[TABLE]
Alors l’équation (16.5) devient:
[TABLE]
En introduisant la longueur d’onde , l’équation (16.6) devient :
[TABLE]
L’équation (16.7) représente l’équation d’observations de phases. désigne la distance entre le récepteur et le satellite. La phase peut être mesurée mieux que 0.01 cycles ce qui correspond à une précision millimétrique. En effet, de (16.7), on peut écrire que:
[TABLE]
où on a considéré que la longueur d’onde .
16.5.3. Le Référentiel
Le GPS fournit les coordonnées géodésiques (,,) dans le système géocentrique (World Geodetic System 84) ().
Il est défini par :
-
l’origine : centre des masses de la Terre;
-
l’axe : parallèle à la direction de l’origine vers le Pôle Conventionnel Terrestre (PCT);
-
l’axe : le plan est parallèle au méridien de longitude zéro défini par le Bureau International de l’Heure (BIH);
-
l’axe : dans l’équateur du PCT et perpendiculaire au plan dans le sens direct.
Au référentiel , on associe l’ellipsoïde dont les paramètres sont :
-
le demi-grand axe : ;
-
l’aplatissement .
Au lieu d’utiliser l’ellipsoïde , on utilise l’ellipsoïde adopté par l’Association Internationale de Géodésie (AIG) ayant le même demi-grand axe que le et un aplatissement de .
16.5.4. Les Coefficients de précision des dispositions des satellites GPS
Comme en levés topographiques classiques où le géomètre opère des observations, le cas d’un relèvement, en visant des points connus bien disposés, les observations convenablement exécutées des observations GPS obéissent à cette règle.
En effet, on définit les coefficients de précision relatifs à la disposition des différents satellites par rapport au point de l’observation. Ces coefficients permettent de donner à l’opérateur le choix de la période des observations où les satellites GPS sont bien disposés dans le ciel de façon à obtenir des précisions meilleures. Ces coefficients sont notés comme suit:
[TABLE]
Comment sont calculés ou estimés ces coefficients?
A partir des équations fondamentales d’observations GPS (16.1) ou (16.7), on arrive au système suivant, pour les observations GPS en un point de coordonnées approchées tridimensionnelles ou géodésiques :
[TABLE]
où:
-
le vecteur des corrections à la position approchée et la correction du temps;
-
la matrice des coefficients;
-
le vecteur des observations;
-
et le vecteur des résidus.
La solution de (16.10) par la méthode des moindres carrés (voir (19.83)) est donnée par :
[TABLE]
La matrice , qu’on appelle la matrice de variance des inconnues, s’écrit sous la forme:
[TABLE]
D’où les expressions de :
[TABLE]
Ces coefficients sont définis car la matrice est définie positive. Pour donner les expressions de et , on doit se ramener au repère local du point .
16.5.4.1. Le Repère local
Soit un point relatif à un ellipsoïde de révolution associé à un référentiel géocentrique donné .
On considère le repère orthonormé local en A défini dans la base orthonormée de (Fig. LABEL:fig:normale1a) par:
[TABLE]
Matriciellement, on peut écrire (16.14) sous la forme:
[TABLE]
avec la matrice:
[TABLE]
Soit un vecteur de composantes et respectivement par rapport aux bases et , on a alors la relation:
[TABLE]
ou encore:
[TABLE]
Or d’après la formule (19.92), la matrice de variance de s’écrit:
[TABLE]
16.5.4.2. Calcul de et
Pour calculer et , on exprime la matrice extraite de la matrice donnée par (16.12) soit:
[TABLE]
On calcule alors la matrice transformée de par (16.17), d’où:
[TABLE]
Par suite:
[TABLE]
Là aussi, les coefficients et sont définis car la matrice est aussi définie positive.
16.6 Les Différents types de Positionnement Par GPS
16.6.1. Le Positionnement Absolu
Le positionnement absolu d’un point est le processus de collection de données à partir de plusieurs satellites en un endroit donné, constamment avec une éphéméride, pour déterminer la position d’une station indépendante.
L’utilisateur muni d’un récepteur mesure la distance entre sa station et plusieurs satellites à l’aide du code C/A ou P. L’intérêt de cette méthode est l’obtention d’une position instantanée en temps réel.
-
Précision : - 8 mètres avec le code C/A et S/A inactivé (théoriquement);
-
40 mètres avec le code C/A et S/A activé;
-
8 mètres avec le code P.
-
Les besoins :
-
4 heures d’observations par session;
-
2 à 3 sessions par emplacement;
-
avec un récepteur bi-fréquence (L1/L2);
-
éphémérides précises;
-
un logiciel de traitement.
16.6.2. Le Positionnement Relatif
C’est un processus de collection de données simultanément en deux ou plusieurs stations, à partir d’au moins quatre satellites, pour déterminer les positions des points relativement à d’autres points connus. Le positionnement des points est relatif d’un point à un autre.
La distance est calculée soit à partir du code P ou C/A, soit à partir de mesures de phases. Ce positionnement permet de diminuer l’influence des erreurs d’orbites, des corrections de propagation, des décalages des horloges satellites et récepteurs.
Le positionnement peut être statique ou dynamique (en général un poste fixe, un mobile). Le temps réel peut être réalisé par ajout d’un équipement de transmission radio qui permet à un poste d’envoyer ses observations à l’autre qui peut alors calculer la position et la vitesse du mobile.
Le champ d’utilisation est vaste allant de la navigation à l’établissement de réseaux de précision (géodésie, topographie,…etc).
Procédures :
-
double différence (deux satellites), les stations observent les satellites simultanément à un instant .
-
triple différence (double différence), les stations observent les satellites à un instant puis à un instant .
Précision :
-
observations en mode statique 2 à ;
-
observations en mode cinématique 2 à .
16.6.3. La Navigation Différentielle DGPS
La navigation différentielle ou le GPS différentiel (DGPS) consiste à faire des observations de pseudo distances en plusieurs stations simultanément.
Le premier type d’application du DGPS est dynamique, c’est à dire une station fixe appelée station de référence et l’autre est mobile. La station fixe dont les coordonnées sont connues envoie, à l’aide d’un équipement radio (UHF, VHF, HF, MF), des corrections à la station mobile qui calcule alors sa position. Ce type de positionnement est très utilisé en navigation maritime à l’approche des côtes ainsi que pour l’hydrographie. Le deuxième type d’application est statique et profite de la bonne précision du DGPS pour l’établissement de réseaux de points dont la précision n’a pas besoin d’être meilleure qu’un mètre.
16.6.4. Le Mode Statique Absolu
Le statique est le mode le plus utilisé par la technique GPS pour l’établissement de canevas ou réseaux en géodésie, topométrie et photogrammétrie. Il s’agit d’observer sur chaque station les phases sur au moins 4 satellites, le résultat est un positionnement relatif, c’est-à-dire un positionnement par rapport à une station de référence en connaissant . Le temps d’observations doit être suffisant pour résoudre les ambiguïtés et dépend de la longueur de la ligne de base, de la géométrie de la constellation des satellites et des conditions atmosphériques. Par expérience, la durée d’observations est d’au moins une heure pour des lignes de bases courtes (15 km) et elle est de plusieurs heures pour les lignes de longues bases.
La précision dépend du type de récepteurs (mono ou bi-fréquence), du nombre de récepteurs et du type d’orbites utilisées :
- GPS statique mono fréquence :
-
mesures de phases sur L1;
-
durée d’observations : une heure;
-
distances jusqu’à 20 km en zone tempérée, 10 km en zone équatoriale;
-
orbites radio- diffusées;
-
précision : ;
où représente la distance entre les points.
- GPS statique bi-fréquence :
-
mesures de phases sur L1 et L2;
-
durée d’observations : de 1 à 4 heures;
-
distances : jusqu’à 300 km;
-
orbite radio diffusée;
-
précision : .
- GPS statique ultra précis :
-
mesures de phases sur L1 et L2;
-
durée d’observations : de 1 à plusieurs jours;
-
distances de l’ordre de 5000 km;
-
calcul par traitement semi-dynamique ou avec orbites précises;
-
précision : à .
16.6.5. La Statique Rapide
On choisit une station de référence sur laquelle un récepteur mesure en continu, tandis que des récepteurs mobiles se déplacent sur les autres stations en observant quelques minutes sur chacune d’elles.
Cette technique très productive convient aux petits réseaux pour le cadastre, la topométrie, la densification de réseaux géodésiques et l’équipement photogrammétrique.
16.6.6. La Réoccupation ou pseudo-cinématique
La réoccupation est une autre variante du statique. Le principe des calculs est de grouper toutes les observations faites sur un site, lorsque le site est stationné plusieurs fois. Si on observe trois satellites à la première occupation, et trois satellites à la deuxième occupation, le logiciel fera comme si six satellites avaient été observés.
16.6.7. Le Mode Opératoire
Le récepteur de référence (base) est stationné sur un point connu, il collecte les données, calcule la correction de ’pseudo-range’ en se référant à sa position connue et envoie ces corrections aux utilisateurs (itinérants). Les récepteurs de terrain reçoivent ces corrections et les utilisent pour corriger leurs positions relativement à la position connue de la station de référence.
16.7 Les Applications du GPS
Les applications du système GPS sont multiples:
-
canevas de détails;
-
navigation de précision;
-
levés hydrographiques de grande précision;
-
contrôle d’altitudes (plan d’eau, marée,…);
-
relevés de type sismique;
-
surveillance de position et de mouvement (micro-géodésie);
-
levés de détails, cadastre et topographie;
-
implantation;
-
localisation des points;
-
mines, prospection;
-
stéréo-préparation.
16.7.1. Les Avantages de système GPS
Les avantages de système GPS sont :
-
précision centimétrique;
-
indépendance des conditions atmosphériques;
-
nécessite un seul opérateur;
-
productivité active;
-
résultats exploitables en divers domaines:
-
photogrammétrie;
-
système d’information géographique (SIG);
-
génie civil (collection des eaux usées, drainage);
- résultats en coordonnées et locales.
16.8 Almanach
L’almanach est l’ensemble de paramètres radiodiffusés par chaque satellite GPS, permettant d’estimer la trajectoire et le comportement des horloges du satellite. Il est utilisé pour des prévisions à moyen terme.
Il est intéressant de regarder le nombre de satellites et le précédemment défini avant de faire des observations pour éviter les périodes défavorables ( > 4, > 3).
La détermination des almanachs nécessite une observation d’environ deux heures pour les récupérer en leur totalité, et un logiciel de traitement. L’almanach peut être valable pour l’observation des autres zones mais dans un délai ne dépassant pas les 60 jours.
Pour obtenir des résultats propres à chaque zone d’études, on doit fixer sa latitude, sa longitude et son altitude ainsi que la date du jour de l’observation.
Les produits sont les graphiques:
-
de la visibilité des satellites;
-
des coefficients et ;
-
de la configuration des satellites.
Chapter 17 Bibliographie I
F.R. Helmert. 1884. Die Mathematischen und Physikalischen Theorien der Höheren Geodäsie; Vol 2, Leibzig, B.G Teubner(reprinted 1962). 2. 2.
H. Poincaré. 1905. Sur les Lignes géodésiques des surfaces convexes. Transactions of the American Mathematical Society. n°6, pp. 237-274; Œuvres 6, pp. 38-84. 3. 3.
F. Tisserand & H. Andoyer. 1912. Leçons de Cosmographie. 6ème édition. Librairie Armand Colin. 396p. 4. 4.
G. Julia. 1955. Cours de l’Ecole Polytechnique. Cours de Géométrie Infinitésimale. Cinquième Fascicule, Deuxième Partie: Théorie des Surfaces. Deuxième édition entièrement refondue. Editeur Gauthier-Villars. 141p. 5. 5.
W.A. Heiskanen & H. Moritz. 1967. Physical Geodesy. Freeman, San Francisco. Reprint, 1979. Institute of Physical Geodesy, Technical University, Graz, Austria. 364p. 6. 6.
J. Dieudonné. 1968. Calcul Infinitésimal. 1ère édition. Collection Les Méthodes. Hermann, Paris. 479p. 7. 7.
A. Fontaine. 1969. Rapport sur la Géodésie de la Tunisie. OTC. 8. 8.
C.A.C.G.G. (le Comité Associé Canadien de Géodésie et de Géophysique). 1973. Canadian Surveyor, Vol 27, n°3. 9. 9.
A. Marussi. 1974. Africa and Modern Geodesy. Proceedings of the First Symposium in Geodesy in Africa, 14-19 January. Khartoum. Soudan. 10. 10.
B. Morando. 1974. Mouvement d’un Satellite Artificiel de la Terre. Gordon & Breach, Paris, London et New York. 255p. 11. 11.
L. Bers. 1977. Quasiconformal mappings, with applications to differential equations, function theory and topology. Bulletin of the American Mathematical Society, vol 83, n°6, pp. 1083-1100, 1977. 12. 12.
C. Fezzani. 1979. Analyse de la structure des réseaux astro-géodésiques tunisiens. Thèse de Docteur Ingénieur. Ecole Nationale des Sciences Géographiques. IGN France. 314p. 13. 13.
C. Boucher. 1979a. Systèmes géodésiques de référence et autres problèmes géodésiques liés à la localisation en mer. Colloque national sur la localisation en mer. Brest, 1-5 octobre 1979. IGN France. 14. 14.
C. Boucher. 1979b. Les Transformations géométriques entre systèmes géodésiques. Rapport Technique RT/G n°3, SGNM, IGN France. 15. 15.
P. Dombrowski. 1979. 150 Years after Gauss " disquisitiones generales circa superficies curvas". Astérisque n°62. Publication de la Société Mathématique de France. 153p. 16. 16.
H.M. Dufour. 1979. Systèmes de références: Systèmes Projectifs. Conférence présentée au Colloque national sur la Localisation en mer. Brest, 1-5 octobre 1979. 27p. 17. 17.
H. Monge. 1979. L’Ellipsoïde de Clarke 1880. Bulletin d’Information de l’IGN France n°39-1979/3, pp. 37-38. 18. 18.
J. Lemenestrel. 1980. Cours de Géodésie Elémentaire, ENSG, IGN France. 19. 19.
J. Commiot. 1980. Cours de Cartographie Mathématique, ENSG, IGN France. 20. 20.
A. Danjon. 1980. Astronomie Générale: Astronomie sphérique et Eléments de mécanique céleste. Seconde édition, revue et corrigée. Librairie Scientifique et Technique Albert Blanchard. 454p. 21. 21.
B. Doubrovine, S. Novikov et A. Fomenko. 1982. Géométrie Contemporaine: Méthodes et Application. Première Partie: Géométrie des surfaces, des groupes de transformations et des champs. Edition Mir, Moscou. 438p. 22. 22.
M. Charfi. 1983. Les Travaux de revalorisation de la Géodésie Tunisienne. OTC. 23. 23.
P. Vaniek & E.J. Krakiwsky. 1986. Geodesy: the Concepts. North Holland Compagny. 2ème Edition. 697p. 24. 24.
Defense Mapping Agency(DMA). 1987a. DMA Technical Report 8350.2. Dept of Defense, World Geodetic System 1984, Its definition and relationships with local geodetic systems. 121p. 25. 25.
Defense Mapping Agency. 1987b. DMA Technical Report 8350.2-A. Part I: Methods, Techniques, and Data used in WGS84 development. Supplement to Department of Defense World Geodetic System 1984 Technical Report. 412p. 26. 26.
Defense Mapping Agency. 1987c. DMA Technical Report 8350.2-A. Part II: Parameters, formulas, and graphics for the practical application of WGS84. Supplement to Department of Defense World Geodetic System 1984 Technical Report. 775p. 27. 27.
H. Moritz & I.I. Mueller. 1988. Earth Rotation :Theory and Observation. Ungar Publishing Compagny. New York. 617p. 28. 28.
B. Hofmann-Wellenhof, H. Lichtenegger et J. Collins. 1992. Global Positioning System, Theory and Practice. Springer-Verlag Wien New York. 382p. 29. 29.
M. Bura & K. P. 1993. Gravity Field and Dynamics of the Earth. Springer-Verlag. 385p. 30. 30.
Publications de l’Académie Bavaroise de Géodésie, n°58. 1997. Symposium de la Commission EUREF, Sofia, 4-7 juin 1997. Extrait du rapport présenté par la Suisse. pp. 212-218. 31. 31.
T. Soler. 1998. A Compendium of transformation formulas useful in GPS work. Journal of Geodesy, Vol.72, n°7/8, pp. 482-490. 32. 32.
E.W. Grafarend. 1998. Helmut Wolf: Das Wissenschaftliche Werk/ The Scientific Work. Publication de la Deutsche Geodätische Kommission bei der Bayerischen Akademie der Wissenschaften, Reihe A, Heft n°115, München 1998. 97p. 33. 33.
P. Petersen. 1998. Riemannian Geometry. Graduate Texts in Mathematics, n°171. Springer-Verlag. 435p. 34. 34.
A. Ben Hadj Salem. 1999. La Mise à niveau de la Géodésie Tunisienne par l’unification Carthage2000 de ses réseaux, présentée au Premier Atelier Maghrébin de Géodésie. Tunis, 18-20 mai 2000. Publiée dans la revue Géo-Top de l’OTC numéro spécial mai 2000, pp. 6-16. 35. 35.
A. Ben Hadj Salem. 1999. Note sur les comparaisons des azimuts géodésiques du réseau géodésique primordial Tunisien. 5p. 36. 36.
H. Moritz. 2000. Geodetic Reference System 1980. Journal of Geodesy, vol. 74 n°1, pp. 128-134. 37. 37.
A. Ben Hadj Salem. 2001. Contrôle de l’azimut d’orientation du système géodésique tunisien Carthage34. Publié dans la revue Géo-Top de l’OTC, n°4 février 2002, pp. 63-68. 38. 38.
H.A. Kastrup. 2008. On the Advancements of Conformal Transformations and their Associated Symmetries in Geometry and Theoretical Physics. arxiv:http://arxiv.org/physics.hist-ph/0808.2730v1. www.arxiv.org. 82p. 39. 39.
Arrêté du ministre de la Défense nationale du 10 février 2009. 2009. Journal Officiel de la République Tunisienne n°14 du 17 février 2009. 40. 40.
A.N. Pressley. 2010. Elementary Differential Geometry. Springer-Verlag Heidelberg. 395p. 41. 41.
M. Lemmens. 2011. Geo-information: Technologies, Applications and the Environment. Series Geotechnologies and the Environment. Volume 5. Springer Netherlands. 349p. 42. 42.
E. Zeidler. 2011. Quantum Field Theory III: Gauge Theory A Bridge between Mathematicians and Physicists. Springer-Verlag Heidelberg. 1158p. 43. 43.
A. Ben Hadj Salem. 2012. Selected Papers. Tome II. pp 165-172. 44. 44.
A. Ben Hadj Salem. 2013. Histoire de la Topographie en Tunisie : Les Coordonnées Origines Fuseaux. 11p. 45. 45.
United Nations Commitee of Experts on Global Geospatial Information Management (UN-GGIM). 2015. La Résolution adoptée par l’Assemblée générale le 26 février 2015. www.ggim.un.org/docs/A_RES_69_266_F.pdf. 3p.
Part II Eléments de la Théorie des Moindres Carrés
Chapter 18 **Eléments Mathématiques pour La Méthode des Moindres Carrés **
Dans ce chapitre, on présente les théorèmes mathématiques relatifs à l’application de la théorie des moindres carrés.
18.1 Définitions
Définition 18.1
Soient et deux espaces vectoriels normés de dimension finie, et une application de dans . est dérivable en s’il existe une application linéaire de dans qui vérifie:
[TABLE]
ou:
[TABLE]
On note :
[TABLE]
l’espace vectoriel des applications linéaires de dans .
Si est dérivable en , on pose:
[TABLE]
est une application linéaire de dans , donc qui est isomorphe à l’espace vectoriel des applications bilinéaires de dans , c’est-à-dire des applications telles que:
[TABLE]
est une application bilinéaire symétrique si:
[TABLE]
18.1.1. Composition des dérivées premières
Définition 18.2
Soient et trois espaces vectoriels normés de dimension finie, et une application de dans dérivable en et une application de dans dérivable en ; alors est dérivable en et :
[TABLE]
18.2 Condition nécessaire d’extremum local
Théorème 18.1
Si une fonction d’un espace vectoriel normé dans admet un extremum local en un point où elle est dérivable, alors:
[TABLE]
Démonstration: Soit un intervalle ouvert contenant 0. On définit la fonction , on a alors . En particulier .
Si est un minimum relatif, soit:
[TABLE]
car est dérivable en ou encore est dérivable en , on a donc:
[TABLE]
18.3 Formulation du problème des Moindres Carrés - le Cas Linéaire
Soient une matrice (m,n) réelle de rang et un vecteur de . On cherche un vecteur de tel que:
[TABLE]
C’est-à-dire approchant au mieux la solution du système:
[TABLE]
Si l’on pose:
[TABLE]
est appelé vecteur résidu. On cherche donc un vecteur qui minimise ou c’est-à-dire qui minimise la somme des carrés des résidus d’où le terme " est solution des moindres carrés (Least-Squares Solution)" .
Pour cela, on introduit la forme quadratique définie par:
[TABLE]
avec un vecteur de . est donc une application de . On introduit un produit scalaire:
[TABLE]
D’où la norme du vecteur :
[TABLE]
dans l’espace vectoriel .
Développons l’équation (18.14), on obtient:
[TABLE]
Le problème consiste à minimiser sur , donc chercher un minimum absolu ( et non pas seulement relatif). On a établi une condition nécessaire de minimum relatif: . La recherche de la solution complète fait appel aux propriétés des fonctions convexes.
18.4.1. Calcul des dérivées première et seconde de
On commence par le calcul de . D’où:
[TABLE]
Par suite, en posant:
[TABLE]
Alors:
[TABLE]
Or l’équation précédente (18.21) s’écrit:
[TABLE]
Or en posant :
[TABLE]
Il est immédiat que est une application linéaire de dans qui à associe le réel . D’après la définition 18.1, on a donc:
[TABLE]
Il s’ensuit que:
[TABLE]
Théorème 18.2
(de Taylor111Brook Taylor (1685-1731): mathématicien anglais.-Young222William Henry Young (1863-1942): mathématicien anglais.) Soit une fonction de dans . Si est dérivable en , alors:
[TABLE]
Si est deux fois dérivable en , alors:
[TABLE]
Théorème 18.3
(de Taylor-Maclaurin333Colin Maclaurin (1698-1746): mathématicien écossais.) Soit une fonction de dans . Si est dérivable en , alors:
[TABLE]
Si est deux fois dérivable sur , alors:
[TABLE]
18.4 Convexité
Définition 18.3
Une partie de est convexe si:
[TABLE]
Définition 18.4
Une fonction : convexe est convexe si:
[TABLE]
Théorème 18.4
(Condition nécéssaire de minimum relatif sur un ensemble convexe) Soient : ouvert et convexe . Si est dérivable en et si elle admet en un minimum relatif par rapport à , alors:
[TABLE]
Démonstration: Soient et . est convexe . d’après la formule de Taylor-Young, soit : , .
minimum relatif dès que est suffisamment petit. D’où:
[TABLE]
Théorème 18.5
(Convexité et dérivabilité première) Soient : ouvert , dérivable dans et convexe . La fonction est convexe si et seulement si:
[TABLE]
Démonstration: Soient .
[TABLE]
[TABLE]
Soit
[TABLE]
C’est l’équation (18.33).
Reciproquement: on a:
[TABLE]
On peut écrire:
[TABLE]
En utilisant que est une application linéaire, on a:
[TABLE]
En multipliant la première équation par et la deuxième par et faisant la somme on obtient:
[TABLE]
Théorème 18.6
(Convexité et dérivabilité seconde) Soient : ouvert , deux fois dérivable dans et convexe . La fonction est convexe sur si et seulement si:
[TABLE]
Démonstration: La formule de Taylor-Mac Laurin s’écrit:
[TABLE]
En l’appliquant à et , on obtient:
[TABLE]
Si convexe, on a : , soit , il vient:
[TABLE]
Si , alors donc est convexe d’après le théorème 18.5 ’convexité et dérivabilité première’.
Reciproquement: Soit , on a alors:
[TABLE]
car f est convexe, donc admet un minimum sur en . On a:
[TABLE]
La formule de Taylor-Young s’écrit:
[TABLE]
s’écrit pour avec d’où pour :
[TABLE]
Comme admet un minimum en , on a alors:
[TABLE]
comme et pour suffisamment petit, on a donc:
[TABLE]
Théorème 18.7
(Convexité, dérivabilité première et minimum global) Soient convexe et une fonction convexe de dans .
1. Si admet un minimum relatif en un point de , elle y admet un minimum global.
2. Si est définie sur un ouvert contenant et dérivable en , alors admet en un minimum global sur si et seulement si:
[TABLE]
3. Si est ouvert, la condition précédente équivaut à .
Démonstration
- Soient et . est convexe .
minimum relatif .
- La condition est nécessaire (minimum relatif sur un convexe). Reciproquement: soit convexe sur convexe, dérivable en , telle que .
convexe (convexité et dérivabilité première) donc est un minimum.
- .
Reciproquement: ouvert, boule ouverte de contenant tel que :
[TABLE]
18.5 Application au problème des moindres carrés
On a:
[TABLE]
car est une matrice symétrique définie positive. Donc:
[TABLE]
D’après le théorème 18.7 ’convexité, dérivabilité première et minimum global’, la recherche du minimum de coïncide alors avec l’ensemble des solutions de l’équation . Soit:
[TABLE]
D’où respectivement la solution des moindres carrés et le vecteur résidu:
[TABLE]
18.6 Exercices et Problèmes
Exercice 18.1
Soient un ouvert convexe d’un espace de Banach444Stefan Banach (1892-1945): mathématicien polonais. réel c’est-à-dire un espace vectoriel normé complet sur et une fonction à valeurs réelles, différentiable et convexe dans . Montrer que si en un point , alors a un minimum absolu en .
Exercice 18.2
Montrer que dans un espace de Banach réel , la fonction est strictement convexe, c’est-à-dire, pour tout couple .
Aide: utiliser l’identité remarquable:
[TABLE]
Exercice 18.3
On note une surface de définie par la représentation paramétrique:
[TABLE]
où et sont deux paramètres réels. On se donne un point .
1. Donner une condition géométrique portant sur le plan tangent à au point pour que la différentielle de la fonction soit nulle en .
Problème 18.1
Soient un ouvert convexe d’un espace de Banach réel et une application différentielle de dans .
1. Montrer que est convexe dans si et seulement si:
[TABLE]
pour tout couple de points .
2. On suppose et de classe soit deux fois différentiable et continue; pour , soit la forme quadratique définie par :
[TABLE]
Montrer que est convexe dans si et seulement si est positive pour tout soit pour et .
Chapter 19 Eléments de la Méthode des Moindres Carrés
19.1 Introduction
19.1.1. Définition du Problème
On veut déterminer grandeurs scalaires inconnues à l’aide de grandeurs observées distinctes ou non des précédentes mais qui leur sont liées géométriquement. Les grandeurs peuvent être des coordonnées de points, des altitudes ou des constantes d’orientation.
On dispose de mesures ou observations: . Le nombre des mesures est généralement surabondant par rapport au nombre des inconnues à déterminer. Le but est de faire la compensation ou ajustement des mesures (en anglais : adjustment) et d’estimer au mieux les inconnues.
Les grandeurs à déterminer peuvent être ou non liées entre elles; s’il y’a relations entre les grandeurs, on dit que le nombre de degrés de liberté de l’ensemble est . Par suite, il y aura à déterminer inconuues . Si le nombre des observations est supérieur à , c’est une condition nécessaire pour déterminer les inconnues, mais elle n’est pas suffisante. Il faut trouver parmi les observations un groupe de mesures qui permet de calculer les inconnues.
19.2 Les Mesures
Les mesures écrites sous forme matricielle:
[TABLE]
- peuvent être directes, dans ce cas, indépendantes, outre leur valeur, on connaît leur exactitude donnée par leur moyenne quadratique , dans ce cas, la matrice variance du vecteur l est alors diagonale.
[TABLE]
et les loi normale , où désigne la valeur réelle inconnue avec .
- peuvent être indirectes, alors en général corrélées donc la matrice n’est pas diagonale:
[TABLE]
Le vecteur sera considéré comme normal et sa densité de probabilité sera la fonction:
[TABLE]
où Dét désigne le déterminant de la matrice . Quand est une variable scalaire, le graphique de est donné par la courbe de Gauss (Fig. 19.1).
Le but qu’on se propose est alors:
- d’estimer au mieux à partir de la donnée de mesures la valeur des grandeurs inconnues.
On appelle :
[TABLE]
le vecteur des estimateurs correspondants.
- de trouver le meilleur estimateur de la matrice variance de qui chiffrera la précision de et d’évaluer l’exactitude de .
19.3 Poids - Matrice de Poids - Variance de la Mesure de Poids Unitaire
Deux cas se posent:
-
on connaît : mesures directes et indépendantes;
-
on connaît à un facteur près que la théorie permettra de déterminer.
On pose alors:
[TABLE]
avec:
-
matrice de poids (fixée avant les calculs);
-
variance unitaire scalaire inconnue à déterminer.
La matrice des poids doit être choisie comme inversement proportionnelle à la matrice variance des erreurs de mesures. En effet de (19.6), on a:
[TABLE]
En particulier, si les mesures sont indépendantes, les poids doivent être choisis comme inversement proportionnels aux carrés des erreurs moyennes quadratiques.
Généralement si est connue, alors , donc on considère que . Dans le cas de mesures directes, la matrice est diagonale avec:
[TABLE]
Une comparaison de la variance unitaire a priori et la valeur estimée permettra de déceler les incohérences dans les données relatives à l’exactitude des mesures.
19.4 Modèles Fonctionnel et Stochastique
Ces modèles décrivent les phénomènes physiques.
19.4.1. Le Modèle Fonctionnel
Le modèle fonctionnel décrit la relation entre les observables, les paramètres et les relations à utiliser. Qu’est-ce qu’il faut choisir comme modèle fonctionnel pour décrire un phénomène physique?
Hypothèse: à une grandeur, on peut associer sa valeur maximale vraie. Soit:
[TABLE]
Soit le vecteur des valeurs nominales des observables. S’il y a relations indépendantes données par l’expérience, alors est appelé le nombre de degrés de liberté du modèle fonctionnel.
Exemple 1: déterminer les angles d’un triangle plan. On a:
[TABLE]
Donc .
Exemple 2: déterminer un côté d’un triangle. On a 4 observations (3 angles et un côté) et une relation indépendante (la somme des angles d’un triangle plan vaut ) d’où .
Exemple 3: déterminer les 3 angles et les 3 côtés d’un triangle plan. On a 3 relations indépendantes:
[TABLE]
Le vecteur des observables est:
[TABLE]
La détermination de l’équation (19.9) se fait par la méthode des équations de condition c’est-à-dire que le vecteur vérifie:
[TABLE]
avec relations indépendantes et une certaine fonction.
19.4.2. La Méthode des Equations d’observations
Avec cette méthode, on décrit le modèle fonctionnel par des paramètres commodes. Soit le vecteur des paramètres avec où est le degré de liberté du modèle. On cherche alors à exprimer les observables en fonction des paramètres du modèle, soit:
[TABLE]
Les équations d’observations sont si :
[TABLE]
L’équation (19.13) représente les relations indépendantes dites équations de condition.
Exemple: Détermination des coordonnées des sommets d’un triangle plan à partir de l’observation des trois angles aux sommets . On choisit comme paramètres donc s’écrit:
[TABLE]
Les observables sont les angles , on a alors:
[TABLE]
et :
[TABLE]
Les équations de condition sont quatre à savoir:
[TABLE]
Il reste à déterminer . Comme , on a degrés de liberté. Alors:
[TABLE]
On laisse à titre d’exercice la détermination de la fonctionnelle .
19.4.3. Le Modèle Stochastique
C’est le modèle qui décrit les lois qui réagissent les erreurs des mesures des observables.
Définition 19.1
On appelle erreur la quantité telle que:
[TABLE]
et correction la quantité .
Donc . On corrige la valeur observée pour avoir la valeur réelle.
On utilise un modèle des erreurs centrées avec une variance. En répétant les mesures, les erreurs de ces mesures sont la réalisation d’une variable aléatoire centrée . Soit: . On a alors:
[TABLE]
Le vecteur erreur est:
[TABLE]
La matrice variance est définie par:
[TABLE]
C’est une matrice symétrique et elle est positive c’est-à-dire:
[TABLE]
où est un vecteur à composantes. En effet:
[TABLE]
Or et , par suite:
[TABLE]
Si on pose , on a . est positive et on démontre que les valeurs propres de sont positives et qu’on peut écrire sous la forme:
[TABLE]
avec une matrice orthogonale normale c’est-à-dire : . Alors:
[TABLE]
En multipliant les mesures, on a un accroissement mécanique de la précision. Seulement la première hypothèse est très fragile: le centrage des erreurs est-il toujours vérifié ?
Les erreurs systématiques subsistent encore vue l’insuffisance de définition des valeurs nominales ainsi que les erreurs dues aux instruments. Ces effets montrent les limites de la méthode des moindres carrés.
Le modèle des erreurs des mesures est la loi normale centrée, c’est-à-dire que où est la matrice écart-type. En utilisant le modèle stochastique avec :
[TABLE]
et soit la ième équation d’observation:
[TABLE]
La règle qu’il faut utiliser c’est qu’il faut diviser chaque équation par l’écart-type correspondant:
[TABLE]
On obtient les estimations optimales, soit petit, l’observation est précise et le poids est grand.
19.5 Présentation de la Méthode des Equations d’Observations
Pour la méthode des équations d’observations, on a :
[TABLE]
On pose:
[TABLE]
En développant l’équation (19.28), on obtient:
[TABLE]
On appelle :
[TABLE]
est une matrice où est le nombre des relations d’observations et le nombre des paramètres inconnus. On obtient alors:
[TABLE]
On substitue à l’équation précédente l’équation:
[TABLE]
sachant que quand et . On utilise une procédure d’itération en prenant une valeur estimée de l’inconnue.
Exemple: Observation d’une distance entre deux points 1 et 2. On a les notations suivantes:
[TABLE]
A partir de (19.34), on a:
[TABLE]
Soit:
[TABLE]
L’équation (19.36) représente l’équation d’observation d’une distance. On montre de même que l’équation d’un tour d’horizon s’écrit sous la forme:
[TABLE]
19.6 La Solution des Moindres Carrés
Le système (19.33) s’écrit en prenant en compte de la matrice des poids :
[TABLE]
La solution du système précédent vient en minimisant en norme euclidienne l’expression ou encore:
[TABLE]
On obtient:
[TABLE]
Si le minimum existe, est solution si:
[TABLE]
est symétrique, régulière et inversible car elle est carrée de rang . Donc la solution des moindres carrés est:
[TABLE]
Les observations compensées:
[TABLE]
19.7 Propriétés des Estimateurs
Propriété 19.1 L’estimateur des moindres carrés est centré et sans biais c’est-à-dire:
[TABLE]
Ainsi à des jeux différents d’observations, on fait correspondre des valeurs différentes dont on peut estimer l’espérance mathématique ou moyenne. Cet estimateur est un vecteur aléatoire. Comme:
[TABLE]
alors:
[TABLE]
Soit:
[TABLE]
Parmi les estimateurs sans biais qui est le plus précis est (celui dont l’écart-type est le plus petit), soit:
[TABLE]
est le plus précis pour chaque composante. On obtient l’estimation la plus précise (la matrice est minimale). On détermine cette matrice:
[TABLE]
Or:
[TABLE]
Par suite:
[TABLE]
[TABLE]
car avec un facteur scalaire.
Un estimateur est défini en fonction d’un échantillon aléatoire, soit:
[TABLE]
est proche de . On cherche les estimateurs sans biais, c’est-à-dire:
[TABLE]
Exemple: soient une quantité et les observables indépendants d’une même variable aléatoire de , alors un estimateur de est donné par:
[TABLE]
Alors cet estimateur est symétrique, sans biais (les erreurs de mesures sont centrées), de précision maximale parmi les estimateurs linéaires et sans biais, estimateur des moindres carrés et asymptotiquement normal (si ), la fonction de répartion de comme variable aléatoire converge uniformément vers une fonction de répartition de la loi normale.
19.8 Les Résidus
Le vecteur résidu est défini par:
[TABLE]
Pourquoi calculer les résidus :
1- Les composantes de sont de l’ordre des erreurs de mesures. La redondance des mesures est donnée par , avec taux de redondance est égale à . L’accroissement des mesures implique la précision mais ce n’est pas toujours vrai.
2- Possibilité de vérifier la normalisation de la résolution:
[TABLE]
On a en effet:
[TABLE]
Soit une solution, .
19.8.1. Expression du vecteur résidu
Le vecteur résidu s’exprime par:
[TABLE]
où est une matrice singulière (non inversible). Utilisant l’équation (19.47), s’écrit:
[TABLE]
Comme , d’où la variance des observations compensées:
[TABLE]
Utilisant l’équation (19.54), on obtient :
[TABLE]
19.9 La Variance des Mesures
Par définition, la variance des mesures est :
[TABLE]
or:
[TABLE]
Par suite:
[TABLE]
Soit:
[TABLE]
Pour une variable centrée, on a :
[TABLE]
Comme:
[TABLE]
et:
[TABLE]
Donc:
[TABLE]
Alors, l’estimateur est biaisé. Si on adopte comme formule de l’estimateur de la variance:
[TABLE]
on obtient:
[TABLE]
(A vérifier à titre d’exercice!). De même, pour:
[TABLE]
19.10 La matrice d’Information de Fisher
Définition 19.2
On appelle matrice d’information de Fisher111Sir Ronald Aylmer Fisher (1890-1962): staticien anglais. relative à la fonction densité de probabilité la matrice :
[TABLE]
19.10.1. La Quantité d’Information de Fisher
Définition 19.3
Si est un scalaire, on appelle la quantité d’information de Fisher la valeur:
[TABLE]
Existe-t-il des estimateurs (sans biais) meilleurs que d’autres? La réponse est donnée par l’inégalité de Rao222Calyampudi Radhakrishna Rao (1920 - ): mathématicien indien, éminent spécialiste en statistiques.-Cramér333Harald Cramér (1893-1985): mathématicien et statisticien suédois..
19.11 L’Inégalité de Rao-Cramér
L’erreur moyenne quadratique d’un estimateur sans bais peut s’écrire en utilisant la matrice variance-covariance où :
[TABLE]
Théorème 19.1
(L’Inégalité de Rao-Cramér)(S. Amari et H. Nagaoka, 2000) La matrice variance-covariance d’un estimateur sans biais vérifie:
[TABLE]
dans le sens que est une matrice définie semi-positive, soit:
[TABLE]
Définition 19.4
* est un estimateur efficace de , si:*
[TABLE]
En appliquant le principe de maximum de vraisemblance à la fonction de densité
[TABLE]
on obtient:
[TABLE]
Donc à l’ordre deux, on a : . Alors sont dits asymptotiquement sans biais, asymptotiquement de précision maximale et asymptotiquement normaux et est maximale.
Exemple de l’application de l’inégalité de Rao-Cramér:
Soit le cas d’un seul paramètre inconnu , d’échantillon de densité de probabilité:
[TABLE]
On a alors:
[TABLE]
Par suite:
[TABLE]
L’inégalité de Rao-Cramér est bien vérifiée, en effet , on a bien sûr:
[TABLE]
Soit un triangle plan où on mesure les deux côtés et l’angle et on veut estimer le côté , on a:
[TABLE]
Un estimateur de est:
[TABLE]
Cet estimateur est biaisé.
Comme et , donc:
[TABLE]
Or:
[TABLE]
si est petite par rapport aux valeurs. Donc est quasiment sans biais.
19.12 L’Ecriture Matricielle des Equations d’Observations
Les équations d’observations peuvent s’écrire matriciellement:
[TABLE]
où:
-
est la matrice des coefficients;
-
le vecteur des résidus;
-
est le vecteur: ;
-
est le vecteur des inconnues (les corrections aux valeurs approchées ).
Pour équations d’observations et le nombre des inconnues, on a :
[TABLE]
La solution de (19.77) par la méthode des moindres carrés est obtenue en minimisant la forme quadratique:
[TABLE]
où désigne la matrice transposée de .
Sachant que:
[TABLE]
L’équation (19.78) s’écrit:
[TABLE]
Comme et sont des scalaires, alors:
[TABLE]
Par suite:
[TABLE]
On pose:
[TABLE]
Alors la matrice N est symétrique et inversible c’est-à-dire régulière et de rang . En effet la matrice est de rang c’est-à-dire on peut extraire une sous matrice de telle que son déterminant est différent de zéro:
[TABLE]
La matrice est définie positive, on entend par là que :
[TABLE]
car :
[TABLE]
le carré de la norme du vecteur et pour on a sinon la matrice serait de rang < , par suite (19.80) est vérifiée.
La matrice est dite la matrice normale.
En posant:
[TABLE]
c’est une fonction scalaire du vecteur X. La solution de (19.81) avec minimum est telle que:
[TABLE]
La dérivée de (19.81) par rapport au vecteur des inconnues est telle que:
[TABLE]
Soit:
[TABLE]
où est le vecteur déterminé des inconnues. Si est le vecteur approché des inconnues, on a :
[TABLE]
où est le vecteur des valeurs définitives des inconnues.
Le vecteur se détermine par:
[TABLE]
Le vecteur des observations compensées est donné par:
[TABLE]
Notons que:
[TABLE]
En effet, , soit en tenant compte que . La condition (19.87) est appelé renormalisation. Elle est importante car elle garantit que le résultat obtenu est bien celui des moindres carrés.
Dans ce chapitre, on a considéré le système:
[TABLE]
sans parler de la matrice . Si on considère la matrice de poids et la matrice de variance des observations:
[TABLE]
La solution de (19.76) des moindres carrés est obtenue à partir du système normal:
[TABLE]
en minimisant ou encore si la matrice est diagonale :
[TABLE]
Posant encore la matrice normale, la solution de (19.88) est:
[TABLE]
La condition de la renormalisation devient:
[TABLE]
Pour l’estimation du facteur de la variance unitaire, on admet que l’estimateur de est donné par :
[TABLE]
Pour l’estimateur de la variance de , on va utiliser la propriété suivante:
[TABLE]
avec la matrice variance de et celle de . En effet:
[TABLE]
avec l’opérateur espérance mathématique. D’où:
[TABLE]
Or :
[TABLE]
Par suite:
[TABLE]
Comme:
[TABLE]
d’où:
[TABLE]
Comme , d’où:
[TABLE]
D’où l’estimateur de la variance de :
[TABLE]
La matrice permet de déterminer la précision des inconnues déterminées par la méthode des moindres carrés.
19.13 Méthode des Equations d’Observations avec Equations de condition
19.13.1. Cas où les grandeurs à déterminer sont liés par relations
On suppose qu’il existe parmi les n grandeurs observées un ensemble au moins de grandeurs observées permettant de déterminer les grandeurs inconnues, c’est-à-dire que la matrice de est de rang .
Après linéarisation (si nécessaire), les liaisons entre les grandeurs inconnues donneront bien à un système de équations de condition:
[TABLE]
avec rang = et et ne dépendent que de .
Pour estimer , on a considéré l’ensemble des relations:
[TABLE]
avec rang et rang . Après compensation, on aura le système:
[TABLE]
On remarque qu’une équation de condition est équivalente à une équation d’observations dont le poids est infini: en effet peut être considéré comme un vecteur d’observations fictives certaines dont les erreurs moyennes quadratiques sont nulles et par suite les poids infinis.
On se ramène au cas plus haut, à partir de exprimer inconnues en fonction des autres et les reporter dans .
19.14 Application de la Méthode des Moindres Carrés
On a le modèle fonctionnel linéaire (19.100) qu’on écrit sous la forme:
[TABLE]
avec:
[TABLE]
[TABLE]
[TABLE]
On suppose que les erreurs suivent la loi normale , est le poids et . Ecrivons la fonction de densité de probabilité, soit:
[TABLE]
Les inconnues sont et . On considère la fonction scalaire:
[TABLE]
avec le vecteur des multiplicateurs de Lagrange:
[TABLE]
Les inconnues sont obtenues en cherchant les extrémums de . s’écrit:
[TABLE]
Les extrémums de sont obtenus par la solution de:
[TABLE]
En notant que :
[TABLE]
L’équation (19.104) donne:
[TABLE]
(19.105) et (19.106) donnent le système :
[TABLE]
La solution du système précédent donne la solution des moindres carrés. L’estimateur est un estimateur sans biais, asymptotiquement normal, alors que l’estimateur :
[TABLE]
est biaisé mais asymptotiquement sans biais. Par contre, si on prend:
[TABLE]
est sans biais.
Une question se pose: le choix des paramètres influence-t-il sur les solutions. Pour la méthode des moindres carrés, la solution est indépendante. En effet, soit le système:
[TABLE]
Soit le système avec d’autres paramètres:
[TABLE]
Soit une autre solution, on a alors:
[TABLE]
En utilisant l’inégalité de Rao-Cramér:
[TABLE]
19.15 Exemples de Pose d’Equations d’Observations
On a les éléments de base:
[TABLE]
où sont respectivement les vecteurs des valeurs nominales des paramètres inconnus et de l’observable. le vecteur des résidus réels et une fonction liant les inconnues et l’observable.
A partir de la relation:
[TABLE]
soit:
Compensé + Calculé - Observé = Résidu
On va écrire la relation (19.115) pour différents types d’observations.
19.15.1. La Géodésie Bidimensionnelle
Observation d’une distance
Soient deux points et de coordonnées approximatives et ). La distance calculée est :
[TABLE]
La fonction est:
[TABLE]
Soit:
[TABLE]
D’où:
[TABLE]
En posant:
[TABLE]
On a alors la relation d’observations d’une distance entre les points 1 et 2:
[TABLE]
Si le point 1 est connu, on a alors:
[TABLE]
Observation Angulaire
Ecrivons la relation (19.115) pour la direction :
[TABLE]
[TABLE]
Cette relation est remplacée par une relation d’estimation:
[TABLE]
Comme lecture faite + correction de compensation, d’où:
[TABLE]
On introduit un réseau géométrique approché et une valeur approchée du calage du limbe au point d’où:
[TABLE]
est la différentielle de :
[TABLE]
est calculée à partir du réseau approché et on a :
[TABLE]
Il vient:
[TABLE]
D’où la relation d’observations angulaires au point vers le point :
[TABLE]
Si le point est connu et qu’il y’a une inconnue d’orientation, alors l’équation précédente devient:
[TABLE]
Dans le cas d’un relèvement sur un point connu, alors on a et:
[TABLE]
Pour les équations (19.127), (19.128), et (19.129) les résidus sont exprimés en radians. Pour avoir la même unité (c-a-d le ) que les résidus des équations (19.121) et (19.122), on multiplie les équations (19.127), (19.128) et (19.129) par la distance . On aura pour l’équation (19.129), l’équation:
[TABLE]
19.15.2. La Géodésie Tridimensionnelle
Observation d’une distance
Soient et les coordonnées tridimensionnelles approchées des points et . La distance spatiale est calculée par:
[TABLE]
D’où l’équation d’observations d’une distance spatiale en géodésie 3D:
[TABLE]
avec:
[TABLE]
On pose:
[TABLE]
La relation (19.131) devient:
[TABLE]
Si le point est connu, alors et :
[TABLE]
19.16 Les Inverses Généralisées
Dans le problème des compensations, on est amené à inverser des matrices.
Alors si est une matrice carrée inversible, alors son inverse est unique et vérifie:
[TABLE]
où est la matrice unité.
Si est une matrice rectangulaire:
[TABLE]
est solution de :
[TABLE]
Ce système a une infinité de solutions.
Les inverses généralisées servent à résoudre les équations linéaires impossibles. Par exemple:
[TABLE]
système qu’on écrit sous la forme:
[TABLE]
19.16.1. Propriétés des matrices
Propriété 19.2 Soient deux matrices et , alors:
[TABLE]
Propriété 19.3 (Théorème des pivots): Soit la matrice , s’il existe une sous matrice d’ordre {}_{r}A_{r}$$=A_{11} régulière de rang , on peut écrire la matrice sous la forme:
[TABLE]
Les premières colonnes de sont indépendantes les colonnes de à s’expriment en fonction des premières colonnes. On a donc:
[TABLE]
Définition 19.5
Soit une matrice quelconque, inverse généralisée de si . (A. Bjerhammer, 1973).
19.16.2. Existance
Soit une matrice de rang , d’après le théorème des pivots, on peut écrire sous la forme donnée par (19.141), alors une inverse généralisée de est donnée par:
[TABLE]
Vérification. On a:
[TABLE]
Propriété 19.4 Si est une inverse généralisée, les autres matrices inverses généralisées s’expriment comme suit:
[TABLE]
On vérifie aisément que .
Propriété 19.5 Les matrices et , et sont des matrices carrées et nilpotentes c’est-à-dire .
19.17.3. Les Systèmes Linéaires
Soit le système linéaire suivant:
[TABLE]
avec =, = et =.
Une condition nécessaire et suffisante pour l’existance de solutions de (19.148) est:
[TABLE]
Les solutions de (19.148) sont données par:
[TABLE]
où est une inverse généralisée particulière et une matrice arbitraire.
Note Historique: La méthode des moindres carrés fut publiée par la première fois par Adrien-Marie Legendre444Adrien-Marie Legendre (1752-1833): mathématicien et géodésien français. en 1809. La justification comme procédure statistique de la méthode des moindres carrés fut donnée par Carl Friedrich Gauss en 1809, puis en 1810 dans son mémoire sur l’astéroïde Pallas découvert par Heinrich Wilhelm Olbers555Heinrich Wilhelm Olbers (1758-1840): astronome et physicien allemand. le 28 mars 1802. Selon Gauss, la méthode des moindres carrés conduit à la meilleure combinaison possible des observations quelle que soit la loi de probabilité des erreurs. Elle fut immédiatement reconnue comme une contribution majeure. Gauss affirma l’avoir déjà utilisée dès 1795. Il est certain qu’il s’en servit en 1801 pour déterminer l’orbite de la comète Cérès découverte par Giuseppe Piazzi666Giuseppe Piazzi (1746-1826): astronome et mathématicien italien. le 1er janvier 1801.
Le mathématicien américain d’origine irlandaise Robert Adrain777Robert Adrian (1775-1843): mathématicien américain. avait, à l’occasion d’une question de topographie, publié un article daté de 1808 (mais paru en 1809) dans lequel il exposait également la méthode des moindres carrés. Ce travail passa totalement inaperçu en Europe. En 1818, Adrain appliqua encore cette méthode à la détermination de l’aplatissement de la Terre à partir de mesures du méridien et en tira une estimation des axes de l’ellipsoïde terrestre.
Parmi les méthodes de calcul de l’inversion de la matrice normale, on cite la méthode dite de Cholesky888André-Louis Cholesky (1875-1918): ingénieur polytechnicien et géodésien militaire français.. Ce dernier a été le Chef du Service Topographique Tunisien entre mai 1913 et août 1914. (C. Brezinski, 2005, § 22)
19.17 Exercices et Problèmes
Exercice 19.1
Soit un triangle , on observe les angles et les côtés et :
[TABLE]
1. Calculer les angles et les côtés compensés.
2. Calculer les poids de l’angle et du côté .
3. Déterminer une estimation du facteur de variance unitaire.
Problème 19.1
Les directions suivantes sont observées respectivement aux stations et d’un quadrilatère comme suit:
[TABLE]
Les observations sont non corrélées. l’écart quadratique moyen de ces observations est identique et vaut .
1. Compenser les directions et calculer leurs poids et celui de l’angle .
2. Calculer l’estimateur du facteur de variance unitaire et celui de .
3. Des observations de nivellement ont été effectuées sur les lignes et . Les différences d’altitudes observées sont les suivantes:
[TABLE]
Les observations sont non corrélées et de précision identique. Compenser les observations ci-dessus et calculer un estimateur du facteur de variance unitaire.
Problème 19.2
1. Montrer que dans un cheminement altimétrique de précision, le poids de l’observation entre deux repères est inversement proportionnel de leur distance en supposant l’égalité des portées et que les observations sont non corrélées.
2. Une polygonale (voir Fig. 19.2) a été observée par le nivellement de précision. L’instrument utilisé a une précision de par . Les observations considérées non corrélées sont les suivantes:
[TABLE]
L’altitude du repère est de et non entachée d’erreurs. Calculer par compensation des observations les altitudes des repères et et leurs écarts-types.
3. Calculer l’écart-type de la différence d’altitudes entre les repères et .
4. Donner une estimation de la précision par du nivellement effectué.
Problème 19.3
On veut étalonner un anéroide, appareil donnant la pression de l’air, par la formule:
[TABLE]
*où sont deux constantes, la température en degrés centigrades. Les paramètres et sont lus respectivement de l’anéroide et à partir d’un baromètre en mercure, et exprimés en .
Pour déterminer et , des lectures ont été prises à différentes températures (voir tableau 19.1).
Ces observations sont non corrélées. L’écart-type de la lecture de est de ; et sont supposées sans erreurs.
1. Calculer par la méthode des moindres carrés les constantes et .
2. Estimer le facteur de variance unitaire.
3. Déterminer la variance et la covariance de et .
Problème 19.4
On considère le réseau suivant constitué des points . Le point est considéré fixe.
Les coordonnées des points sont dans le système Carthage34 dont l’ellipsoïde de référence est celui de Clarke Français 1880 (. On veut calculer la compensation des observations dans le plan en utilisant les coordonnées Lambert Sud Tunisie. On prendra comme coefficient d’échelle nominale . On rappelle que pour la représentation Lambert Sud Tunisie: Nord; Est de Greenwich.
1. Calculer les coordonnées planes du point fixe .
2. Calculer les coordonnées approchées des autres points.
3. On donne ci-dessous les tours d’horizon effectués aux points du réseau:
[TABLE]
4. On mesure la distance suivant l’ellipsoïde . Calculer réduite au plan de la représentation plane.
5. Donner la liste des inconnues à déterminer.
6. Ecrire l’équation matricielle du système des moindres carrés et déterminer la matrice des coefficients et le vecteur des observables. On prendra comme matrice de poids la matrice unité .
7. Calculer la matrice normale.
8. Résoudre le système de la solution des moindres carrés.
9. Exprimer les coordonnées planes définitives et en déduire leurs coordonnées géographiques définitives.
Problème 19.5
En statistiques, la loi normale est une famille de distributions de probabilités caractérisées par la fonction de densité:
[TABLE]
où est la moyenne et la variance. On note par , soit:
[TABLE]
Soit une variable aléatoire ayant comme fonction de densité . On rappelle les opérateurs suivants espérance mathématique ou moyenne et variance:
[TABLE]
On donne la formule: .
1. Montrer que:
[TABLE]
2. Montrer que:
[TABLE]
*3. Calculer . *
4. On pose . Soit l’espace engendré par . On définit sur l’opérateur à deux variables aléatoires :
[TABLE]
Justifier qu’on peut écrire:
[TABLE]
*5. Montrer que définit un produit scalaire sur . *
6. On pose: et . On définit le tenseur métrique sur par:
[TABLE]
Montrer que la matrice est donnée par:
[TABLE]
et que la première forme fondamentale sur s’écrit:
[TABLE]
Problème 19.6
Soit un triangle de côtés et d’angles et . On se propose:
- d’estimer et , et les variances de ces déterminations. Les observations sont:
[TABLE]
*On choisit ici comme unités normalisées le décimillimètre pour les mesures de distances, et le décimilligrade pour les angles.
On prend les poids égaux aux inverses des carrés des de chaque observation. On donne la matrice des poids :
[TABLE]
*On prendra comme valeurs approchées des inconnues .
1. Ecrire les paramètres observées et les valeurs observées des inconnues dans les nouvelles unités.
2. Soit le vecteur des inconnues. On adopte le système suivant liant les inconnues aux observables:
[TABLE]
Ceci étant, on posera pour les grandeurs à déterminer:
[TABLE]
et pour les grandeurs observées:
[TABLE]
En linearisant la troisième équation de (19.174), montrer que l’équation d’observation s’écrit:
[TABLE]
où :
[TABLE]
*(étant entendu qu’on exprime en ).
3. Montrer que le système des moindres carrés s’écrit:
[TABLE]
4. Résoudre le système précédent par la méthode des moindres carrés et montrer que la matrice normale est donnée par:
[TABLE]
5. Montrer que:
[TABLE]
6. Déterminer les variances des inconnues et .
Chapter 20 **Présentation des Aspects Théoriques de la Géométrie de la Compensation non-Linéaire par les Moindres Carrés **
L’objet de ce chapitre est de présenter les aspects théoriques de la géométrie de la compensation non-linéaire par les moindres carrés. Il est inspiré du travail réalisé par P.J.G. Teunissen (P.J.G. Teunissen, 1985).
20.1 Introduction
La théorie des moindres carrés telle qu’elle a été définie par Gauss repose sur la linéarisation. On arrive au modèle de Gauss-Markov111Andreï Markov (1856-1922): mathématicien russe.:
[TABLE]
avec:
-
le vecteur des inconnues;
-
la matrice des coefficients;
-
le vecteur des observables;
-
le vecteur des résidus.
La compensation des modèles linéaires a été l’objet de plusieurs recherches au cours des dernières années. Concernant la compensation non-linéaire, la recherche n’a pas été aussi développée et la bibliographie afférente a ce sujet est limitée.
20.2 Présentation du Problème
On considère une application non linéaire:
[TABLE]
où et deux variétés géométriques lisses munies respectivement d’un produit scalaire ou encore d’une métrique et . On appelle :
[TABLE]
Le problème de la compensation non linéaire peut être divisé en deux sous problèmes:
-
le premier problème est de trouver les estimateurs et respectivement de et vérifiant la condition (20.5) ci-dessous;
-
le deuxième sous problème est d’obtenir les propriétés statistiques des deux estimateurs précédemment cités.
Afin de pouvoir résoudre ces deux questions importantes, on se limite au cas de la résolution du problème par les estimateurs des moindres carrés. Pour celà, on suppose que l’application est injective c’est-à-dire:
[TABLE]
ou encore, l’antécédent d’une image est un seul point.
La condition des moindres carrés est :
[TABLE]
où on a noté le vecteur des observables.
On appelle et les applications non linéaires avec:
[TABLE]
Due à la non linéarité des applications et , il est difficile de trouver une formule fermée en . La solution est d’appliquer des méthodes itératives:
- on part d’un point et on essaye de générer une suite qui convergera vers le point solution . Les méthodes trouvées dans la littérature procèdent conformément aux étapes suivantes (J.M. Ortega & W.C. Rheinboldt, 1970):
[TABLE]
-
on prend et on donne une première valeur ;
-
on détermine le pas ;
-
on détermine un scalaire tel que :
[TABLE]
cette relation assure la convergence;
- voir si la convergence est assurée, dans ce cas , sinon, et on passe à l’étape 2.
La résolution de (20.8) dépend du choix de et .
La méthode itérative comprend deux catégories:
-
la première est une méthode itérative directe qui ne nécessite pas l’utilisation des données de la fonction (20.5);
-
la deuxième catégorie concerne la méthode itérative du gradient qui fait appel aux calculs des dérivées de l’expression .
Concernant la détermination des propriétés statistiques, elle n’est pas aussi facile comme pour le cas linéaire. On a peu d’information sur une méthodologie pour traiter cette question.
20.3 Les Eléments Mathématiques de l’Optimisation des Problèmes Non-Linéaires
Les problèmes non-linéaires sont rencontrés dans divers phénomènes physiques tels que le mouvement des fluides, l’élasticité, la relativité, la géodésie, et autres. On présente ci-après quelques définitions et théorèmes relatives à ces problèmes. On s’intéresse à l’étude des fonctions d’un domaine de .
Soit et une fonction: avec . D’où les définitions:
Définition 20.1
Soit la fonction à optimiser définie sur , à . On appelle la fonction objectif ou énergie.
Définition 20.2
Un point est dit un minimum global de la fonction énergie si:
[TABLE]
Définition 20.3
Un point est dit un minimum global strict de la fonction énergie si:
[TABLE]
Si le domaine est un compact de d’où le théorème suivant qu’on énonce sans démonstration:
Théorème 20.1
Si est continue où est un compact ( c’est-à-dire est un fermé borné), alors la fonction admet au moins un minimum global .
Pour définir le cas du maximum relatif ou global, on considère l’inégalité ( ou ).
20.3.1. Dérivée Directionnelle
Soit , la définition standard du gradient de est le vecteur noté:
[TABLE]
Définition 20.4
Soit un espace vectoriel réel muni d’un produit scalaire qu’on note . Le gradient d’une fonction en un point est le vecteur qui vérifie:
[TABLE]
La définition telle qu’elle est donnée ci-dessus est appelée la dérivée directionnelle de suivant la direction du vecteur .
On suppose qu’on est dans le cas d’un espace vectoriel muni du produit scalaire euclidien. Soient et , on a donc:
[TABLE]
Pour ; on obtient:
[TABLE]
C’est le produit scalaire du vecteur avec le gradient défini usuellement dans .
Dans la suite de ce chapitre, on considère que les fonctions objectifs ou énergies sont des fonctions de classe deux fois continûement différentiable dans leurs domaines de définition.
20.3.2. Propriété du gradient
On considère que le point se mouve le long d’une courbe paramétrée par une variable , soit . Alors devient une fonction de :
[TABLE]
En différentiant l’équation précédente, on obtient:
[TABLE]
C’est la dérivée directionnelle suivant le vecteur tangent à la courbe en . Si , on est dans le sens où la fonction croît, par contre si , on est dans le sens où la fonction décroît. Alors si , on dit que est un point critique d’où la définition:
Définition 20.5
Un point est un point critique de la fonction objectif si:
[TABLE]
Par suite, on a le théorème suivant:
Théorème 20.2
*Tout minimum relatif à l’intérieur d’un domaine de la fonction est aussi un point critique. *
Démonstration : Soient un minimum relatif et un vecteur , et on considère la fonction scalaire :
[TABLE]
où tel que . Comme est minimum relatif, donc ce qui implique , soit est un minimum pour la fonction scalaire, dans ce cas, on a nécessairement pour . Or d’après la formule (20.16):
[TABLE]
Pour , on obtient:
[TABLE]
Comme est arbitraire, par suite on a:
[TABLE]
Donc est un point critique. On note que la reciproque n’est pas toujours vraie. On peut avoir sans que soit un point minimum relatif ou global.
20.3.3. Etude de la Dérivée Seconde
Dans le cas d’une fonction réelle d’une seule variable, telle que au point , l’étude de peut donner une information sur le statut du point critique , d’où la proposition (P.J. Olver, 2013):
Proposition 20.1
Soit une fonction scalaire réelle de classe et supposons que est un point critique de c’est-à-dire :
- si est un minimum relatif, alors ;
- si , alors est un minimum relatif strict.
La démonstration utilise l’expression de en utilisant le développement de Taylor au voisinage de soit :
[TABLE]
Si considère maintenant le cas de variables pour une fonction , la dérivée seconde est représentée par une matrice dite le Hessien 222Nommé en hommage au mathématicien allemand Ludwig Otto Hesse (1811-1874).:
[TABLE]
Comme est supposée de classe , par suite la matrice hessienne ci-dessus est symétrique:
[TABLE]
On a vu d’après la proposition (20.1), que pour les fonctions scalaires à une seule variable de classe , que si la dérivée seconde est strictement positive en un point , alors ce point est un minimum relatif strict donc un minimum relatif. Cependant pour les fonctions scalaires de classe à plusieurs variables, on a le théorème suivant (H. Cartan333Henri Cartan (1904-2008): un des grands mathématiciens français du XXème siècle, fils du célèbre mathématicien Elie Cartan., 1979) :
Théorème 20.3
Soit de classe où est un ouvert de :
- si est un minimum relatif de , alors il est nécessaire un point critique, c’est-à-dire ;
*- de plus, la matrice hessienne est semi-définie positive au point , c’est-à-dire ; *
*- inversement, si est un point critique avec la matrice hessienne définie positive , alors est un minimum relatif strict de . *
20.4 La Méthode de Newton
En revenant à la condition des moindres carrés donnée par l’équation (20.5):
[TABLE]
on prend :
[TABLE]
Le problème posé est la recherche de:
[TABLE]
On notera le minimum de l’équation précédente par .
20.4.1. Les Méthodes Itératives de Descente
Parmi les méthodes de résolution de l’équation (20.23), on cite les méthodes itératives de descente. Celà signifie que la fonction prend des valeurs en décroissant quand l’indice de l’itération croît.
On part d’une valeur , on calculera en fonction de tel que :
[TABLE]
où sont des vecteurs de et un réel. On définit alors les étapes suivantes:
pour k=0, on part d’une valeur approchée donnée; 2. 2.
on fait le choix d’une direction telle que la fonction décroît; 3. 3.
on détermine le coefficient tel que : ; 4. 4.
on teste si la convergence est obtenue soit où une quantité qui sera fixée a priori pour la convergence de la méthode d’itération.
On note que les méthodes des itérations de descente se distinguent en deux groupes:
-
le premier où on n’utilise pas les dérivées partielles de la fonction énergie ;
-
par contre pour le deuxième groupe, on fait usage des dérivées partielles de la fonction , pour le choix de la direction du vecteur , c’est la technique dite des gradients.
20.4.2. Préliminaires
D’après l’équation (20.24), liant les vecteurs et le coefficient , on a:
[TABLE]
On parlera de la méthode de descente s’il existe tel que:
[TABLE]
soit:
[TABLE]
On écrit alors un développement de Taylor de au point :
[TABLE]
ou encore:
[TABLE]
Comme , on peut avoir ce coefficient si:
[TABLE]
Donc on peut choisir un vecteur tel que l’inégalité précédente soit vérifiée par:
[TABLE]
où est une matrice arbitraire définie positive dépendante de . En effet:
[TABLE]
car la matrice est définie positive.
On revient maintenant à l’équation (20.24), elle s’écrit:
[TABLE]
Or le coefficient dépend aussi de , alors on peut écrire l’équation (20.32) en posant:
[TABLE]
sous la forme:
[TABLE]
où .
Au point de la convergence, on obtient:
[TABLE]
Il revient donc ce qu’on appelle à la recherche d’un point fixe de la fonction . La méthode itérative concernant la fonction est dite la méthode itérative du point fixe. Le théorème suivant précise les conditions de convergence vers l’unique solution de l’équation (20.35):
Théorème 20.4
(Itération du point fixe): Soit tel que :
i)- ;
ii)- est une fonction continue;
iii)- tel que avec :
[TABLE]
Alors:
une solution de existe dans ; 2. 2.
la solution est unique; 3. 3.
la méthode itérative converge vers c’est-à-dire .
Pour une démonstration de ce théorème voir (P.J.G. Teunissen, 1990).
Si on peut vérifier la condition iii), on peut appliquer dans ce cas le théorème cité ci-dessus. Si on considère que est un ouvert convexe, dans ce cas l’application du théorème 18.3 de Taylor- Maclaurin du chapitre § [18] donne:
[TABLE]
où avec . Si on prend :
[TABLE]
alors la condition iii) est vérifiée.
On va voir maintenant ce que et doivent vérifier. Partant de l’équation (20.33):
[TABLE]
on pose:
[TABLE]
c’est une matrice définie positive, alors l’équation (20.33) s’écrit :
[TABLE]
On prend sa dérivée partielle par rapport à , ce qui donne:
[TABLE]
avec les vecteurs colonnes de la matrice et la matrice unité . Passant à la norme, d’où:
[TABLE]
Donc:
[TABLE]
Si on veut que , on prendra :
[TABLE]
Sachant que pour la solution le vecteur implique tel que si , par continuité de , le terme:
[TABLE]
est infiniment petit devant 1. Revenons à , on obtient pour que la condition iii) soit vérifiée :
[TABLE]
On verra par la suite comment appliquer cette condition.
20.4.3. La Méthode de Newton: Cas d’une fonction réelle
Supposons qu’on ait une fonction de et on cherche la solution de :
[TABLE]
L’équation de la tangente à la courbe de la fonction en un point est donnée par:
[TABLE]
soit:
[TABLE]
Cette tangente coupe l’axe des au point tel que:
[TABLE]
On suppose évidemment que . L’équation (20.46) représente la formule de récurrence pour déterminer la solution de .
20.4.4. La Méthode de Newton: Cas de la fonction énergie
On rappelle que le problème posé est la recherche de la solution du minimum de , soit:
[TABLE]
On remplace dans (20.45) par . Alors l’équation de récurrence (20.46) devient pour la fonction à plusieurs variables:
[TABLE]
qu’on écrit aussi sous la forme:
[TABLE]
En comparant l’équation (20.48) avec l’équation (20.32), on déduit que le choix de est le suivant:
[TABLE]
La méthode de Newton permet de vérifier la condition:
[TABLE]
ce qui permet d’obtenir la convergence de l’itération.
20.4.4.1. La Vitesse de Convergence
La vitesse de convergence de l’itération est obtenu en exprimant en fonction de . On commence par développer l’équation (20.48) au voisinage de la solution . Comme:
[TABLE]
soit:
[TABLE]
Or d’après (20.48):
[TABLE]
Par suite pour , on a :
[TABLE]
L’équation (20.51) devient:
[TABLE]
On calcule maintenant la dérivée seconde de soit ou :
[TABLE]
Comme la matrice est une matrice carrée définie positive, donc elle inversible, on a alors:
[TABLE]
Par suite:
[TABLE]
Pour , on a en tenant compte de :
[TABLE]
L’équation (20.54) s’écrit:
[TABLE]
ce qui donne: soit:
[TABLE]
où est une constante qui dépend de . Donc la vitesse de convergence de l’itération est majorée par une fonction quadratique de la vitesse de convergence de l’itération . D’où le théorème:
Théorème 20.5
Si est continue et inversible au voisinage d’une solution , alors la vitesse de la convergence de l’itération de la méthode de Newton est quadratique de la vitesse de convergence de l’itération .
En d’autres termes, l’avantage de la méthode de Newton est que la convergence est très rapide. Mais comme inconvéniants de la méthode de Newton c’est le calcul et le stockage des éléments de la matrice laquelle il faut s’assurer qu’elle est définie positive et qu’elle est inversible.
20.5 La Méthode de Gauss-Newton
Dans ce paragraphe, on va présenter la méthode de Gauss-Newton pour minimiser la fonction:
[TABLE]
avec et une matrice carré définie positive et . De plus, on suppose que . Quand varie dans , le point décrit une variété de dimension plongée dans . représente le carré de la distance du point au point . La recherche de revient donc à trouver le point de tel que sa distance au point soit minimale.
On pose :
[TABLE]
Comme:
[TABLE]
Ce qui donne:
[TABLE]
avec une matrice . Pour appliquer la méthode de Newton, on a besoin de calculer , soit:
[TABLE]
d’où:
[TABLE]
or , on obtient finalement:
[TABLE]
Par la formule (20.48), on a la relation entre et :
[TABLE]
soit:
[TABLE]
Seulement, la formule d’itération ci-dessus de la méthode de Newton ne prend pas en considération de l’avantage de l’expression de la fonction donnée par (20.57). Au lieu de prendre , on prendra :
[TABLE]
et on fait abstraction du terme dont le calcul est plus compliqué.
La matrice est une matrice définie positive. En effet, soit un vecteur , comme est une matrice définie positive, d’où:
[TABLE]
car est définie positive et que . Donc est définie positive par suite est définie positive.
On obtient pour la méthode dite de Gauss-Newton la formule:
[TABLE]
La solution vérifie:
[TABLE]
L’interprétation de la première équation est que le vecteur résidu est orthogonal au vecteur soit est perpendiculaire au plan tangent au point de la variété , donc représente la distance minimale du point à la variété .
La deuxième équation de (20.64) a une autre interprétation géométrique moins évidente qu’on découvrira dans le chapitre suivant.
20.6 Exercices et Problèmes
Exercice 20.1
On considère et on définit la fonction par :
[TABLE]
1. Chercher les points critiques réels de .
2. Montrer que le point est un point minimum de .
3. Montrer que le Hessien de est une matrice définie positive si et indéfinie si .
4. Montrer que la formule de récurrence de Newton s’écrit avec :
[TABLE]
Problème 20.1
Soient le plan et la sphère d’équations respectivement: et . On veut chercher le point tel que sa distance au plan soit maximale.
1. Montrer que la distance d’un point au plan est donnée par :
[TABLE]
2. Pour répondre à la question posée ci-dessus, on considère la fonction: E(x,y,z,\lambda)=-(x+y+z-1)^{2}$$-\lambda(x^{2}+y^{2}+z^{2}-1). Ecrire le système d’équations donnant les points critiques de qu’on note par (1).
3. Montrer que si , on arrive à une contradiction. On suppose que . Que représente le cas .
4. On suppose que . Résoudre le système (1). Soit le point tel que ses coordonnées sont négatives.
5. Montrer que la matrice hessienne de pour s’écrit sous la forme:
[TABLE]
6. Si on pose . Montrer que . En déduire que pour tout .
7. Montrer que pour le point , on obtient un minimum strict de . A-t-on répondu à la question du problème.
Chapter 21 Interprétation Géométrique de la Compensation Non-Linéaire
21.1 Introduction
E. Grafarend et B. Schaffrin ont étudié dans un article (E.W. Grafarend & B. Schaffrin, 1989), la géométrie de la compensation ou l’ajustement non-linéaire et ont présenté le cas du problème d’intersection plane en utilisant le modèle de Gauss-Markov, par les moindres carrés. Dans ce chapitre, on présente les principes de la géométrie de la compensation non-linéaire par la méthode des moindres carrés en s’appuyant sur le lemme de Pázman (A. Pázman, 1984).
21.2 La Géométrie Non Linéaire du Modèle de Gauss-Markov
Le modèle non linéaire de Gauss-Markov est défini par:
[TABLE]
avec:
-
: le vecteur des observations ;
-
: le vecteur des inconnues ;
-
: le vecteur des erreurs suit la loi normale avec et la matrice de dispersion ou variance, on prendra . est la matrice des poids et une constante positive;
-
: est une fonction donnée injective d’un ouvert et .
Remarque: dans le cas d’un modèle linéaire, la fonction où est une matrice .
On note l’image de par la fonction . est une variété de dimension vérifiant les conditions:
(i): les vecteurs sont linéairement indépendants en chaque point ;
(ii): les fonctions sont continues sur pour .
On introduit un produit scalaire:
[TABLE]
D’où la norme du vecteur :
[TABLE]
dans l’espace vectoriel en prenant la matrice de poids une matrice diagonale.
Alors la solution par les moindres carrés sera définie par:
[TABLE]
Cette condition est exprimée par les équations suivantes:
[TABLE]
En effet, on veut minimiser la fonction:
[TABLE]
Comme est une fonction positive, minimiser c’est aussi minimiser , soit d’où:
[TABLE]
soit:
[TABLE]
or:
[TABLE]
Par suite:
[TABLE]
ou encore :
[TABLE]
ce qui donne en utilisant (21.5):
[TABLE]
Géométriquement, cela veut dire que le vecteur erreur est perpendiculaire (produit scalaire nul) au plan tangent de la variété au point (s’il existe).
Pour le cas non-linéaire, la condition (21.10) est nécessaire mais non suffisante. Pour obtenir le minimum, il faut que la matrice soit définie positive.
21.3 Interprétation Géométrique
Dans cette section, on va clarifier l’interprétation géométrique de façon que la solution de (21.10) soit localement unique.
On considère la matrice définie par:
[TABLE]
Or:
[TABLE]
représente la métrique de la variété . La matrice est appelée en terme statistique la matrice d’information de Fisher.
On introduit la matrice définie par:
[TABLE]
or:
[TABLE]
D’où:
[TABLE]
Donc:
[TABLE]
Soit:
[TABLE]
On pose:
[TABLE]
c’est-à-dire:
[TABLE]
On revient à . Soit une ligne géodésique de passant par un point paramétrée par son abscisse curviligne , on a alors:
[TABLE]
où décrit une certaine courbe dans le domaine .
Le vecteur :
[TABLE]
représente le vecteur tangent à la ligne géodésique au point de . Ce vecteur vérifie:
[TABLE]
Par suite, la dérivée de ce vecteur par rapport à est un vecteur orthogonal à donc orthogonal à au point :
[TABLE]
c’est-à-dire parallèle au vecteur normal à la surface ou la variété et on retrouve la propriété que est une géodésique.
On remarque que pour une ligne géodésique, la courbure géodésique est nulle et la courbure normale coïncide avec la courbure de la courbe soit:
[TABLE]
le rayon de courbure. On appelle:
[TABLE]
C’est un vecteur unitaire perpendiculaire au plan tangent à la surface .
D’après l’équation (21.10), au point , le vecteur est perpendiculaire à . On note aussi :
[TABLE]
On a donc . Ce dernier est un espace vectoriel de dimension orthogonal à au point . On a aussi .
21.3.1. Lemme de Pázman
On peut maintenant énoncer le lemme de Pázman (A. Pázman, 1984) comme suit:
Lemme 21.1
(de Pázman:) Pour tout vecteur d’observation , et toute solution appropriée des équations:
[TABLE]
les conditions suivantes sont équivalentes:
1 - La matrice:
[TABLE]
est définie positive.
2 - Pour toute ligne géodésique vérifiant :
[TABLE]
on a l’inégalité:
[TABLE]
En effet, on suppose que la matrice est définie positive c’est-à-dire:
[TABLE]
On prend alors: . On a:
[TABLE]
Comme , on obtient:
[TABLE]
soit:
[TABLE]
Or pour :
[TABLE]
en notant les composantes de dans le plan tangent à au point . Comme:
[TABLE]
On prend , alors (21.30) devient:
[TABLE]
Comme donc la matrice est exprimée dans la base de soit . En utilisant (21.31), le nombre réel s’écrit:
[TABLE]
On remplace par:
[TABLE]
Par un calcul simple, l’équation (21.34) devient:
[TABLE]
Maintenant, on va s’intéresser au membre à droite du produit scalaire de l’équation (21.35). En différentiant l’équation (21.31) par rapport à , on obtient:
[TABLE]
Alors on a pour :
[TABLE]
Or en utilisant l’équation (21.10), le premier terme de la deuxième ligne de l’équation précédente est nul:
[TABLE]
et comme :
[TABLE]
Alors l’équation (21.37) devient:
[TABLE]
Or le deuxième membre n’est autre que l’équation (21.35). En utilisant (21.33), on obtient:
[TABLE]
Or:
[TABLE]
D’où:
[TABLE]
On suppose que reciproquement, on a pour toute géodésique de passant par le point vérifiant:
[TABLE]
et :
[TABLE]
tel que vérifiant :
[TABLE]
Comme:
[TABLE]
le remplaçant dans l’équation (21.41), on obtient:
[TABLE]
et en simplifiant par , soit:
[TABLE]
Comme:
[TABLE]
D’où en dérivant une deuxième fois par rapport à :
[TABLE]
En remplaçant dans (21.43), on obtient:
[TABLE]
ou encore:
[TABLE]
Or la première somme est nulle en vertu de l’équation (21.10). Il reste:
[TABLE]
Comme:
[TABLE]
et vérifie car c’est un vecteur unitaire tangent à la géodésique . Donc:
[TABLE]
soit:
[TABLE]
et ce-ci n’est autre que :
[TABLE]
On utilise l’équation (21.47), on a:
[TABLE]
ou encore:
[TABLE]
Finalement, on obtient:
[TABLE]
C’est-à-dire pour tout vecteur du plan tangent de :
[TABLE]
C.Q.F.D
Maintenant, on peut dire quand solution de (21.10) est solution des moindres carrés en référence à l’équation (21.4) et ce à partir du corollaire suivant:
Corollaire 21.1* Si est solution de:*
[TABLE]
avec :
[TABLE]
où désigne le rayon de courbure minimum de la variété , défini par:
[TABLE]
Alors coïncide avec la solution des moindres carrés .
Démonstration:
Comme les deux vecteurs et sont orthogonaux à , ils sont colinéaires et comme est un vecteur unitaire alors leur produit scalaire est plus petit ou égal à . Or ce terme est plus petit que d’après (21.56) et comme est le plus petit rayon de courbure, on a pour toute géodésique passant par . Ce-ci est traduit par l’équation:
[TABLE]
De cette dernière équation, on a:
[TABLE]
On utilise le lemme de Pázman cité ci-dessus, la matrice est définie positive donc est un minimum strict (H. Cartan, 1979). Or on a supposé que l’application est injective (si ), alors coïncide avec la solution des moindres carrés .
21.4 Exercices et Problèmes
Problème 21.1
Dans le plan affine , on a mesuré trois distances planes entre un point inconnu vers trois points connus dans trois directions différentes. On considère le modèle non linéaire de Gauss-Markov défini par:
[TABLE]
avec:
- : le vecteur des observations ;
- : le vecteur des inconnues ;
- : le vecteur des erreurs suit la loi normale avec et la matrice de dispersion ou variance, on prendra , est la matrice des poids égale à la matrice unité , une constante positive;
- : est une fonction donnée injective d’un ouvert définie par:
[TABLE]
On prendra comme composante du vecteur observation la quantité
1. Montrer que les vecteurs sont linéairement indépendants en chaque point .
2. Montrer que les fonctions sont continues sur pour .
3. Posons:
Calculer les coefficients de la matrice .
4. Soit la matrice carrée définie par:
[TABLE]
Calculer les coefficients .
5. Introduisons la matrice définie par:
[TABLE]
Calculer les éléments de la matrice et montrer qu’elle est définie positive.
Chapter 22 Bibliographie II
-
J.M. Ortega & W.C. Rheinboldt. 1970. Iterative Solution of Nonlinear Equations in Several Variables. Academic Press. 527p.
-
A. Bjerhammer. 1973. Theory of Errors and Generalized Matrix Inverses. Elsevier Scientific Publishing Compagny. Amsterdam. 420p.
-
H. Cartan. 1979. Cours de Calcul Différentiel. Collection Les Méthodes. Hermann, Paris. 362p.
-
P. Hottier. 1980. Théorie des Erreurs. Ecole Nationale des Sciences Géographiques. IGN France. 81p.
-
A. Pázman. 1984. Probability distribution of the multivariate nonlinear least-squares estimates. Kybernetika n°20, pp. 209-230.
-
P.J.G. Teunissen. 1985. The Geometry of Geodetic Inverse Linear Mapping and Non-Linear Adjustment. Publications on Geodesy, n°1, Volume 8, Netherlands Geodetic Commission. 177p.
-
E.W. Grafarend & B. Schaffrin. 1989. The Geometry of non-linear adjustment - the planar trisection problem. FESTCHRIFT to TORBEN KRARUP edited by E. Kejlo, K. Poder and C.C. Tscherning. Geodætisk Institut, Meddelelse n°58, pp. 149-172. København, Danmark.
-
** P.J.G. Teunissen**. 1990. Nonlinear least squares. Manuscripta Geodaetica, Vol 15, n°2, pp. 137-150.
-
S. Amari & H. Nagaoka. 2000. Methods of Information Geometry. Traduit du japonais par Daishi Harada. Translations of Mathematical Monographs, Vol 191. Oxford University Press. AMS. 206p.
-
C. Brezinski. 2005. La Méthode de Cholesky. Revue d’Histoire des Mathématiques, publication de la Société Mathématique de France. Vol 11 (2005), pp. 205-238.
-
P.J. Olver. 2013. Nonlinear Systems. 58p. Université de Minnesota.
List of Figures
- 2.1 Le triangle sphérique
- 2.2 Le triangle sphérique polaire
- 2.3 Calcul de la formule fondamentale
- 2.4 La règle de Nepier
- 2.5 Un fuseau sphérique
- 2.6 Les coordonnées de Cassini-Soldner
- 3.1 La sphère céleste
- 3.2 La verticale d’un lieu
- 3.3 Le plan méridien
- 3.4 Vertical d’un astre
- 3.5 Les coordonnées locales horizontales
- 3.6 Latitude et longitude Géographiques
- 3.7 Cercle et angle horaires
- 3.8 Les coordonnées équatoriales célestes
- 3.9 Heure sidérale locale
- 3.10 Relation fondamentale de l’astronomie de position
- 3.11 Relation entre et
- 4.1 Courbe plane
- 4.2 Le trièdre de Frenêt
- 5.1 Définition de l’ellipse
- 5.2 L’affinité
- 5.3 La relation entre et
- 5.4 La grande normale
- 5.5 L’ellipsoïde de révolution: ellipsoïde de référence
- 5.6 Calcul des coordonnées géodésiques
- 5.7 La correspondance de la sphère de Jacobi
- 6.1 Le repère cartésien
- 6.2 Le repère 3D
- 6.3 Le potentiel
- 7.1 Canevas des points
- 7.2 Sessions de densification d’observations GPS
- 7.3 Le triangle plan
- 8.1 Réduction de la distance suivant la pente
- 9.1 Représentation plane
- 9.2 Tangentes correspondantes
- 9.3 Angles correspondants
- 9.4 Types de représentation
- 9.5 Les directions principales
- 9.6 Indicatrice de Tissot
- 9.7 Correspondance
- 9.8 Image de
- 9.9 L’image d’un cercle
- 10.1 Interprétation géométrique
- 10.2 Images des parallèles et des méridiens
- 10.3 Le repère origine
- 10.4 Le repère
- 11.1 Interprétation géométrique de l’UTM
- 11.2 Passage de (X,Y) à
- 12.1 Le modèle de Bura-Wolf
- 12.2 Modèle de Helmert
- 13.1 Le géoïde
- 14.1 Jonction Tuniso-Italienne de 1876 (C. Fezzani, 1979)
- 14.2 La structure des réseaux géodésiques avant 1978
- 14.3 Le découpage des fuseaux (C. Fezzani, 1979)
- 14.4 Le repère STT
- 14.5 Le repère
- 14.6 Le Réseau Géodésique Primordial Tunisien
- 14.7 les décalages entre le système ancien (LV03) et le nouveau (LV95)
- 14.8 Le Réseau GPS Tunisien de Référence Spatiale (RGTRS)
- 15.1 Le repère céleste
- 15.2 Plan de l’orbite
- 16.1 Les fréquences du GPS
- 16.2 Le repère local
- 16.3 Positionnement absolu
- 16.4 Positionnement relatif(double différence)
- 16.5 Postionnement relatif (Triple différence)
- 19.1 La courbe de Gauss
- 19.2 La polygonale observée
List of Tables
- 3.1 Table des Unités
- 6.1 Caractéristiques des ellipsoïdes géodésiques (H. Moritz, 2000; C. Boucher, 1979a; DMA, 1987b)
- 7.1 Table des observations GPS
- 14.1 Caractéristiques de la représentation Lambert Tunisie
- 19.1 Table des observations
- 19.2 Table des coordonnées
Index
- Adrain R. §19.16
- Affinité Définition 5.2
- Affixe §9.8
- Aiguillon F. §9.9
- Al Battani M.J. §3.1
- Al Biruni A.R. §3.1
- Al Mamoun A.J. §3.1
- Al Mansour A.J. §3.1
- Al Rachid H. §3.1
- Al Tusi N. §3.1
- Al-Farghani A.A. §9.9
- Almanach §16.8
- Altération angulaire §9.6
- Altération linéaire §10.9, §8.2, §9.6
- Altitude de nivellement §6.2
- Altitude dynamique §13.1
- Altitude ellipsoïdique GPS §7.3
- Altitude GPS §13.1
- Altitude normale ou de Molodensky §13.1
- Altitude orthométrique §13.1, §14.8, §7.3
- Amari S. Théorème 19.1
- Ambiguïté entière §16.5
- Andoyer H. item 3, §3.4
- Angle horaire Définition 3.15
- Angles correspondants §9.2
- Anomalie excentrique §15.2
- Anomalie moyenne §15.2
- Anomalie vraie §15.2, Théorème 15.2
- Anti-Spoofing §16.2
- Argument §9.8
- Azimut d’un astre Définition 3.9
- Banach S. Exercice 18.1
- Beltrami E. Définition 9.8
- Bers L. item 11, Définition 9.8
- Bjerhammer A. Définition 19.5, Chapter 22
- Bonne R. §14.4
- Boucher C. §12.1, item 13, §6.5
- Brahé T. §3.1
- Brezinski C. §19.16, Chapter 22
- Bura M. §12.1, item 29, §6.2, Préface
- Bureau International de l’Heure §16.5
- Canevas §9.3
- Cartan H. §20.3, Chapter 22
- Cassini C.F. Problème 2.1
- Cassini J.D. §3.1
- Cercle horaire de l’astre Définition 3.14
- Champ central §15.1
- Champ de potentiel Définition 6.2
- Charfi M. §14.6, item 22
- Cholesky A.L. §19.16, Chapter 22
- Clairaut A.C. §5.5
- Clarke A.R. §6.5
- Codes aléatoires §16.4
- Coefficient de Beltrami Définition 9.8
- Coefficient de distorsion §9.9
- Collins J. item 28, §7.3
- Commiot J. item 19, §9.8, Remerciements
- Condition de renormalisation §19.12
- Conditions de Cauchy §9.8
- Constante d’énergie §15.1
- Constante des aires §15.1
- Constante universelle de la gravitation §15.1
- Convergence des méridiens §10.10
- Coordonnées curvilignes §4.3
- Coordonnées de Cassini-Soldner Problème 2.1, §9.4
- Coordonnées équatoriales célestes §3.4
- Coordonnées géographiques §3.4
- Coordonnées géoidales Définition 6.9
- Coordonnées locales horizontales §3.4
- Coordonnées sphériques §6.3
- Copernic N. §3.1
- Correction de courbure §8.2
- Cote équipotentielle §13.1
- Courbe de Gauss Figure 19.1
- Courbes coordonnées §10.1, §4.3, §9.3
- Courbes correspondantes §9.2
- Courbure de Gauss Définition 4.15
- Courbure moyenne Définition 4.15
- Courbure normale Définition 4.9
- Courbure totale Définition 4.15
- Cramér H. §19.10
- Culmination §3.4
- Danjon A. item 20, §3.4
- Darboux J.G. §4.5
- Datum géodésique §6.1, Définition 6.2
- Defense Mapping Agency item 24
- Degré de liberté §19.4
- Densité de probabilité §19.2
- Deuxième forme fondamentale §4.5
- Deuxième Loi de Kepler §15.1
- Deuxième théorème de Meusnier §4.5
- Déviation de la verticale Définition 6.10
- Dieudonné J. item 6, §9.8
- Directions principales §10.2, §4.5, §9.7
- Distance zénithale Définition 3.11
- Dombrowski P. item 15, §4.5
- Doppler C. §6.4
- Doubrovine B. item 21, §4.5
- Dufour H.M. item 16, Problème 9.8, Problème 9.8
- Dupin C. §4.5
- Eléments correspondants §9.2
- Eléments d’orbite §15.2
- Eléments osculateurs §15.3
- Ellipsoïde d’Airy §6.5
- Ellipsoïde de Clarke 1880 Français §14.3
- Ellipsoïde de Clarke Anglais §6.4, §6.5
- Ellipsoïde de Clarke Français §14.6, §14.8, §6.4, §6.5
- Ellipsoïde de révolution §5.4
- Ellipsoïde §7.3
- Ellipsoïde international de Hayford §6.4
- Ellipsoïde §16.5
- Ellipsoïdes géodésiques §6.5
- Ephémérides radiodiffusées §7.4
- Equation de Kepler §15.2
- Equation de Laplace §7.2
- Equations de condition §19.13
- Equations de Gauss-Weingarten §4.6
- Equations paramétriques §5.2
- Eratosthenes §3.1
- Erreurs moyennes quadratiques §19.3
- Estimateur efficace Définition 19.4
- Estimateur sans biais §19.7
- Euler L. §3.1, §4.5
- Excès sphérique §2.4
- Extremum local §18.2
- Facteur de réduction de l’échelle §10.9, §11.2
- Fezzani C. Figure 14.1, Figure 14.3, §14.2, §14.6, item 12, Problème 9.8, Préface, Remerciements
- Fisher R.A. §19.10, Définition 19.3, §21.3
- Fomenko A. item 21, §4.5
- Fonction analytique §9.8
- Fonction harmonique §9.8
- Fonction holomorphe §9.9
- Fonction homographique §9.8
- Fonction objectif ou énergie Définition 20.1
- Fonctions convexes §18.3
- Fontaine A. item 7
- Force perturbatrice §15.3
- Formule de Cassini §13.1
- Formule de Dufour-Ben Hadj Salem Problème 9.8
- Formule de Dufour-Fezzani Problème 9.8
- Formule de Schols-Laborde §10.11
- Formules de Molodensky §12.3
- Formules de Molodensky abrégées §12.5
- Formules de Molodensky standard §12.4
- Frenêt J.F. §4.2, Préface
- Fréquence fondamentale §16.4
- Gal §6.2
- Galilée G. §3.1, §6.2
- Gauss C.F. §19.16, §19.2, §21.1, §4.5, §4.5, §4.6, §6.2, §9.9
- Géodésie §1.1
- Géoïde §13.1, §6.2
- Gradient Définition 6.3
- Grafarend E.W. item 32, §21.1, Chapter 22, Remerciements
- Grande normale Définition 5.3
- Halley E. §3.1, §9.9
- Hamilton W.R. §15.1
- Hamiltonien §15.1
- Harmoniques sectoriaux §15.4
- Harmoniques sphériques §15.4
- Harmoniques tesseraux §15.4
- Harriot T. §9.9
- Hauteur d’un astre Définition 3.10
- Hauteur du géoïde §6.2
- Hayford J.F. §6.4, §6.5
- Heiskanen W.A. item 5, §6.2
- Helmert F.R. §1.1, item 1, Préface
- Hesse L.O. §20.3
- Heure sidérale locale §3.4
- Hipparque §3.1, §9.9
- Hofmann-Wellenhof B. item 28, §7.3
- Hottier P. Chapter 22, Remerciements
- Ibn Al Haitam H. §3.1
- IGPS Service §7.3
- Indicatrice de Dupin §4.5
- Indicatrice de Tissot §10.2, §9.7, Théorème 9.1
- Inégalité de Rao-Cramér §19.11
- Intégrale elliptique §11.3, §5.5
- Inverses généralisées §19.16
- Ionosphère §16.5
- Isomètre automécoïque §10.5
- Isomètre stationnaire §10.5
- J. Weingarten §4.6
- Jacobi C.G.J. Problème 5.4
- Julia G. item 4, §9.8
- Kastrup H.A. item 38, §9.9
- Kepler J. §15.1, §3.1
- Krakiwsky E.J. item 23, Remerciements
- Krassovsky N.F. §6.5
- L’Arrêté du 10 février 2009 §14.8
- La formule d’Euler §4.5
- La méthode de descente §20.4
- La méthode de Gauss-Newton §20.5
- La méthode de Newton §20.4, §20.4, §20.5
- La méthode des gradients §20.4
- La méthode Doppler §14.6, §14.6, §7.3
- La représentation UTM §11.1
- Laborde J. §10.11
- Lagrange J.L. §19.14, §3.1
- Lambert J.H. §14.4, §6.1
- Laplace P.S. Définition 6.4, §7.2
- Latitude croissante §4.4
- Latitude de Mercator §4.4
- Latitude isométrique §10.4
- Latitude paramétrique §5.1
- Latitude réduite §5.1
- Le GDOP 16.9
- Le HDOP 16.9
- Le laplacien Définition 6.4
- Le PDOP 16.9
- Le problème direct §5.6
- Le problème inverse §5.6
- Le TDOP 16.9
- Le VDOP 16.9
- Legendre A.M. §15.4, §19.16
- Lemenestrel J. item 18, §5.5, Remerciements
- Lemme de Pázman §21.3
- Lemme de Tissot Lemme 9.1
- Lemmens M. §1.1, item 41
- Les méthodes itératives de descente §20.4
- Lichtenegger H. item 28, §7.3
- Ligne géodésique §5.5
- Listing J.B. §6.2
- Maclaurin C. Théorème 18.3
- Marégraphe §14.8, §6.1, §6.2
- Markov A. §20.1, §21.1
- Marussi A. Chapter 14, item 9
- Master control station §16.2
- Matrice d’information de Fisher §19.10, §21.3
- Matrice de rotation §12.2, §12.8
- Matrice définie positive Théorème 20.3
- Matrice normale §19.12, §19.12
- Matrice semi-définie positive Théorème 20.3
- Mercator G. §4.4
- Meusnier J.B. §4.5
- Minimum global Définition 20.2
- Minimum global strict Définition 20.3
- Minimum relatif Théorème 20.2
- Minimum relatif strict Proposition 20.1
- Mode statique absolu §16.6
- Mode statique rapide §16.6
- Modèle de Bura-Wolf §12.2
- Modèle de Gauss-Markov §20.1, §21.2
- Module §9.8
- Module aréolaire §9.6
- Module linéaire §10.5, §8.2, §9.6
- Modules principaux §10.3, §9.7
- Molodensky M.S. §12.1, §12.3, Préface
- Moments d’inertie principaux §15.4
- Moments produits d’inertie §15.4
- Monge G. §9.9
- Monge H. item 17, §6.5
- Monitor station §15.4, §16.2
- Morando B. §15.4, item 10
- Moritz H. §15.1, item 36, item 5, §6.2, §6.5, §7.3
- Mouvement diurne §3.4
- Mueller I.I. §15.1, item 27
- Multiplicateurs de Lagrange §19.14
- Nagaoka H. Théorème 19.1
- Navigation Différentielle §16.6
- Nepier J. §2.3
- Newton I. §3.1
- Nivellement général de la Tunisie §14.8
- Novikov S. item 21, §4.5
- Observations de phases §16.5
- Observations en pseudo-distances §16.5
- Olbers H.W. §19.16
- Olver P.J. §20.3, Remerciements
- Ondulation du géoïde §13.1, §6.2, §7.3
- Orbite osculateur §15.3
- Ortega J.M. §20.2, Chapter 22
- P K. item 29, §6.2
- Paramétrisation conforme Problème 4.9
- Pázman A. §21.1, §21.3, Chapter 22
- Périgée Théorème 15.2
- Petersen P. item 33, §5.5
- Phase de battement §16.5
- Piazzi G. §19.16
- Pivot §9.3
- Plan tangent §4.3
- Poincaré H. item 2, §5.5
- Point critique Définition 20.5
- Point fondamental §7.2
- Points correspondants §9.2
- Pôle Conventionnel terrestre §16.5
- Polynômes de Legendre §15.4
- Positionnement absolu §16.6
- Positionnement relatif §16.6
- Potentiel de la pesanteur Définition 6.5
- Première forme fondamentale §4.4, §9.6
- Première Loi de Kepler §15.1
- Pressley A.N. item 40, Problème 4.8
- Ptolémée C. §3.1, §9.9
- Quantité d’information de Fisher Définition 19.3
- Rao C.R. §19.10
- Rayon de courbure Définition 4.2, Définition 4.4
- Rayon de courbure de l’ellipse §5.3
- Rayon de courbure de la méridienne §10.3
- Récepteur géodésique §16.3
- Réduction à l’horizontale §8.2
- Réduction à la corde §10.11
- Réduction au niveau zéro §8.2
- Réduction au plan de la représentation plane §8.2
- Référentiel WGS84 §16.5
- Relation de Clairaut §5.5
- Relation fondamentale de l’astronomie de position §3.4
- Représentation azimutale §9.5
- Représentation conforme §10.1, §9.7, §9.8
- Représentation conique §10.1, §9.5
- Représentation cylindrique §9.4
- Représentation de Bonne §14.4
- Représentation directe §10.1, §9.3
- Représentation équivalente §9.10
- Représentation Fuseaux §14.4
- Représentation Lambert §10.1, §14.4
- Représentation oblique §9.3
- Représentation quasi-conforme §9.9
- Représentation tangente §10.1
- Représentation transverse §9.3
- Représentation UTM §14.4, §14.8
- Représentations planes Chapter 9
- Réseau Carthage34 §14.1
- Réseau géodésique §1.1
- Réseau Géodésique Primordial §14.6
- Rheinboldt W.C. §20.2, Chapter 22
- Ribaucour A. §4.5
- Schaffrin B. §21.1, Chapter 22, Remerciements
- Secteur de contrôle §16.2
- Section normale §4.5
- Selective Availability §16.2
- Soldner J.G Problème 2.1
- Soler T. §12.1, item 31
- Sphère céleste Définition 3.1
- Surface de niveau Définition 6.7
- Surface équipotentielle §13.1, Définition 6.7
- Surface isotherme Problème 4.9
- Système altimétrique §6.1
- Système BT56 §6.4
- Système cartésien §6.1
- Système Carthage86 §14.6
- Système de coordonnées §6.3
- Système de référence §7.3
- Système de référence §7.3
- Système Doppler §16.1
- Système Europe 50 §6.4
- Système géocentrique §16.5
- Système géodésique Chapter 6
- Système géodésique NTT §14.7
- Système GPS Chapter 16
- Système LYB79 §6.4
- Système Merchich §6.4
- Système Nord Sahara §6.4
- Système OTC84 §14.6, §14.6
- Système Voirol §14.3, §6.4
- Systèmes d’altitudes §13.1
- Tangentes correspondantes §9.2
- Taylor B. Théorème 18.2
- Tchebychev P. Problème 4.8
- Temps sidéral de Greenwich §15.2
- Tenseur métrique §4.4
- Teunissen P.J.G. Chapter 20, §20.4, Chapter 22, Remerciements
- Thales D.M §3.1
- Théorème de Taylor-Maclaurin Théorème 18.3
- Théorème de Taylor-Young Théorème 18.2
- Tisserand F. item 3, §3.4
- Tissot N.A. §9.7
- Torsion Définition 4.7
- Transformation de Helmert §12.8
- Transformation de passage §12.1
- Triangle sphérique §2.1
- Triangulation §6.1
- Trièdre de Darboux - Ribaucour §4.5
- Trièdre de Frenêt §4.2
- Trilatération §6.1
- Troisième Loi de Kepler §15.1
- Troposphère §16.5
- UN-GGIM Chapter 1
- Vaniek P. item 23, Remerciements
- Variable de Mercator §4.4
- Variance unitaire §19.3
- Vecteur de gravité Définition 6.6
- Vecteur de Laplace §15.1, Théorème 15.2
- Verticale du lieu §6.3
- Vitesse de convergence §20.4
- Vitesse moyenne angulaire §15.2
- Wolf H. §12.1, item 32, Préface
- Young W.H. Théorème 18.2
- Zeidler E. item 42, §4.5, §9.8
Index
L’Auteur
L’auteur **Abdelmajid Ben Hadj Salem **est Ingénieur Géographe Général, retraité de l’Office de la Topographie et du Cadastre (OTC), ancien élève de l’Ecole Nationale des Sciences Géographiques de l’IGN France. Spécialiste en géodésie, il avait participé en 1982 aux travaux de terrain de la revalorisation de la géodésie tunisienne.
Membre de la commission technique de géodésie de l’OTC, il avait étudié en détail les systèmes et les réseaux géodésiques tunisiens et avait participé à la mise à niveau de la géodésie tunisienne. Il est aussi enseignant, depuis une vingtaine d’années en matière de géodésie à l’université tunisienne et également un formateur. Il a rédigé plus de 100 notes et rapports en la matière collectées en trois tomes de Selected Papers.
A. Ben Hadj Salem était membre de l’Association Internationale de Géodésie (AIG) et il avait participé aux calculs du projet ADOS (African Doppler Survey) initié par l’AIG, dans le cadre du Consortium Africain de Traitement des Données Doppler. Il avait représenté l’OTC à l’Organisation Africaine de Cartographie et de Télédétection en qualité d’expert technique. Il était aussi membre du comité de rédaction de Géo-Top la publication scientifique de l’OTC.